 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotionWAM: Towards Foundation World Action Models for Real-Time Humanoid Loco-Manipulation
Jun 08, 2026World Action Models (WAMs) couple a video dynamics prior to the policy and have shown encouraging results on tabletop manipulation, but iterative denoising over high-dimensional video-action latents leaves them too slow for real-time humanoid loco-manipulation. The problem is compounded by the dominant hierarchical paradigm, in which a high-level manipulation policy controls only the upper body while a low-level controller tracks coarse base commands -- placing upper and lower body in inconsistent action spaces and reducing the legs to balance-preserving locomotion. We present MotionWAM, a real-time WAM that drives autonomous humanoid loco-manipulation from a single egocentric camera by conditioning the policy on the intermediate denoising features of a video world model. MotionWAM replaces the upper-lower split with a unified motion latent and predicts whole-body motion tokens that jointly cover locomotion, torso motion, height regulation, foot interaction, and hand manipulation in a single action space. A three-stage learning framework progressively adapts the video world model to egocentric visual dynamics and to the target humanoid embodiment. On nine real-world Unitree G1 tasks, MotionWAM runs in real time, substantially outperforms Vision-Language-Action (VLA) baselines fine-tuned on the same demonstrations by over 30% in overall success rate, and executes task-driven foot interaction that decoupled upper-lower policies cannot reach. Our results suggest that video-pretrained WAMs can be lifted from tabletop manipulation to coordinated, human-like whole-body humanoid control.
Perceptive Behavior Foundation Model: Adapting Human Motion Priors to Robot-Centric Terrain
Jun 06, 2026Humanoid behavior foundation models aim to acquire reusable whole-body control policies from broad human motion priors, enabling a single controller to produce diverse and expressive behaviors. However, existing motion-centric foundation policies largely assume that the reference motion is already physically compatible with the robot's surroundings. This assumption breaks when the demonstrator, operator, and robot inhabit different environments: a human motion may specify the intended behavior, but not the footholds, clearance, body height, or contact timing required by the robot's local terrain. We introduce \emph{Perceptive Behavior Foundation Model} (Perceptive BFM), a terrain-aware humanoid control framework that grounds human motion priors in robot-centric perception. The model preserves raw kinematic motion references as the behavioral interface, while using local terrain observations to adapt contacts, posture, and timing. To provide scalable terrain supervision, we develop \emph{terrain-conformal reference synthesis} (TCRS), which converts locomotion-oriented human motion clips into terrain-consistent references through contact-aware foothold construction, foot-geometry-aware swing optimization, support-aware root reconstruction, collision repair, and multi-point inverse kinematics. We then train a blind adapted-reference teacher and transfer its terrain-conformal behavior to a deployed raw-reference student through target-frame action alignment. The student is an identity-gated Transformer tracker whose terrain features enter through residual pathways initialized to preserve the motion-tracking prior and trained to produce local corrections only when needed.
DiT4DiT: Jointly Modeling Video Dynamics and Actions for Generalizable Robot Control
Mar 11, 2026Vision-Language-Action (VLA) models have emerged as a promising paradigm for robot learning, but their representations are still largely inherited from static image-text pretraining, leaving physical dynamics to be learned from comparatively limited action data. Generative video models, by contrast, encode rich spatiotemporal structure and implicit physics, making them a compelling foundation for robotic manipulation. But their potentials are not fully explored in the literature. To bridge the gap, we introduce DiT4DiT, an end-to-end Video-Action Model that couples a video Diffusion Transformer with an action Diffusion Transformer in a unified cascaded framework. Instead of relying on reconstructed future frames, DiT4DiT extracts intermediate denoising features from the video generation process and uses them as temporally grounded conditions for action prediction. We further propose a dual flow-matching objective with decoupled timesteps and noise scales for video prediction, hidden-state extraction, and action inference, enabling coherent joint training of both modules. Across simulation and real-world benchmarks, DiT4DiT achieves state-of-the-art results, reaching average success rates of 98.6% on LIBERO and 50.8% on RoboCasa GR1 while using substantially less training data. On the Unitree G1 robot, it also delivers superior real-world performance and strong zero-shot generalization. Importantly, DiT4DiT improves sample efficiency by over 10x and speeds up convergence by up to 7x, demonstrating that video generation can serve as an effective scaling proxy for robot policy learning. We release code and models at https://dit4dit.github.io/.
End-to-End Humanoid Robot Safe and Comfortable Locomotion Policy
Aug 11, 2025The deployment of humanoid robots in unstructured, human-centric environments requires navigation capabilities that extend beyond simple locomotion to include robust perception, provable safety, and socially aware behavior. Current reinforcement learning approaches are often limited by blind controllers that lack environmental awareness or by vision-based systems that fail to perceive complex 3D obstacles. In this work, we present an end-to-end locomotion policy that directly maps raw, spatio-temporal LiDAR point clouds to motor commands, enabling robust navigation in cluttered dynamic scenes. We formulate the control problem as a Constrained Markov Decision Process (CMDP) to formally separate safety from task objectives. Our key contribution is a novel methodology that translates the principles of Control Barrier Functions (CBFs) into costs within the CMDP, allowing a model-free Penalized Proximal Policy Optimization (P3O) to enforce safety constraints during training. Furthermore, we introduce a set of comfort-oriented rewards, grounded in human-robot interaction research, to promote motions that are smooth, predictable, and less intrusive. We demonstrate the efficacy of our framework through a successful sim-to-real transfer to a physical humanoid robot, which exhibits agile and safe navigation around both static and dynamic 3D obstacles.
Omni-Perception: Omnidirectional Collision Avoidance for Legged Locomotion in Dynamic Environments
May 25, 2025Agile locomotion in complex 3D environments requires robust spatial awareness to safely avoid diverse obstacles such as aerial clutter, uneven terrain, and dynamic agents. Depth-based perception approaches often struggle with sensor noise, lighting variability, computational overhead from intermediate representations (e.g., elevation maps), and difficulties with non-planar obstacles, limiting performance in unstructured environments. In contrast, direct integration of LiDAR sensing into end-to-end learning for legged locomotion remains underexplored. We propose Omni-Perception, an end-to-end locomotion policy that achieves 3D spatial awareness and omnidirectional collision avoidance by directly processing raw LiDAR point clouds. At its core is PD-RiskNet (Proximal-Distal Risk-Aware Hierarchical Network), a novel perception module that interprets spatio-temporal LiDAR data for environmental risk assessment. To facilitate efficient policy learning, we develop a high-fidelity LiDAR simulation toolkit with realistic noise modeling and fast raycasting, compatible with platforms such as Isaac Gym, Genesis, and MuJoCo, enabling scalable training and effective sim-to-real transfer. Learning reactive control policies directly from raw LiDAR data enables the robot to navigate complex environments with static and dynamic obstacles more robustly than approaches relying on intermediate maps or limited sensing. We validate Omni-Perception through real-world experiments and extensive simulation, demonstrating strong omnidirectional avoidance capabilities and superior locomotion performance in highly dynamic environments. We will open-source our code and models.
Exploring the Limits of Vision-Language-Action Manipulations in Cross-task Generalization
May 21, 2025The generalization capabilities of vision-language-action (VLA) models to unseen tasks are crucial to achieving general-purpose robotic manipulation in open-world settings. However, the cross-task generalization capabilities of existing VLA models remain significantly underexplored. To address this gap, we introduce AGNOSTOS, a novel simulation benchmark designed to rigorously evaluate cross-task zero-shot generalization in manipulation. AGNOSTOS comprises 23 unseen manipulation tasks for testing, distinct from common training task distributions, and incorporates two levels of generalization difficulty to assess robustness. Our systematic evaluation reveals that current VLA models, despite being trained on diverse datasets, struggle to generalize effectively to these unseen tasks. To overcome this limitation, we propose Cross-Task In-Context Manipulation (X-ICM), a method that conditions large language models (LLMs) on in-context demonstrations from seen tasks to predict action sequences for unseen tasks. Additionally, we introduce a dynamics-guided sample selection strategy that identifies relevant demonstrations by capturing cross-task dynamics. On AGNOSTOS, X-ICM significantly improves cross-task zero-shot generalization performance over leading VLAs. We believe AGNOSTOS and X-ICM will serve as valuable tools for advancing general-purpose robotic manipulation.
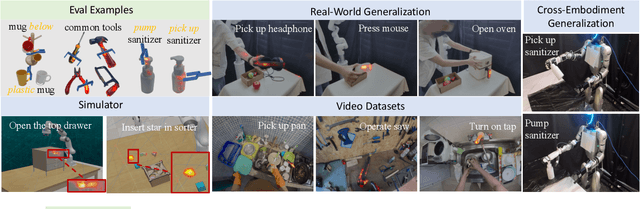
GLOVER++: Unleashing the Potential of Affordance Learning from Human Behaviors for Robotic Manipulation
May 17, 2025Learning manipulation skills from human demonstration videos offers a promising path toward generalizable and interpretable robotic intelligence-particularly through the lens of actionable affordances. However, transferring such knowledge remains challenging due to: 1) a lack of large-scale datasets with precise affordance annotations, and 2) insufficient exploration of affordances in diverse manipulation contexts. To address these gaps, we introduce HOVA-500K, a large-scale, affordance-annotated dataset comprising 500,000 images across 1,726 object categories and 675 actions. We also release a standardized benchmarking suite for multi-modal affordance reasoning. Built upon HOVA-500K, we present GLOVER++, a global-to-local affordance training framework that effectively transfers actionable affordance knowledge from human demonstrations to downstream open-vocabulary reasoning tasks. GLOVER++ achieves state-of-the-art results on the HOVA-500K benchmark and demonstrates strong generalization across diverse downstream robotic manipulation tasks. By explicitly modeling actionable affordances, GLOVER++ facilitates robust transfer across scenes, modalities, and tasks. We hope that HOVA-500K and the GLOVER++ framework will serve as valuable resources for bridging the gap between human demonstrations and robotic manipulation capabilities.
AffordanceSAM: Segment Anything Once More in Affordance Grounding
Apr 22, 2025Improving the generalization ability of an affordance grounding model to recognize regions for unseen objects and affordance functions is crucial for real-world application. However, current models are still far away from such standards. To address this problem, we introduce AffordanceSAM, an effective approach that extends SAM's generalization capacity to the domain of affordance grounding. For the purpose of thoroughly transferring SAM's robust performance in segmentation to affordance, we initially propose an affordance-adaption module in order to help modify SAM's segmentation output to be adapted to the specific functional regions required for affordance grounding. We concurrently make a coarse-to-fine training recipe to make SAM first be aware of affordance objects and actions coarsely, and then be able to generate affordance heatmaps finely. Both quantitative and qualitative experiments show the strong generalization capacity of our AffordanceSAM, which not only surpasses previous methods under AGD20K benchmark but also shows evidence to handle the task with novel objects and affordance functions.
Visual Object Tracking across Diverse Data Modalities: A Review
Dec 13, 2024



Visual Object Tracking (VOT) is an attractive and significant research area in computer vision, which aims to recognize and track specific targets in video sequences where the target objects are arbitrary and class-agnostic. The VOT technology could be applied in various scenarios, processing data of diverse modalities such as RGB, thermal infrared and point cloud. Besides, since no one sensor could handle all the dynamic and varying environments, multi-modal VOT is also investigated. This paper presents a comprehensive survey of the recent progress of both single-modal and multi-modal VOT, especially the deep learning methods. Specifically, we first review three types of mainstream single-modal VOT, including RGB, thermal infrared and point cloud tracking. In particular, we conclude four widely-used single-modal frameworks, abstracting their schemas and categorizing the existing inheritors. Then we summarize four kinds of multi-modal VOT, including RGB-Depth, RGB-Thermal, RGB-LiDAR and RGB-Language. Moreover, the comparison results in plenty of VOT benchmarks of the discussed modalities are presented. Finally, we provide recommendations and insightful observations, inspiring the future development of this fast-growing literature.
GLOVER: Generalizable Open-Vocabulary Affordance Reasoning for Task-Oriented Grasping
Nov 19, 2024


Inferring affordable (i.e., graspable) parts of arbitrary objects based on human specifications is essential for robots advancing toward open-vocabulary manipulation. Current grasp planners, however, are hindered by limited vision-language comprehension and time-consuming 3D radiance modeling, restricting real-time, open-vocabulary interactions with objects. To address these limitations, we propose GLOVER, a unified Generalizable Open-Vocabulary Affordance Reasoning framework, which fine-tunes the Large Language Models (LLMs) to predict visual affordance of graspable object parts within RGB feature space. We compile a dataset of over 10,000 images from human-object interactions, annotated with unified visual and linguistic affordance labels, to enable multi-modal fine-tuning. GLOVER inherits world knowledge and common-sense reasoning from LLMs, facilitating more fine-grained object understanding and sophisticated tool-use reasoning. To enable effective real-world deployment, we present Affordance-Aware Grasping Estimation (AGE), a non-parametric grasp planner that aligns the gripper pose with a superquadric surface derived from affordance data. In evaluations across 30 real-world scenes, GLOVER achieves success rates of 86.0% in part identification and 76.3% in grasping, with speeds approximately 330 times faster in affordance reasoning and 40 times faster in grasping pose estimation than the previous state-of-the-art.