 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-robot Task Allocation and Path Planning with Maximum Range Constraints
Sep 10, 2024



This letter presents a novel multi-robot task allocation and path planning method that considers robots' maximum range constraints in large-sized workspaces, enabling robots to complete the assigned tasks within their range limits. Firstly, we developed a fast path planner to solve global paths efficiently. Subsequently, we propose an innovative auction-based approach that integrates our path planner into the auction phase for reward computation while considering the robots' range limits. This method accounts for extra obstacle-avoiding travel distances rather than ideal straight-line distances, resolving the coupling between task allocation and path planning. Additionally, to avoid redundant computations during iterations, we implemented a lazy auction strategy to speed up the convergence of the task allocation. Finally, we validated the proposed method's effectiveness and application potential through extensive simulation and real-world experiments. The implementation code for our method will be available at https://github.com/wuuya1/RangeTAP.
DQFormer: Towards Unified LiDAR Panoptic Segmentation with Decoupled Queries
Aug 28, 2024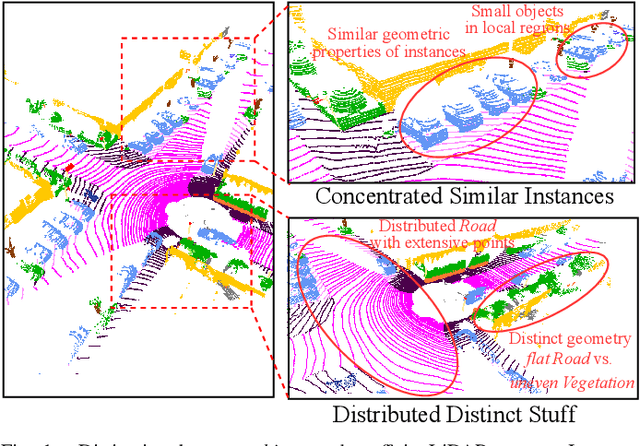
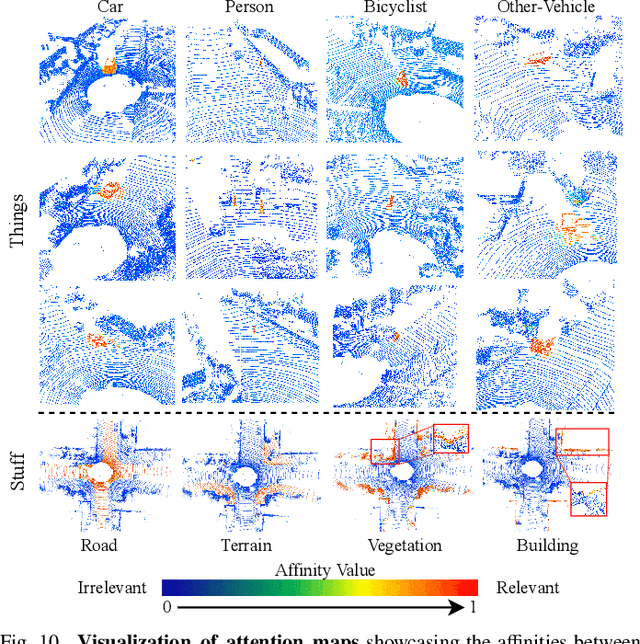
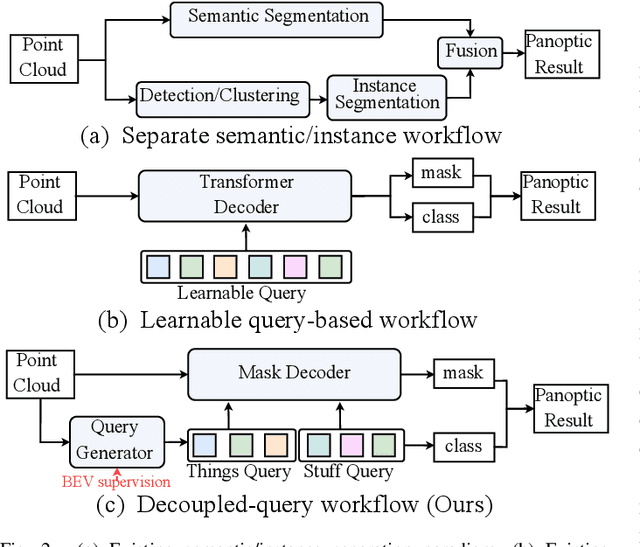
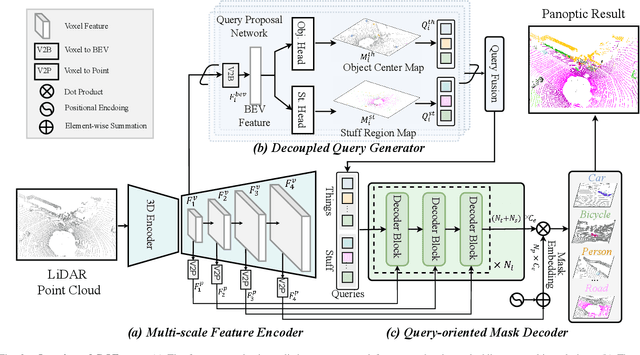
LiDAR panoptic segmentation, which jointly performs instance and semantic segmentation for things and stuff classes, plays a fundamental role in LiDAR perception tasks. While most existing methods explicitly separate these two segmentation tasks and utilize different branches (i.e., semantic and instance branches), some recent methods have embraced the query-based paradigm to unify LiDAR panoptic segmentation. However, the distinct spatial distribution and inherent characteristics of objects(things) and their surroundings(stuff) in 3D scenes lead to challenges, including the mutual competition of things/stuff and the ambiguity of classification/segmentation. In this paper, we propose decoupling things/stuff queries according to their intrinsic properties for individual decoding and disentangling classification/segmentation to mitigate ambiguity. To this end, we propose a novel framework dubbed DQFormer to implement semantic and instance segmentation in a unified workflow. Specifically, we design a decoupled query generator to propose informative queries with semantics by localizing things/stuff positions and fusing multi-level BEV embeddings. Moreover, a query-oriented mask decoder is introduced to decode corresponding segmentation masks by performing masked cross-attention between queries and mask embeddings. Finally, the decoded masks are combined with the semantics of the queries to produce panoptic results. Extensive experiments on nuScenes and SemanticKITTI datasets demonstrate the superiority of our DQFormer framework.
Synchronize Feature Extracting and Matching: A Single Branch Framework for 3D Object Tracking
Aug 24, 2023Siamese network has been a de facto benchmark framework for 3D LiDAR object tracking with a shared-parametric encoder extracting features from template and search region, respectively. This paradigm relies heavily on an additional matching network to model the cross-correlation/similarity of the template and search region. In this paper, we forsake the conventional Siamese paradigm and propose a novel single-branch framework, SyncTrack, synchronizing the feature extracting and matching to avoid forwarding encoder twice for template and search region as well as introducing extra parameters of matching network. The synchronization mechanism is based on the dynamic affinity of the Transformer, and an in-depth analysis of the relevance is provided theoretically. Moreover, based on the synchronization, we introduce a novel Attentive Points-Sampling strategy into the Transformer layers (APST), replacing the random/Farthest Points Sampling (FPS) method with sampling under the supervision of attentive relations between the template and search region. It implies connecting point-wise sampling with the feature learning, beneficial to aggregating more distinctive and geometric features for tracking with sparse points. Extensive experiments on two benchmark datasets (KITTI and NuScenes) show that SyncTrack achieves state-of-the-art performance in real-time tracking.