 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProvably Reliable Classifier Guidance via Cross-Entropy Control
Feb 05, 2026Classifier-guided diffusion models generate conditional samples by augmenting the reverse-time score with the gradient of the log-probability predicted by a probabilistic classifier. In practice, this classifier is usually obtained by minimizing an empirical loss function. While existing statistical theory guarantees good generalization performance when the sample size is sufficiently large, it remains unclear whether such training yields an effective guidance mechanism. We study this question in the context of cross-entropy loss, which is widely used for classifier training. Under mild smoothness assumptions on the classifier, we show that controlling the cross-entropy at each diffusion model step is sufficient to control the corresponding guidance error. In particular, probabilistic classifiers achieving conditional KL divergence $\varepsilon^2$ induce guidance vectors with mean squared error $\widetilde O(d \varepsilon )$, up to constant and logarithmic factors. Our result yields an upper bound on the sampling error of classifier-guided diffusion models and bears resemblance to a reverse log-Sobolev--type inequality. To the best of our knowledge, this is the first result that quantitatively links classifier training to guidance alignment in diffusion models, providing both a theoretical explanation for the empirical success of classifier guidance, and principled guidelines for selecting classifiers that induce effective guidance.
BABE: Biology Arena BEnchmark
Feb 05, 2026The rapid evolution of large language models (LLMs) has expanded their capabilities from basic dialogue to advanced scientific reasoning. However, existing benchmarks in biology often fail to assess a critical skill required of researchers: the ability to integrate experimental results with contextual knowledge to derive meaningful conclusions. To address this gap, we introduce BABE(Biology Arena BEnchmark), a comprehensive benchmark designed to evaluate the experimental reasoning capabilities of biological AI systems. BABE is uniquely constructed from peer-reviewed research papers and real-world biological studies, ensuring that tasks reflect the complexity and interdisciplinary nature of actual scientific inquiry. BABE challenges models to perform causal reasoning and cross-scale inference. Our benchmark provides a robust framework for assessing how well AI systems can reason like practicing scientists, offering a more authentic measure of their potential to contribute to biological research.
Retrieval-Infused Reasoning Sandbox: A Benchmark for Decoupling Retrieval and Reasoning Capabilities
Jan 29, 2026Despite strong performance on existing benchmarks, it remains unclear whether large language models can reason over genuinely novel scientific information. Most evaluations score end-to-end RAG pipelines, where reasoning is confounded with retrieval and toolchain choices, and the signal is further contaminated by parametric memorization and open-web volatility. We introduce DeR2, a controlled deep-research sandbox that isolates document-grounded reasoning while preserving core difficulties of deep search: multi-step synthesis, denoising, and evidence-based conclusion making. DeR2 decouples evidence access from reasoning via four regimes--Instruction-only, Concepts (gold concepts without documents), Related-only (only relevant documents), and Full-set (relevant documents plus topically related distractors)--yielding interpretable regime gaps that operationalize retrieval loss vs. reasoning loss and enable fine-grained error attribution. To prevent parametric leakage, we apply a two-phase validation that requires parametric failure without evidence while ensuring oracle-concept solvability. To ensure reproducibility, each instance provides a frozen document library (drawn from 2023-2025 theoretical papers) with expert-annotated concepts and validated rationales. Experiments across a diverse set of state-of-the-art foundation models reveal substantial variation and significant headroom: some models exhibit mode-switch fragility, performing worse with the Full-set than with Instruction-only, while others show structural concept misuse, correctly naming concepts but failing to execute them as procedures.
Provably Reliable Classifier Guidance through Cross-entropy Error Control
Jan 29, 2026Classifier-guided diffusion models generate conditional samples by augmenting the reverse-time score with the gradient of a learned classifier, yet it remains unclear whether standard classifier training procedures yield effective diffusion guidance. We address this gap by showing that, under mild smoothness assumptions on the classifiers, controlling the cross-entropy error at each diffusion step also controls the error of the resulting guidance vectors: classifiers achieving conditional KL divergence $\varepsilon^2$ from the ground-truth conditional label probabilities induce guidance vectors with mean squared error $\widetilde{O}(d \varepsilon )$. Our result yields an upper bound on the sampling error under classifier guidance and bears resemblance to a reverse log-Sobolev-type inequality. Moreover, we show that the classifier smoothness assumption is essential, by constructing simple counterexamples demonstrating that, without it, control of the guidance vector can fail for almost all distributions. To our knowledge, our work establishes the first quantitative link between classifier training and guidance alignment, yielding both a theoretical foundation for classifier guidance and principled guidelines for classifier selection.
SCE-SLAM: Scale-Consistent Monocular SLAM via Scene Coordinate Embeddings
Jan 14, 2026Monocular visual SLAM enables 3D reconstruction from internet video and autonomous navigation on resource-constrained platforms, yet suffers from scale drift, i.e., the gradual divergence of estimated scale over long sequences. Existing frame-to-frame methods achieve real-time performance through local optimization but accumulate scale drift due to the lack of global constraints among independent windows. To address this, we propose SCE-SLAM, an end-to-end SLAM system that maintains scale consistency through scene coordinate embeddings, which are learned patch-level representations encoding 3D geometric relationships under a canonical scale reference. The framework consists of two key modules: geometry-guided aggregation that leverages 3D spatial proximity to propagate scale information from historical observations through geometry-modulated attention, and scene coordinate bundle adjustment that anchors current estimates to the reference scale through explicit 3D coordinate constraints decoded from the scene coordinate embeddings. Experiments on KITTI, Waymo, and vKITTI demonstrate substantial improvements: our method reduces absolute trajectory error by 8.36m on KITTI compared to the best prior approach, while maintaining 36 FPS and achieving scale consistency across large-scale scenes.
FoundationSLAM: Unleashing the Power of Depth Foundation Models for End-to-End Dense Visual SLAM
Dec 31, 2025We present FoundationSLAM, a learning-based monocular dense SLAM system that addresses the absence of geometric consistency in previous flow-based approaches for accurate and robust tracking and mapping. Our core idea is to bridge flow estimation with geometric reasoning by leveraging the guidance from foundation depth models. To this end, we first develop a Hybrid Flow Network that produces geometry-aware correspondences, enabling consistent depth and pose inference across diverse keyframes. To enforce global consistency, we propose a Bi-Consistent Bundle Adjustment Layer that jointly optimizes keyframe pose and depth under multi-view constraints. Furthermore, we introduce a Reliability-Aware Refinement mechanism that dynamically adapts the flow update process by distinguishing between reliable and uncertain regions, forming a closed feedback loop between matching and optimization. Extensive experiments demonstrate that FoundationSLAM achieves superior trajectory accuracy and dense reconstruction quality across multiple challenging datasets, while running in real-time at 18 FPS, demonstrating strong generalization to various scenarios and practical applicability of our method.
Encyclo-K: Evaluating LLMs with Dynamically Composed Knowledge Statements
Dec 31, 2025Benchmarks play a crucial role in tracking the rapid advancement of large language models (LLMs) and identifying their capability boundaries. However, existing benchmarks predominantly curate questions at the question level, suffering from three fundamental limitations: vulnerability to data contamination, restriction to single-knowledge-point assessment, and reliance on costly domain expert annotation. We propose Encyclo-K, a statement-based benchmark that rethinks benchmark construction from the ground up. Our key insight is that knowledge statements, not questions, can serve as the unit of curation, and questions can then be constructed from them. We extract standalone knowledge statements from authoritative textbooks and dynamically compose them into evaluation questions through random sampling at test time. This design directly addresses all three limitations: the combinatorial space is too vast to memorize, and model rankings remain stable across dynamically generated question sets, enabling reliable periodic dataset refresh; each question aggregates 8-10 statements for comprehensive multi-knowledge assessment; annotators only verify formatting compliance without requiring domain expertise, substantially reducing annotation costs. Experiments on over 50 LLMs demonstrate that Encyclo-K poses substantial challenges with strong discriminative power. Even the top-performing OpenAI-GPT-5.1 achieves only 62.07% accuracy, and model performance displays a clear gradient distribution--reasoning models span from 16.04% to 62.07%, while chat models range from 9.71% to 50.40%. These results validate the challenges introduced by dynamic evaluation and multi-statement comprehensive understanding. These findings establish Encyclo-K as a scalable framework for dynamic evaluation of LLMs' comprehensive understanding over multiple fine-grained disciplinary knowledge statements.
Electromagnetic Quantitative Inversion for Translationally Moving Targets via Phase Correlation Registration of Back-Projection Images
Nov 19, 2025A novel electromagnetic quantitative inversion scheme for translationally moving targets via phase correlation registration of back-projection (BP) images is proposed. Based on a time division multiplexing multiple-input multiple-output (TDM-MIMO) radar architecture, the scheme first achieves high-precision relative positioning of the target, then applies relative motion compensation to perform iterative inversion on multi-cycle MIMO measurement data, thereby reconstructing the target's electromagnetic parameters. As a general framework compatible with other mainstream inversion algorithms, we exemplify our approach by incorporating the classical cross-correlated contrast source inversion (CC-CSI) into iterative optimization step of the scheme, resulting in a new algorithm termed RMC-CC-CSI. Numerical and experimental results demonstrate that RMC-CC-CSI offers accelerated convergence, enhanced reconstruction fidelity, and improved noise immunity over conventional CC-CSI for stationary targets despite increased computational cost.
Reason-KE++: Aligning the Process, Not Just the Outcome, for Faithful LLM Knowledge Editing
Nov 16, 2025



Aligning Large Language Models (LLMs) to be faithful to new knowledge in complex, multi-hop reasoning tasks is a critical, yet unsolved, challenge. We find that SFT-based methods, e.g., Reason-KE, while state-of-the-art, suffer from a "faithfulness gap": they optimize for format mimicry rather than sound reasoning. This gap enables the LLM's powerful parametric priors to override new contextual facts, resulting in critical factual hallucinations (e.g., incorrectly reasoning "Houston" from "NASA" despite an explicit edit). To solve this core LLM alignment problem, we propose Reason-KE++, an SFT+RL framework that instills process-level faithfulness. Its core is a Stage-aware Reward mechanism that provides dense supervision for intermediate reasoning steps (e.g., Decomposition, Sub-answer Correctness). Crucially, we identify that naive outcome-only RL is a deceptive trap for LLM alignment: it collapses reasoning integrity (e.g., 19.00% Hop acc) while superficially boosting final accuracy. Our process-aware framework sets a new SOTA of 95.48% on MQUAKE-CF-3k (+5.28%), demonstrating that for complex tasks, aligning the reasoning process is essential for building trustworthy LLMs.
AffordBot: 3D Fine-grained Embodied Reasoning via Multimodal Large Language Models
Nov 13, 2025
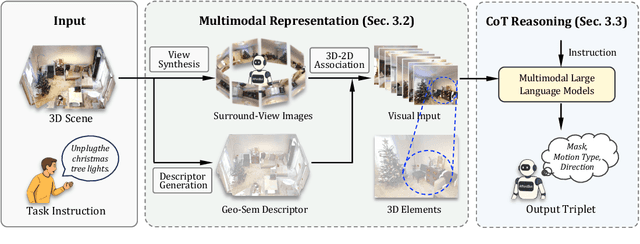


Effective human-agent collaboration in physical environments requires understanding not only what to act upon, but also where the actionable elements are and how to interact with them. Existing approaches often operate at the object level or disjointedly handle fine-grained affordance reasoning, lacking coherent, instruction-driven grounding and reasoning. In this work, we introduce a new task: Fine-grained 3D Embodied Reasoning, which requires an agent to predict, for each referenced affordance element in a 3D scene, a structured triplet comprising its spatial location, motion type, and motion axis, based on a task instruction. To solve this task, we propose AffordBot, a novel framework that integrates Multimodal Large Language Models (MLLMs) with a tailored chain-of-thought (CoT) reasoning paradigm. To bridge the gap between 3D input and 2D-compatible MLLMs, we render surround-view images of the scene and project 3D element candidates into these views, forming a rich visual representation aligned with the scene geometry. Our CoT pipeline begins with an active perception stage, prompting the MLLM to select the most informative viewpoint based on the instruction, before proceeding with step-by-step reasoning to localize affordance elements and infer plausible interaction motions. Evaluated on the SceneFun3D dataset, AffordBot achieves state-of-the-art performance, demonstrating strong generalization and physically grounded reasoning with only 3D point cloud input and MLLMs.