 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeL2COcc: Lightweight Camera-Centric Semantic Scene Completion via Distillation of LiDAR Model
Mar 16, 2025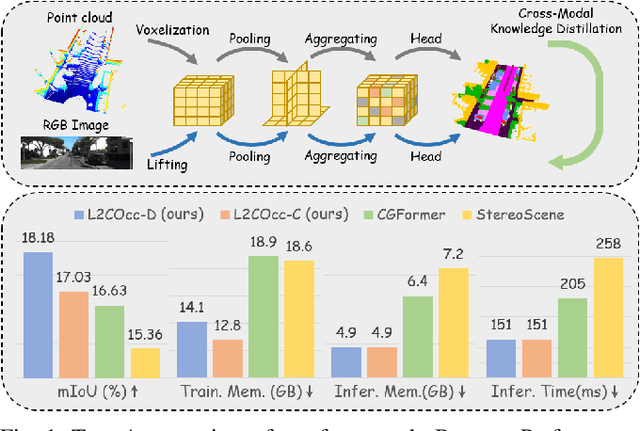
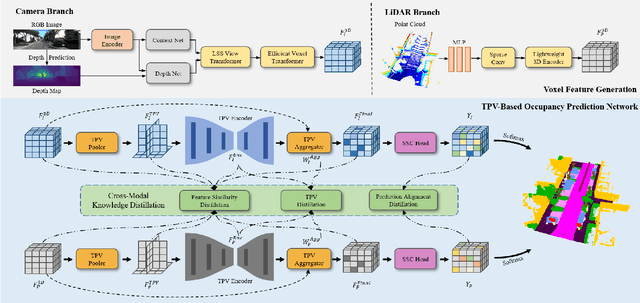
Semantic Scene Completion (SSC) constitutes a pivotal element in autonomous driving perception systems, tasked with inferring the 3D semantic occupancy of a scene from sensory data. To improve accuracy, prior research has implemented various computationally demanding and memory-intensive 3D operations, imposing significant computational requirements on the platform during training and testing. This paper proposes L2COcc, a lightweight camera-centric SSC framework that also accommodates LiDAR inputs. With our proposed efficient voxel transformer (EVT) and cross-modal knowledge modules, including feature similarity distillation (FSD), TPV distillation (TPVD) and prediction alignment distillation (PAD), our method substantially reduce computational burden while maintaining high accuracy. The experimental evaluations demonstrate that our proposed method surpasses the current state-of-the-art vision-based SSC methods regarding accuracy on both the SemanticKITTI and SSCBench-KITTI-360 benchmarks, respectively. Additionally, our method is more lightweight, exhibiting a reduction in both memory consumption and inference time by over 23% compared to the current state-of-the-arts method. Code is available at our project page:https://studyingfufu.github.io/L2COcc/.
Multi-robot Task Allocation and Path Planning with Maximum Range Constraints
Sep 10, 2024



This letter presents a novel multi-robot task allocation and path planning method that considers robots' maximum range constraints in large-sized workspaces, enabling robots to complete the assigned tasks within their range limits. Firstly, we developed a fast path planner to solve global paths efficiently. Subsequently, we propose an innovative auction-based approach that integrates our path planner into the auction phase for reward computation while considering the robots' range limits. This method accounts for extra obstacle-avoiding travel distances rather than ideal straight-line distances, resolving the coupling between task allocation and path planning. Additionally, to avoid redundant computations during iterations, we implemented a lazy auction strategy to speed up the convergence of the task allocation. Finally, we validated the proposed method's effectiveness and application potential through extensive simulation and real-world experiments. The implementation code for our method will be available at https://github.com/wuuya1/RangeTAP.