 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniversal Adversarial Purification with DDIM Metric Loss for Stable Diffusion
Jan 12, 2026Stable Diffusion (SD) often produces degraded outputs when the training dataset contains adversarial noise. Adversarial purification offers a promising solution by removing adversarial noise from contaminated data. However, existing purification methods are primarily designed for classification tasks and fail to address SD-specific adversarial strategies, such as attacks targeting the VAE encoder, UNet denoiser, or both. To address the gap in SD security, we propose Universal Diffusion Adversarial Purification (UDAP), a novel framework tailored for defending adversarial attacks targeting SD models. UDAP leverages the distinct reconstruction behaviors of clean and adversarial images during Denoising Diffusion Implicit Models (DDIM) inversion to optimize the purification process. By minimizing the DDIM metric loss, UDAP can effectively remove adversarial noise. Additionally, we introduce a dynamic epoch adjustment strategy that adapts optimization iterations based on reconstruction errors, significantly improving efficiency without sacrificing purification quality. Experiments demonstrate UDAP's robustness against diverse adversarial methods, including PID (VAE-targeted), Anti-DreamBooth (UNet-targeted), MIST (hybrid), and robustness-enhanced variants like Anti-Diffusion (Anti-DF) and MetaCloak. UDAP also generalizes well across SD versions and text prompts, showcasing its practical applicability in real-world scenarios.
Enhancing Hyperbole and Metaphor Detection with Their Bidirectional Dynamic Interaction and Emotion Knowledge
Jun 18, 2025Text-based hyperbole and metaphor detection are of great significance for natural language processing (NLP) tasks. However, due to their semantic obscurity and expressive diversity, it is rather challenging to identify them. Existing methods mostly focus on superficial text features, ignoring the associations of hyperbole and metaphor as well as the effect of implicit emotion on perceiving these rhetorical devices. To implement these hypotheses, we propose an emotion-guided hyperbole and metaphor detection framework based on bidirectional dynamic interaction (EmoBi). Firstly, the emotion analysis module deeply mines the emotion connotations behind hyperbole and metaphor. Next, the emotion-based domain mapping module identifies the target and source domains to gain a deeper understanding of the implicit meanings of hyperbole and metaphor. Finally, the bidirectional dynamic interaction module enables the mutual promotion between hyperbole and metaphor. Meanwhile, a verification mechanism is designed to ensure detection accuracy and reliability. Experiments show that EmoBi outperforms all baseline methods on four datasets. Specifically, compared to the current SoTA, the F1 score increased by 28.1% for hyperbole detection on the TroFi dataset and 23.1% for metaphor detection on the HYPO-L dataset. These results, underpinned by in-depth analyses, underscore the effectiveness and potential of our approach for advancing hyperbole and metaphor detection.
VIS-Shepherd: Constructing Critic for LLM-based Data Visualization Generation
Jun 16, 2025Data visualization generation using Large Language Models (LLMs) has shown promising results but often produces suboptimal visualizations that require human intervention for improvement. In this work, we introduce VIS-Shepherd, a specialized Multimodal Large Language Model (MLLM)-based critic to evaluate and provide feedback for LLM-generated data visualizations. At the core of our approach is a framework to construct a high-quality visualization critique dataset, where we collect human-created visualization instances, synthesize corresponding LLM-generated instances, and construct high-quality critiques. We conduct both model-based automatic evaluation and human preference studies to evaluate the effectiveness of our approach. Our experiments show that even small (7B parameters) open-source MLLM models achieve substantial performance gains by leveraging our high-quality visualization critique dataset, reaching levels comparable to much larger open-source or even proprietary models. Our work demonstrates significant potential for MLLM-based automated visualization critique and indicates promising directions for enhancing LLM-based data visualization generation. Our project page: https://github.com/bopan3/VIS-Shepherd.
EVOREFUSE: Evolutionary Prompt Optimization for Evaluation and Mitigation of LLM Over-Refusal to Pseudo-Malicious Instructions
May 29, 2025



Large language models (LLMs) frequently refuse to respond to pseudo-malicious instructions: semantically harmless input queries triggering unnecessary LLM refusals due to conservative safety alignment, significantly impairing user experience. Collecting such instructions is crucial for evaluating and mitigating over-refusals, but existing instruction curation methods, like manual creation or instruction rewriting, either lack scalability or fail to produce sufficiently diverse and effective refusal-inducing prompts. To address these limitations, we introduce EVOREFUSE, a prompt optimization approach that generates diverse pseudo-malicious instructions consistently eliciting confident refusals across LLMs. EVOREFUSE employs an evolutionary algorithm exploring the instruction space in more diverse directions than existing methods via mutation strategies and recombination, and iteratively evolves seed instructions to maximize evidence lower bound on LLM refusal probability. Using EVOREFUSE, we create two novel datasets: EVOREFUSE-TEST, a benchmark of 582 pseudo-malicious instructions that outperforms the next-best benchmark with 140.41% higher average refusal triggering rate across 9 LLMs, 34.86% greater lexical diversity, and 40.03% improved LLM response confidence scores; and EVOREFUSE-ALIGN, which provides 3,000 pseudo-malicious instructions with responses for supervised and preference-based alignment training. LLAMA3.1-8B-INSTRUCT supervisedly fine-tuned on EVOREFUSE-ALIGN achieves up to 14.31% fewer over-refusals than models trained on the second-best alignment dataset, without compromising safety. Our analysis with EVOREFUSE-TEST reveals models trigger over-refusals by overly focusing on sensitive keywords while ignoring broader context.
Multi-Granular Multimodal Clue Fusion for Meme Understanding
Mar 16, 2025With the continuous emergence of various social media platforms frequently used in daily life, the multimodal meme understanding (MMU) task has been garnering increasing attention. MMU aims to explore and comprehend the meanings of memes from various perspectives by performing tasks such as metaphor recognition, sentiment analysis, intention detection, and offensiveness detection. Despite making progress, limitations persist due to the loss of fine-grained metaphorical visual clue and the neglect of multimodal text-image weak correlation. To overcome these limitations, we propose a multi-granular multimodal clue fusion model (MGMCF) to advance MMU. Firstly, we design an object-level semantic mining module to extract object-level image feature clues, achieving fine-grained feature clue extraction and enhancing the model's ability to capture metaphorical details and semantics. Secondly, we propose a brand-new global-local cross-modal interaction model to address the weak correlation between text and images. This model facilitates effective interaction between global multimodal contextual clues and local unimodal feature clues, strengthening their representations through a bidirectional cross-modal attention mechanism. Finally, we devise a dual-semantic guided training strategy to enhance the model's understanding and alignment of multimodal representations in the semantic space. Experiments conducted on the widely-used MET-MEME bilingual dataset demonstrate significant improvements over state-of-the-art baselines. Specifically, there is an 8.14% increase in precision for offensiveness detection task, and respective accuracy enhancements of 3.53%, 3.89%, and 3.52% for metaphor recognition, sentiment analysis, and intention detection tasks. These results, underpinned by in-depth analyses, underscore the effectiveness and potential of our approach for advancing MMU.
Deep Learning-based Automated Diagnosis of Obstructive Sleep Apnea and Sleep Stage Classification in Children Using Millimeter-wave Radar and Pulse Oximeter
Sep 28, 2024


Study Objectives: To evaluate the agreement between the millimeter-wave radar-based device and polysomnography (PSG) in diagnosis of obstructive sleep apnea (OSA) and classification of sleep stage in children. Methods: 281 children, aged 1 to 18 years, who underwent sleep monitoring between September and November 2023 at the Sleep Center of Beijing Children's Hospital, Capital Medical University, were recruited in the study. All enrolled children underwent sleep monitoring by PSG and the millimeter-wave radar-based device, QSA600, simultaneously. QSA600 recordings were automatically analyzed using a deep learning model meanwhile the PSG data was manually scored. Results: The Obstructive Apnea-Hypopnea Index (OAHI) obtained from QSA600 and PSG demonstrates a high level of agreement with an intraclass correlation coefficient of 0.945 (95% CI: 0.93 to 0.96). Bland-Altman analysis indicates that the mean difference of OAHI between QSA600 and PSG is -0.10 events/h (95% CI: -11.15 to 10.96). The deep learning model evaluated through cross-validation showed good sensitivity (81.8%, 84.3% and 89.7%) and specificity (90.5%, 95.3% and 97.1%) values for diagnosing children with OAHI>1, OAHI>5 and OAHI>10. The area under the receiver operating characteristic curve is 0.923, 0.955 and 0.988, respectively. For sleep stage classification, the model achieved Kappa coefficients of 0.854, 0.781, and 0.734, with corresponding overall accuracies of 95.0%, 84.8%, and 79.7% for Wake-sleep classification, Wake-REM-Light-Deep classification, and Wake-REM-N1-N2 N3 classification, respectively. Conclusions: QSA600 has demonstrated high agreement with PSG in diagnosing OSA and performing sleep staging in children. The device is portable, low-load and suitable for follow up and long-term pediatric sleep assessment.
Reverse Multi-Choice Dialogue Commonsense Inference with Graph-of-Thought
Dec 27, 2023



With the proliferation of dialogic data across the Internet, the Dialogue Commonsense Multi-choice Question Answering (DC-MCQ) task has emerged as a response to the challenge of comprehending user queries and intentions. Although prevailing methodologies exhibit effectiveness in addressing single-choice questions, they encounter difficulties in handling multi-choice queries due to the heightened intricacy and informational density. In this paper, inspired by the human cognitive process of progressively excluding options, we propose a three-step Reverse Exclusion Graph-of-Thought (ReX-GoT) framework, including Option Exclusion, Error Analysis, and Combine Information. Specifically, our ReX-GoT mimics human reasoning by gradually excluding irrelevant options and learning the reasons for option errors to choose the optimal path of the GoT and ultimately infer the correct answer. By progressively integrating intricate clues, our method effectively reduces the difficulty of multi-choice reasoning and provides a novel solution for DC-MCQ. Extensive experiments on the CICERO and CICERO$_{v2}$ datasets validate the significant improvement of our approach on DC-MCQ task. On zero-shot setting, our model outperform the best baseline by 17.67% in terms of F1 score for the multi-choice task. Most strikingly, our GPT3.5-based ReX-GoT framework achieves a remarkable 39.44% increase in F1 score.
A Bi-directional Multi-hop Inference Model for Joint Dialog Sentiment Classification and Act Recognition
Aug 12, 2023



The joint task of Dialog Sentiment Classification (DSC) and Act Recognition (DAR) aims to predict the sentiment label and act label for each utterance in a dialog simultaneously. However, current methods encode the dialog context in only one direction, which limits their ability to thoroughly comprehend the context. Moreover, these methods overlook the explicit correlations between sentiment and act labels, which leads to an insufficient ability to capture rich sentiment and act clues and hinders effective and accurate reasoning. To address these issues, we propose a Bi-directional Multi-hop Inference Model (BMIM) that leverages a feature selection network and a bi-directional multi-hop inference network to iteratively extract and integrate rich sentiment and act clues in a bi-directional manner. We also employ contrastive learning and dual learning to explicitly model the correlations of sentiment and act labels. Our experiments on two widely-used datasets show that BMIM outperforms state-of-the-art baselines by at least 2.6% on F1 score in DAR and 1.4% on F1 score in DSC. Additionally, Our proposed model not only improves the performance but also enhances the interpretability of the joint sentiment and act prediction task.
ECQED: Emotion-Cause Quadruple Extraction in Dialogs
Jun 10, 2023The existing emotion-cause pair extraction (ECPE) task, unfortunately, ignores extracting the emotion type and cause type, while these fine-grained meta-information can be practically useful in real-world applications, i.e., chat robots and empathic dialog generation. Also the current ECPE is limited to the scenario of single text piece, while neglecting the studies at dialog level that should have more realistic values. In this paper, we extend the ECPE task with a broader definition and scenario, presenting a new task, Emotion-Cause Quadruple Extraction in Dialogs (ECQED), which requires detecting emotion-cause utterance pairs and emotion and cause types. We present an ECQED model based on a structural and semantic heterogeneous graph as well as a parallel grid tagging scheme, which advances in effectively incorporating the dialog context structure, meanwhile solving the challenging overlapped quadruple issue. Via experiments we show that introducing the fine-grained emotion and cause features evidently helps better dialog generation. Also our proposed ECQED system shows exceptional superiority over baselines on both the emotion-cause quadruple or pair extraction tasks, meanwhile being highly efficient.
Design of a Flying Humanoid Robot Based on Thrust Vector Control
Aug 26, 2021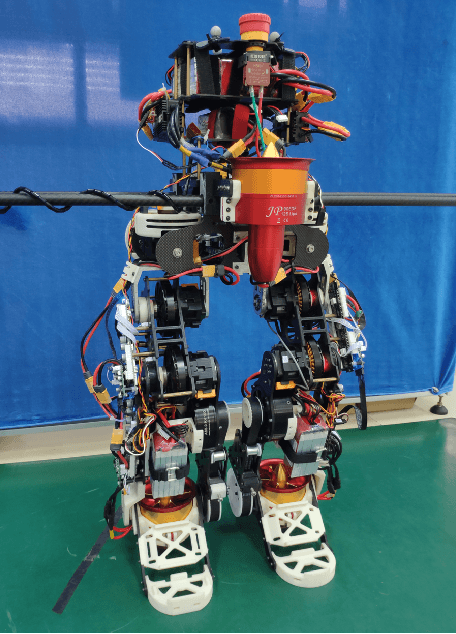
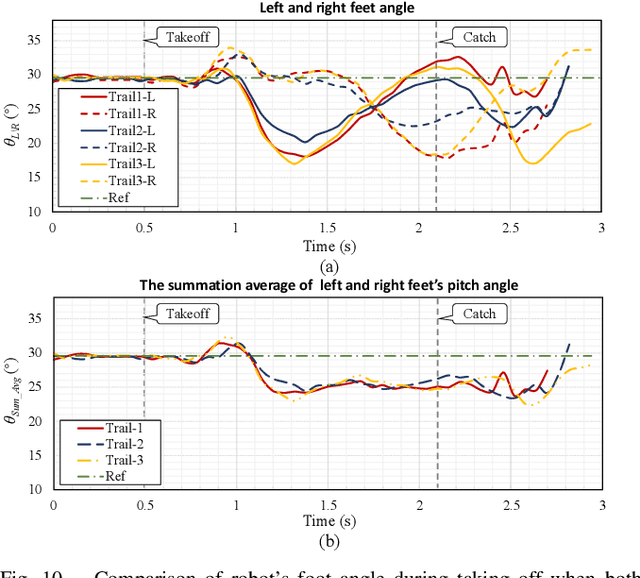
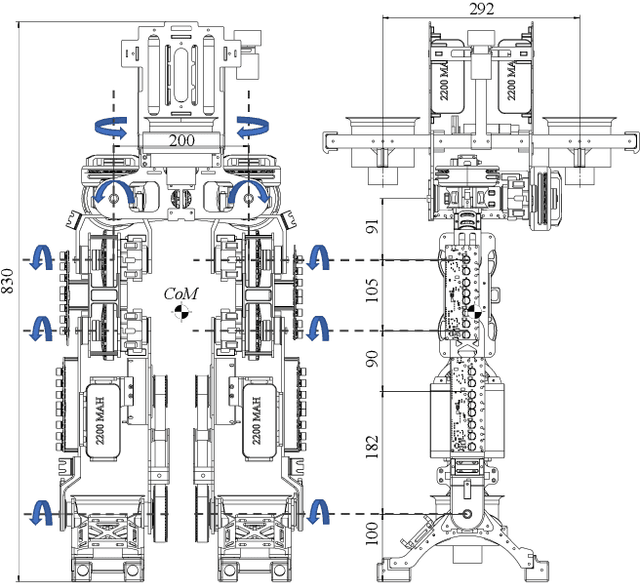
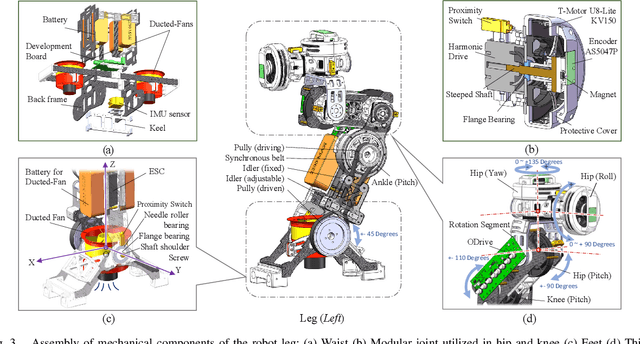
Achieving short-distance flight helps improve the efficiency of humanoid robots moving in complex environments (e.g., crossing large obstacles or reaching high places) for rapid emergency missions. This study proposes a design of a flying humanoid robot named Jet-HR2. The robot has 10 joints driven by brushless motors and harmonic drives for locomotion. To overcome the challenge of the stable-attitude takeoff in small thrust-to-weight conditions, the robot was designed based on the concept of thrust vectoring. The propulsion system consists of four ducted fans, that is, two fixed on the waist of the robot and the other two mounted on the feet, for thrust vector control. The thrust vector is controlled by adjusting the attitude of the foot during the flight. A simplified model and control strategies are proposed to solve the problem of attitude instability caused by mass errors and joint position errors during takeoff. The experimental results show that the robot's spin and dive behaviors during takeoff were effectively suppressed by controlling the thrust vector of the ducted fan on the foot. The robot successfully achieved takeoff at a thrust-to-weight ratio of 1.17 (17 kg / 20 kg) and maintained a stable attitude, reaching a takeoff height of over 1000 mm.