 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensing Mutual Information with Random Signals in Gaussian Channels: Bridging Sensing and Communication Metrics
Feb 06, 2024Sensing performance is typically evaluated by classical radar metrics, such as Cramer-Rao bound and signal-to-clutter-plus-noise ratio. The recent development of the integrated sensing and communication (ISAC) framework motivated the efforts to unify the performance metric for sensing and communication, where mutual information (MI) was proposed as a sensing performance metric with deterministic signals. However, the need of communication in ISAC systems necessitates the transmission of random signals for sensing applications, whereas an explicit evaluation for the sensing mutual information (SMI) with random signals is not yet available in the literature. This paper aims to fill the research gap and investigate the unification of sensing and communication performance metrics. For that purpose, we first derive the explicit expression for the SMI with random signals utilizing random matrix theory. On top of that, we further build up the connections between SMI and traditional sensing metrics, such as ergodic minimum mean square error (EMMSE), ergodic linear minimum mean square error (ELMMSE), and ergodic Bayesian Cram\'{e}r-Rao bound (EBCRB). Such connections open up the opportunity to unify sensing and communication performance metrics, which facilitates the analysis and design for ISAC systems. Finally, SMI is utilized to optimize the precoder for both sensing-only and ISAC applications. Simulation results validate the accuracy of the theoretical results and the effectiveness of the proposed precoding designs.
Sensiverse: A dataset for ISAC study
Aug 26, 2023



In order to address the lack of applicable channel models for ISAC research and evaluation, we release Sensiverse, a dataset that can be used for ISAC research. In this paper, we present the method of generating Sensiverse, including the acquisition and formatting of the 3D scene models, the generation of the channel data and associations with Tx/Rx deployment. The file structure and usage of the dataset are also described, and finally the use of the dataset is illustrated with examples through the evaluation of use cases such as 3D environment reconstruction and moving targets.
Design of a Flying Humanoid Robot Based on Thrust Vector Control
Aug 26, 2021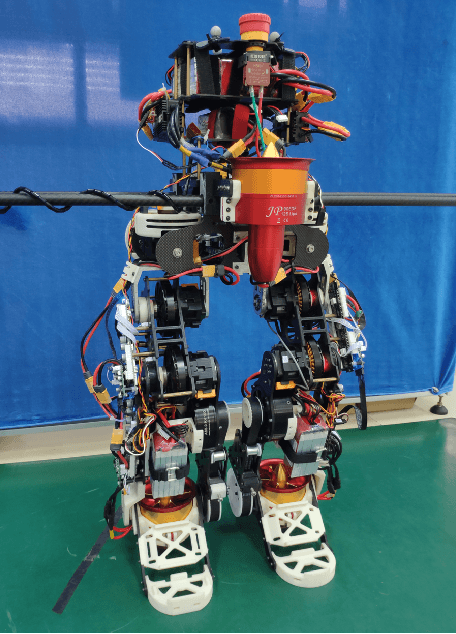
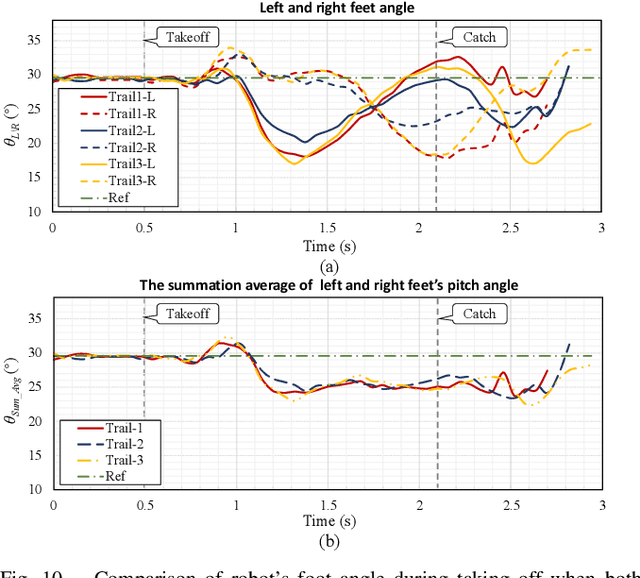
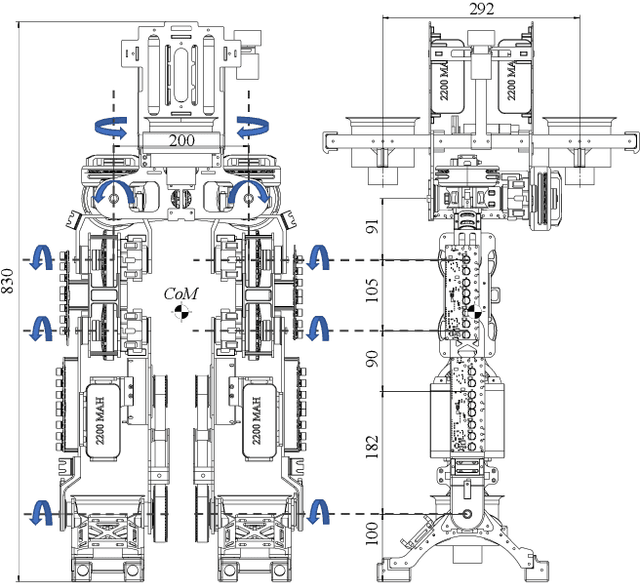
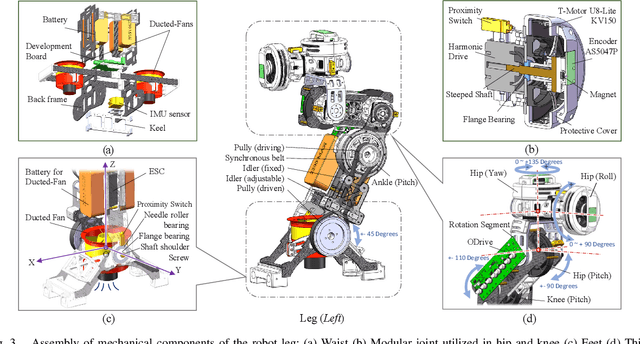
Achieving short-distance flight helps improve the efficiency of humanoid robots moving in complex environments (e.g., crossing large obstacles or reaching high places) for rapid emergency missions. This study proposes a design of a flying humanoid robot named Jet-HR2. The robot has 10 joints driven by brushless motors and harmonic drives for locomotion. To overcome the challenge of the stable-attitude takeoff in small thrust-to-weight conditions, the robot was designed based on the concept of thrust vectoring. The propulsion system consists of four ducted fans, that is, two fixed on the waist of the robot and the other two mounted on the feet, for thrust vector control. The thrust vector is controlled by adjusting the attitude of the foot during the flight. A simplified model and control strategies are proposed to solve the problem of attitude instability caused by mass errors and joint position errors during takeoff. The experimental results show that the robot's spin and dive behaviors during takeoff were effectively suppressed by controlling the thrust vector of the ducted fan on the foot. The robot successfully achieved takeoff at a thrust-to-weight ratio of 1.17 (17 kg / 20 kg) and maintained a stable attitude, reaching a takeoff height of over 1000 mm.