 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgenuReasoning: A Reasoning-Centric Dataset and Benchmark for Long-Tail Autonomous Driving
May 29, 2026Reasoning is essential for autonomous driving (AD) in long-tail scenarios, where vehicles must apply commonsense knowledge, understand spatial relations, infer agent interactions, and make safe decisions. However, existing AD datasets and benchmarks mainly target perception, prediction, or planning, and provide limited supervision for reasoning over realistic long-tail driving scenes. We introduce nuReasoning, a large-scale real-world dataset and benchmark for reasoning-centric AD. Following the lineage of nuScenes and nuPlan, nuReasoning advances real-world AD datasets and benchmarks toward reasoning in long-tail driving scenarios. The dataset contains 20,000 clips, each 20 seconds long, collected across multiple cities, with synchronized multi-camera images, LiDAR data, HD maps, object annotations, and human-verified reasoning annotations spanning Spatial Reasoning, Decision Reasoning, and Counterfactual Reasoning. Unlike prior datasets that focus primarily on visual question answering, nuReasoning supports both reasoning evaluation and planning evaluation, enabling a direct study of how reasoning supervision affects driving performance. Experiments show that fine-tuning VLMs on nuReasoning substantially improves driving-specific question answering, while incorporating reasoning supervision into VLA training improves planning performance even when textual reasoning outputs are disabled at inference time. These results establish nuReasoning as a foundation for evaluating and improving robust, interpretable, reasoning-driven AD systems in realistic long-tail settings.
Multi-task Just Recognizable Difference for Video Coding for Machines: Database, Model, and Coding Application
Apr 10, 2026Just Recognizable Difference (JRD) boosts coding efficiency for machine vision through visibility threshold modeling, but is currently limited to a single-task scenario. To address this issue, we propose a Multi-Task JRD (MT-JRD) dataset and an Attribute-assisted MT-JRD (AMT-JRD) model for Video Coding for Machines (VCM), enhancing both prediction accuracy and coding efficiency. First, we construct a dataset comprising 27,264 JRD annotations from machines, supporting three representative tasks including object detection, instance segmentation, and keypoint detection. Secondly, we propose the AMT-JRD prediction model, which integrates Generalized Feature Extraction Module (GFEM) and Specialized Feature Extraction Module (SFEM) to facilitate joint learning across multiple tasks. Thirdly, we innovatively incorporate object attribute information into object-wise JRD prediction through the Attribute Feature Fusion Module (AFFM), which introduces prior knowledge about object size and location. This design effectively compensates for the limitations of relying solely on image features and enhances the model's capacity to represent the perceptual mechanisms of machine vision. Finally, we apply the AMT-JRD model to VCM, where the accurately predicted JRDs are applied to reduce the coding bit rate while preserving accuracy across multiple machine vision tasks. Extensive experimental results demonstrate that AMT-JRD achieves precise and robust multi-task prediction with a mean absolute error of 3.781 and error variance of 5.332 across three tasks, outperforming the state-of-the-art single-task prediction model by 6.7% and 6.3%, respectively. Coding experiments further reveal that compared to the baseline VVC and JPEG, the AMT-JRD-based VCM improves an average of 3.861% and 7.886% Bjontegaard Delta-mean Average Precision (BD-mAP), respectively.
CI-ICM: Channel Importance-driven Learned Image Coding for Machines
Apr 07, 2026Traditional human vision-centric image compression methods are suboptimal for machine vision centric compression due to different visual properties and feature characteristics. To address this problem, we propose a Channel Importance-driven learned Image Coding for Machines (CI-ICM), aiming to maximize the performance of machine vision tasks at a given bitrate constraint. First, we propose a Channel Importance Generation (CIG) module to quantify channel importance in machine vision and develop a channel order loss to rank channels in descending order. Second, to properly allocate bitrate among feature channels, we propose a Feature Channel Grouping and Scaling (FCGS) module that non-uniformly groups the feature channels based on their importance and adjusts the dynamic range of each group. Based on FCGS, we further propose a Channel Importance-based Context (CI-CTX) module to allocate bits among feature groups and to preserve higher fidelity in critical channels. Third, to adapt to multiple machine tasks, we propose a Task-Specific Channel Adaptation (TSCA) module to adaptively enhance features for multiple downstream machine tasks. Experimental results on the COCO2017 dataset show that the proposed CI-ICM achieves BD-mAP@50:95 gains of 16.25$\%$ in object detection and 13.72$\%$ in instance segmentation over the established baseline codec. Ablation studies validate the effectiveness of each contribution, and computation complexity analysis reveals the practicability of the CI-ICM. This work establishes feature channel optimization for machine vision-centric compression, bridging the gap between image coding and machine perception.
TIC-VLA: A Think-in-Control Vision-Language-Action Model for Robot Navigation in Dynamic Environments
Feb 02, 2026Robots in dynamic, human-centric environments must follow language instructions while maintaining real-time reactive control. Vision-language-action (VLA) models offer a promising framework, but they assume temporally aligned reasoning and control, despite semantic inference being inherently delayed relative to real-time action. We introduce Think-in-Control (TIC)-VLA, a latency-aware framework that explicitly models delayed semantic reasoning during action generation. TIC-VLA defines a delayed semantic-control interface that conditions action generation on delayed vision-language semantic states and explicit latency metadata, in addition to current observations, enabling policies to compensate for asynchronous reasoning. We further propose a latency-consistent training pipeline that injects reasoning inference delays during imitation learning and online reinforcement learning, aligning training with asynchronous deployment. To support realistic evaluation, we present DynaNav, a physics-accurate, photo-realistic simulation suite for language-guided navigation in dynamic environments. Extensive experiments in simulation and on a real robot show that TIC-VLA consistently outperforms prior VLA models while maintaining robust real-time control under multi-second reasoning latency. Project website: https://ucla-mobility.github.io/TIC-VLA/
Understanding InfoNCE: Transition Probability Matrix Induced Feature Clustering
Nov 15, 2025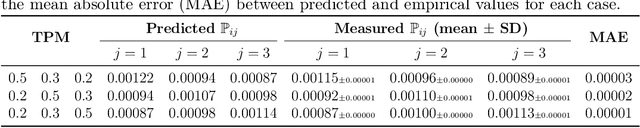
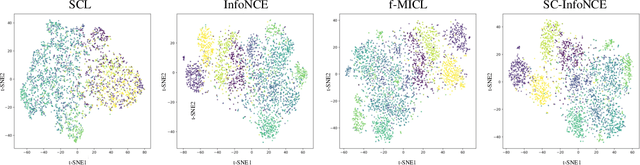
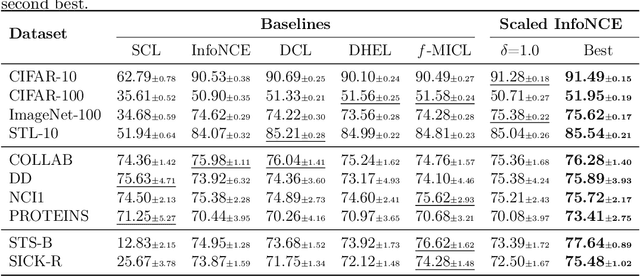

Contrastive learning has emerged as a cornerstone of unsupervised representation learning across vision, language, and graph domains, with InfoNCE as its dominant objective. Despite its empirical success, the theoretical underpinnings of InfoNCE remain limited. In this work, we introduce an explicit feature space to model augmented views of samples and a transition probability matrix to capture data augmentation dynamics. We demonstrate that InfoNCE optimizes the probability of two views sharing the same source toward a constant target defined by this matrix, naturally inducing feature clustering in the representation space. Leveraging this insight, we propose Scaled Convergence InfoNCE (SC-InfoNCE), a novel loss function that introduces a tunable convergence target to flexibly control feature similarity alignment. By scaling the target matrix, SC-InfoNCE enables flexible control over feature similarity alignment, allowing the training objective to better match the statistical properties of downstream data. Experiments on benchmark datasets, including image, graph, and text tasks, show that SC-InfoNCE consistently achieves strong and reliable performance across diverse domains.
Image Quality Assessment for Machines: Paradigm, Large-scale Database, and Models
Aug 27, 2025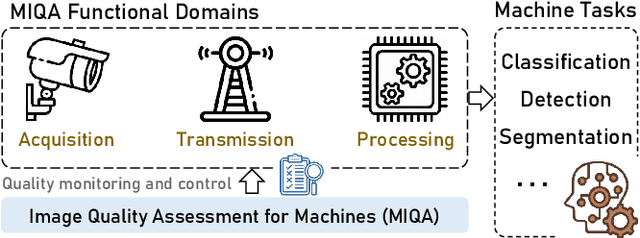

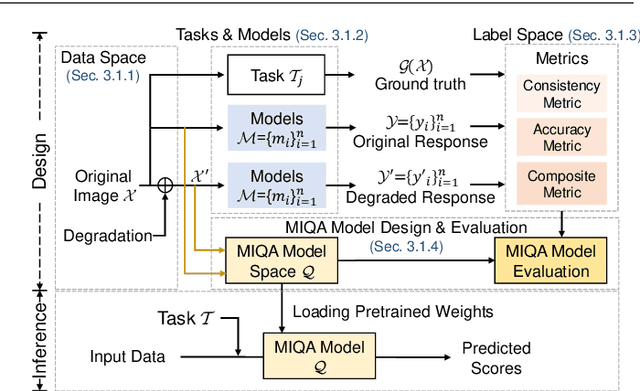
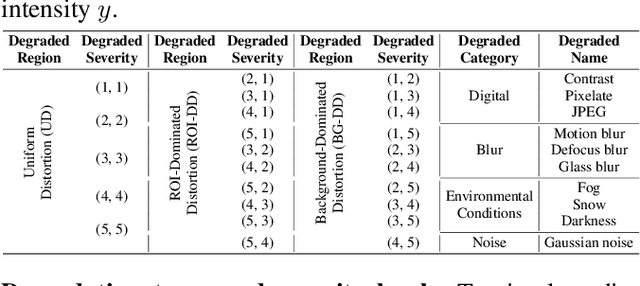
Machine vision systems (MVS) are intrinsically vulnerable to performance degradation under adverse visual conditions. To address this, we propose a machine-centric image quality assessment (MIQA) framework that quantifies the impact of image degradations on MVS performance. We establish an MIQA paradigm encompassing the end-to-end assessment workflow. To support this, we construct a machine-centric image quality database (MIQD-2.5M), comprising 2.5 million samples that capture distinctive degradation responses in both consistency and accuracy metrics, spanning 75 vision models, 250 degradation types, and three representative vision tasks. We further propose a region-aware MIQA (RA-MIQA) model to evaluate MVS visual quality through fine-grained spatial degradation analysis. Extensive experiments benchmark the proposed RA-MIQA against seven human visual system (HVS)-based IQA metrics and five retrained classical backbones. Results demonstrate RA-MIQA's superior performance in multiple dimensions, e.g., achieving SRCC gains of 13.56% on consistency and 13.37% on accuracy for image classification, while also revealing task-specific degradation sensitivities. Critically, HVS-based metrics prove inadequate for MVS quality prediction, while even specialized MIQA models struggle with background degradations, accuracy-oriented estimation, and subtle distortions. This study can advance MVS reliability and establish foundations for machine-centric image processing and optimization. The model and code are available at: https://github.com/XiaoqiWang/MIQA.
AutoVLA: A Vision-Language-Action Model for End-to-End Autonomous Driving with Adaptive Reasoning and Reinforcement Fine-Tuning
Jun 16, 2025Recent advancements in Vision-Language-Action (VLA) models have shown promise for end-to-end autonomous driving by leveraging world knowledge and reasoning capabilities. However, current VLA models often struggle with physically infeasible action outputs, complex model structures, or unnecessarily long reasoning. In this paper, we propose AutoVLA, a novel VLA model that unifies reasoning and action generation within a single autoregressive generation model for end-to-end autonomous driving. AutoVLA performs semantic reasoning and trajectory planning directly from raw visual inputs and language instructions. We tokenize continuous trajectories into discrete, feasible actions, enabling direct integration into the language model. For training, we employ supervised fine-tuning to equip the model with dual thinking modes: fast thinking (trajectory-only) and slow thinking (enhanced with chain-of-thought reasoning). To further enhance planning performance and efficiency, we introduce a reinforcement fine-tuning method based on Group Relative Policy Optimization (GRPO), reducing unnecessary reasoning in straightforward scenarios. Extensive experiments across real-world and simulated datasets and benchmarks, including nuPlan, nuScenes, Waymo, and CARLA, demonstrate the competitive performance of AutoVLA in both open-loop and closed-loop settings. Qualitative results showcase the adaptive reasoning and accurate planning capabilities of AutoVLA in diverse scenarios.
The Cell Ontology in the age of single-cell omics
Jun 10, 2025Single-cell omics technologies have transformed our understanding of cellular diversity by enabling high-resolution profiling of individual cells. However, the unprecedented scale and heterogeneity of these datasets demand robust frameworks for data integration and annotation. The Cell Ontology (CL) has emerged as a pivotal resource for achieving FAIR (Findable, Accessible, Interoperable, and Reusable) data principles by providing standardized, species-agnostic terms for canonical cell types - forming a core component of a wide range of platforms and tools. In this paper, we describe the wide variety of uses of CL in these platforms and tools and detail ongoing work to improve and extend CL content including the addition of transcriptomically defined types, working closely with major atlasing efforts including the Human Cell Atlas and the Brain Initiative Cell Atlas Network to support their needs. We cover the challenges and future plans for harmonising classical and transcriptomic cell type definitions, integrating markers and using Large Language Models (LLMs) to improve content and efficiency of CL workflows.
Seed1.5-VL Technical Report
May 11, 2025



We present Seed1.5-VL, a vision-language foundation model designed to advance general-purpose multimodal understanding and reasoning. Seed1.5-VL is composed with a 532M-parameter vision encoder and a Mixture-of-Experts (MoE) LLM of 20B active parameters. Despite its relatively compact architecture, it delivers strong performance across a wide spectrum of public VLM benchmarks and internal evaluation suites, achieving the state-of-the-art performance on 38 out of 60 public benchmarks. Moreover, in agent-centric tasks such as GUI control and gameplay, Seed1.5-VL outperforms leading multimodal systems, including OpenAI CUA and Claude 3.7. Beyond visual and video understanding, it also demonstrates strong reasoning abilities, making it particularly effective for multimodal reasoning challenges such as visual puzzles. We believe these capabilities will empower broader applications across diverse tasks. In this report, we mainly provide a comprehensive review of our experiences in building Seed1.5-VL across model design, data construction, and training at various stages, hoping that this report can inspire further research. Seed1.5-VL is now accessible at https://www.volcengine.com/ (Volcano Engine Model ID: doubao-1-5-thinking-vision-pro-250428)
StabStitch++: Unsupervised Online Video Stitching with Spatiotemporal Bidirectional Warps
May 08, 2025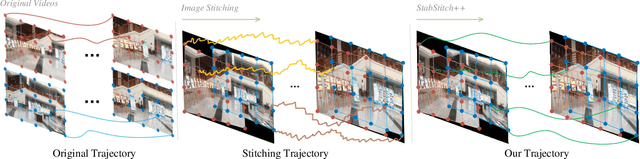
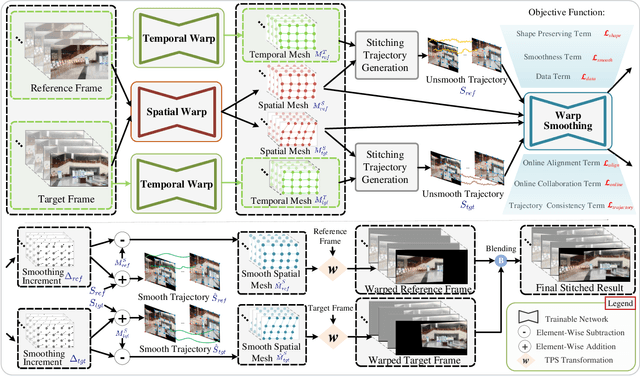
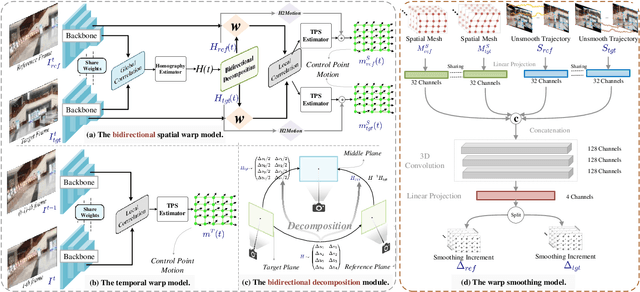
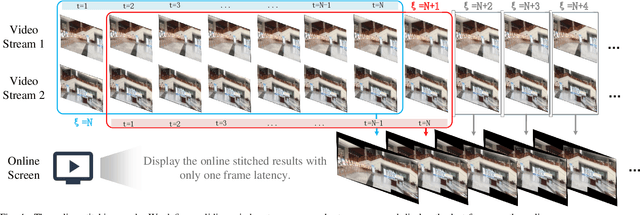
We retarget video stitching to an emerging issue, named warping shake, which unveils the temporal content shakes induced by sequentially unsmooth warps when extending image stitching to video stitching. Even if the input videos are stable, the stitched video can inevitably cause undesired warping shakes and affect the visual experience. To address this issue, we propose StabStitch++, a novel video stitching framework to realize spatial stitching and temporal stabilization with unsupervised learning simultaneously. First, different from existing learning-based image stitching solutions that typically warp one image to align with another, we suppose a virtual midplane between original image planes and project them onto it. Concretely, we design a differentiable bidirectional decomposition module to disentangle the homography transformation and incorporate it into our spatial warp, evenly spreading alignment burdens and projective distortions across two views. Then, inspired by camera paths in video stabilization, we derive the mathematical expression of stitching trajectories in video stitching by elaborately integrating spatial and temporal warps. Finally, a warp smoothing model is presented to produce stable stitched videos with a hybrid loss to simultaneously encourage content alignment, trajectory smoothness, and online collaboration. Compared with StabStitch that sacrifices alignment for stabilization, StabStitch++ makes no compromise and optimizes both of them simultaneously, especially in the online mode. To establish an evaluation benchmark and train the learning framework, we build a video stitching dataset with a rich diversity in camera motions and scenes. Experiments exhibit that StabStitch++ surpasses current solutions in stitching performance, robustness, and efficiency, offering compelling advancements in this field by building a real-time online video stitching system.