 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Agent Design: From Top-Down Workflows to Bottom-Up Skill Evolution
May 23, 2025Most LLM-based agent frameworks adopt a top-down philosophy: humans decompose tasks, define workflows, and assign agents to execute each step. While effective on benchmark-style tasks, such systems rely on designer updates and overlook agents' potential to learn from experience. Recently, Silver and Sutton(2025) envision a shift into a new era, where agents could progress from a stream of experiences. In this paper, we instantiate this vision of experience-driven learning by introducing a bottom-up agent paradigm that mirrors the human learning process. Agents acquire competence through a trial-and-reasoning mechanism-exploring, reflecting on outcomes, and abstracting skills over time. Once acquired, skills can be rapidly shared and extended, enabling continual evolution rather than static replication. As more agents are deployed, their diverse experiences accelerate this collective process, making bottom-up design especially suited for open-ended environments. We evaluate this paradigm in Slay the Spire and Civilization V, where agents perceive through raw visual inputs and act via mouse outputs, the same as human players. Using a unified, game-agnostic codebase without any game-specific prompts or privileged APIs, our bottom-up agents acquire skills entirely through autonomous interaction, demonstrating the potential of the bottom-up paradigm in complex, real-world environments. Our code is available at https://github.com/AngusDujw/Bottom-Up-Agent.
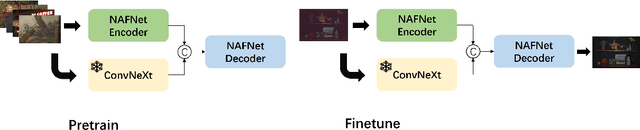
NTIRE 2025 Challenge on Real-World Face Restoration: Methods and Results
Apr 20, 2025This paper provides a review of the NTIRE 2025 challenge on real-world face restoration, highlighting the proposed solutions and the resulting outcomes. The challenge focuses on generating natural, realistic outputs while maintaining identity consistency. Its goal is to advance state-of-the-art solutions for perceptual quality and realism, without imposing constraints on computational resources or training data. The track of the challenge evaluates performance using a weighted image quality assessment (IQA) score and employs the AdaFace model as an identity checker. The competition attracted 141 registrants, with 13 teams submitting valid models, and ultimately, 10 teams achieved a valid score in the final ranking. This collaborative effort advances the performance of real-world face restoration while offering an in-depth overview of the latest trends in the field.
ChronoLLM: A Framework for Customizing Large Language Model for Digital Twins generalization based on PyChrono
Jan 07, 2025
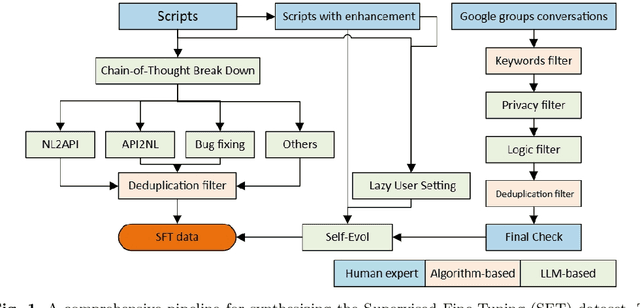

Recently, the integration of advanced simulation technologies with artificial intelligence (AI) is revolutionizing science and engineering research. ChronoLlama introduces a novel framework that customizes the open-source LLMs, specifically for code generation, paired with PyChrono for multi-physics simulations. This integration aims to automate and improve the creation of simulation scripts, thus enhancing model accuracy and efficiency. This combination harnesses the speed of AI-driven code generation with the reliability of physics-based simulations, providing a powerful tool for researchers and engineers. Empirical results indicate substantial enhancements in simulation setup speed, accuracy of the generated codes, and overall computational efficiency. ChronoLlama not only expedites the development and testing of multibody systems but also spearheads a scalable, AI-enhanced approach to managing intricate mechanical simulations. This pioneering integration of cutting-edge AI with traditional simulation platforms represents a significant leap forward in automating and optimizing design processes in engineering applications.
MIPI 2024 Challenge on Few-shot RAW Image Denoising: Methods and Results
Jun 11, 2024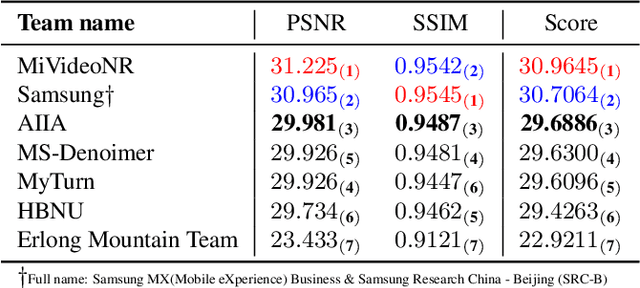
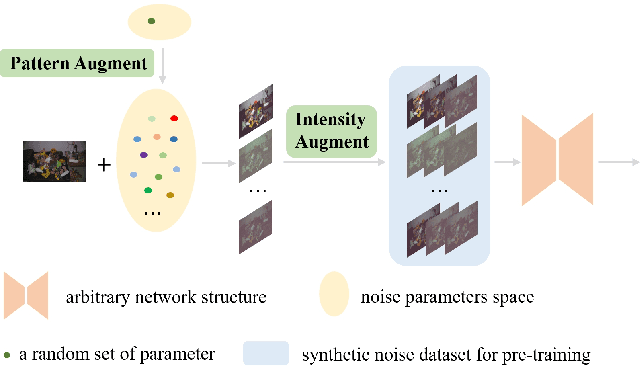

The increasing demand for computational photography and imaging on mobile platforms has led to the widespread development and integration of advanced image sensors with novel algorithms in camera systems. However, the scarcity of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). Building on the achievements of the previous MIPI Workshops held at ECCV 2022 and CVPR 2023, we introduce our third MIPI challenge including three tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Few-shot RAW Image Denoising track on MIPI 2024. In total, 165 participants were successfully registered, and 7 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art erformance on Few-shot RAW Image Denoising. More details of this challenge and the link to the dataset can be found at https://mipichallenge.org/MIPI2024.
Using a Bayesian-Inference Approach to Calibrating Models for Simulation in Robotics
May 11, 2023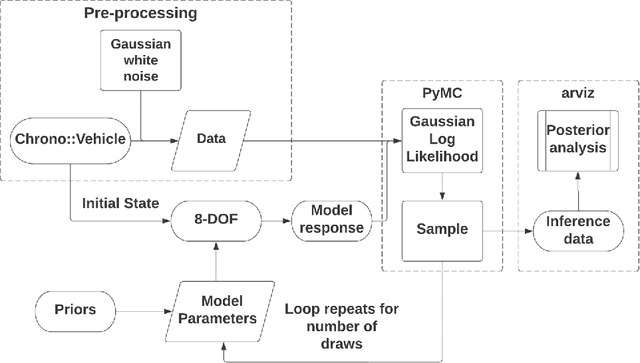
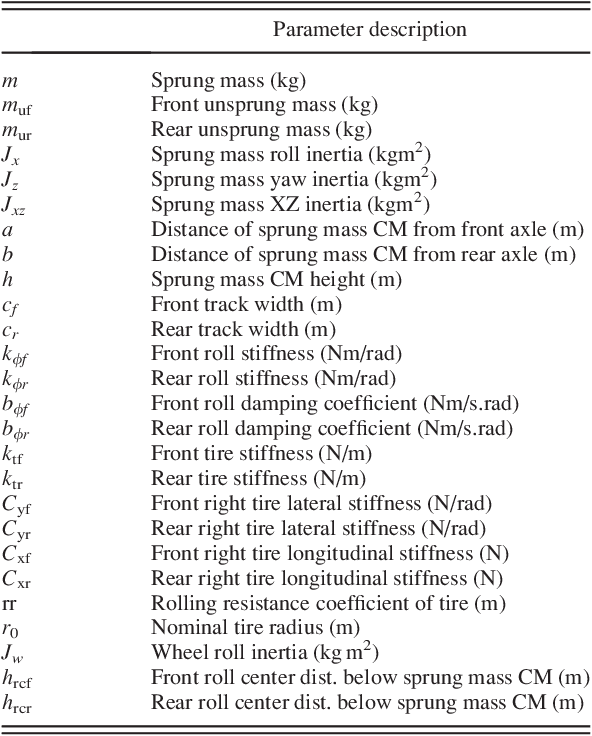
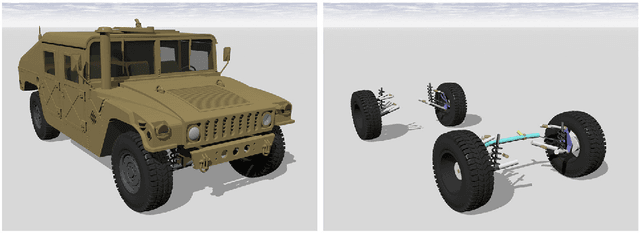
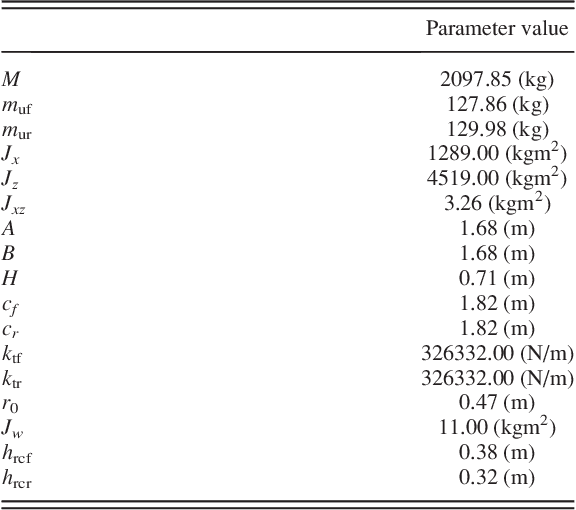
In robotics, simulation has the potential to reduce design time and costs, and lead to a more robust engineered solution and a safer development process. However, the use of simulators is predicated on the availability of good models. This contribution is concerned with improving the quality of these models via calibration, which is cast herein in a Bayesian framework. First, we discuss the Bayesian machinery involved in model calibration. Then, we demonstrate it in one example: calibration of a vehicle dynamics model that has low degree of freedom count and can be used for state estimation, model predictive control, or path planning. A high fidelity simulator is used to emulate the ``experiments'' and generate the data for the calibration. The merit of this work is not tied to a new Bayesian methodology for calibration, but to the demonstration of how the Bayesian machinery can establish connections among models in computational dynamics, even when the data in use is noisy. The software used to generate the results reported herein is available in a public repository for unfettered use and distribution.
* 19 pages, 42 figures