 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKalman-Inspired Feature Propagation for Video Face Super-Resolution
Aug 09, 2024Despite the promising progress of face image super-resolution, video face super-resolution remains relatively under-explored. Existing approaches either adapt general video super-resolution networks to face datasets or apply established face image super-resolution models independently on individual video frames. These paradigms encounter challenges either in reconstructing facial details or maintaining temporal consistency. To address these issues, we introduce a novel framework called Kalman-inspired Feature Propagation (KEEP), designed to maintain a stable face prior over time. The Kalman filtering principles offer our method a recurrent ability to use the information from previously restored frames to guide and regulate the restoration process of the current frame. Extensive experiments demonstrate the effectiveness of our method in capturing facial details consistently across video frames. Code and video demo are available at https://jnjaby.github.io/projects/KEEP.
MIPI 2024 Challenge on Few-shot RAW Image Denoising: Methods and Results
Jun 11, 2024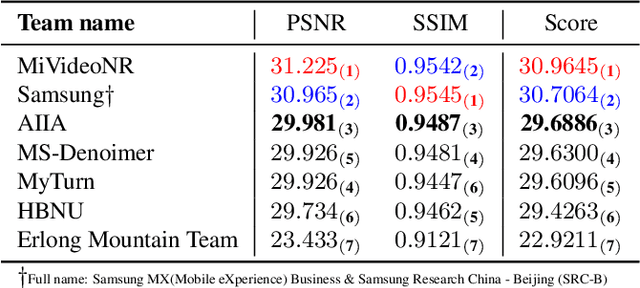

The increasing demand for computational photography and imaging on mobile platforms has led to the widespread development and integration of advanced image sensors with novel algorithms in camera systems. However, the scarcity of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). Building on the achievements of the previous MIPI Workshops held at ECCV 2022 and CVPR 2023, we introduce our third MIPI challenge including three tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Few-shot RAW Image Denoising track on MIPI 2024. In total, 165 participants were successfully registered, and 7 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art erformance on Few-shot RAW Image Denoising. More details of this challenge and the link to the dataset can be found at https://mipichallenge.org/MIPI2024.
MIPI 2024 Challenge on Demosaic for HybridEVS Camera: Methods and Results
May 08, 2024
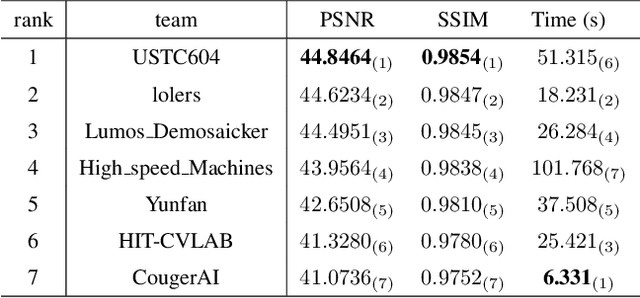
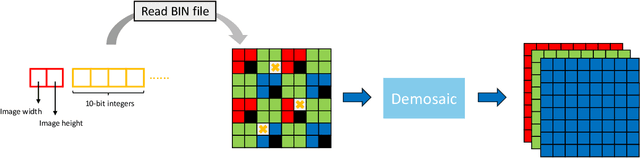
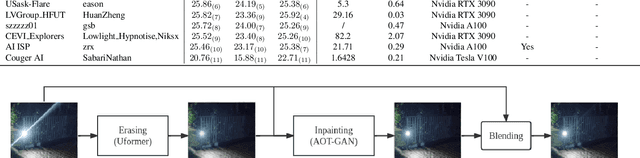
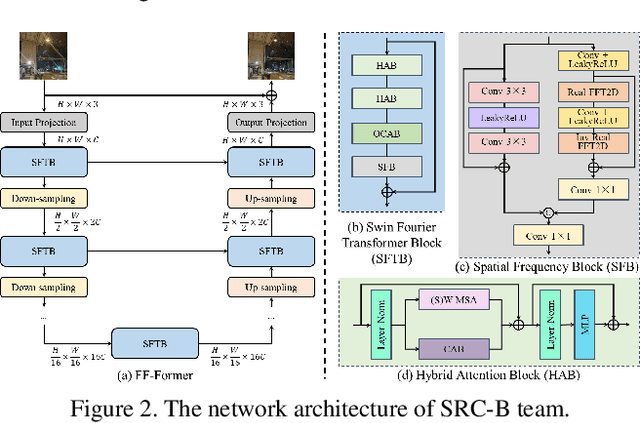
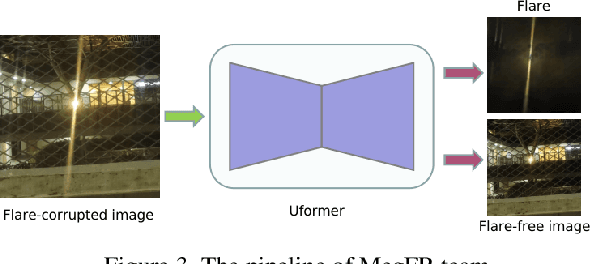
The increasing demand for computational photography and imaging on mobile platforms has led to the widespread development and integration of advanced image sensors with novel algorithms in camera systems. However, the scarcity of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). Building on the achievements of the previous MIPI Workshops held at ECCV 2022 and CVPR 2023, we introduce our third MIPI challenge including three tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Nighttime Flare Removal track on MIPI 2024. In total, 170 participants were successfully registered, and 14 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art performance on Nighttime Flare Removal. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2024/.
MIPI 2024 Challenge on Nighttime Flare Removal: Methods and Results
Apr 30, 2024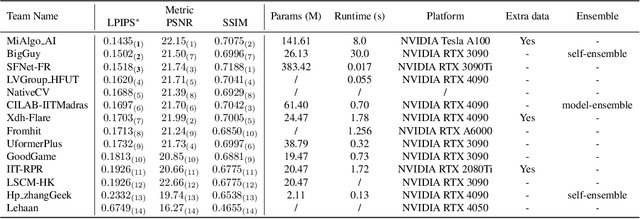
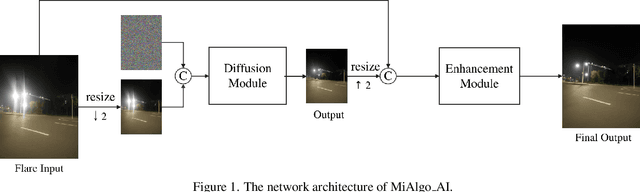
The increasing demand for computational photography and imaging on mobile platforms has led to the widespread development and integration of advanced image sensors with novel algorithms in camera systems. However, the scarcity of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). Building on the achievements of the previous MIPI Workshops held at ECCV 2022 and CVPR 2023, we introduce our third MIPI challenge including three tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Nighttime Flare Removal track on MIPI 2024. In total, 170 participants were successfully registered, and 14 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art performance on Nighttime Flare Removal. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2024/.
Flare7K++: Mixing Synthetic and Real Datasets for Nighttime Flare Removal and Beyond
Jun 08, 2023



Artificial lights commonly leave strong lens flare artifacts on the images captured at night, degrading both the visual quality and performance of vision algorithms. Existing flare removal approaches mainly focus on removing daytime flares and fail in nighttime cases. Nighttime flare removal is challenging due to the unique luminance and spectrum of artificial lights, as well as the diverse patterns and image degradation of the flares. The scarcity of the nighttime flare removal dataset constraints the research on this crucial task. In this paper, we introduce Flare7K++, the first comprehensive nighttime flare removal dataset, consisting of 962 real-captured flare images (Flare-R) and 7,000 synthetic flares (Flare7K). Compared to Flare7K, Flare7K++ is particularly effective in eliminating complicated degradation around the light source, which is intractable by using synthetic flares alone. Besides, the previous flare removal pipeline relies on the manual threshold and blur kernel settings to extract light sources, which may fail when the light sources are tiny or not overexposed. To address this issue, we additionally provide the annotations of light sources in Flare7K++ and propose a new end-to-end pipeline to preserve the light source while removing lens flares. Our dataset and pipeline offer a valuable foundation and benchmark for future investigations into nighttime flare removal studies. Extensive experiments demonstrate that Flare7K++ supplements the diversity of existing flare datasets and pushes the frontier of nighttime flare removal towards real-world scenarios.
MIPI 2023 Challenge on Nighttime Flare Removal: Methods and Results
May 23, 2023
Developing and integrating advanced image sensors with novel algorithms in camera systems are prevalent with the increasing demand for computational photography and imaging on mobile platforms. However, the lack of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). With the success of the 1st MIPI Workshop@ECCV 2022, we introduce the second MIPI challenge including four tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Nighttime Flare Removal track on MIPI 2023. In total, 120 participants were successfully registered, and 11 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art performance on Nighttime Flare Removal. A detailed description of all models developed in this challenge is provided in this paper. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2023/ .
MIPI 2023 Challenge on RGB+ToF Depth Completion: Methods and Results
Apr 27, 2023



Depth completion from RGB images and sparse Time-of-Flight (ToF) measurements is an important problem in computer vision and robotics. While traditional methods for depth completion have relied on stereo vision or structured light techniques, recent advances in deep learning have enabled more accurate and efficient completion of depth maps from RGB images and sparse ToF measurements. To evaluate the performance of different depth completion methods, we organized an RGB+sparse ToF depth completion competition. The competition aimed to encourage research in this area by providing a standardized dataset and evaluation metrics to compare the accuracy of different approaches. In this report, we present the results of the competition and analyze the strengths and weaknesses of the top-performing methods. We also discuss the implications of our findings for future research in RGB+sparse ToF depth completion. We hope that this competition and report will help to advance the state-of-the-art in this important area of research. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2023.
MIPI 2023 Challenge on RGBW Fusion: Methods and Results
Apr 24, 2023



Developing and integrating advanced image sensors with novel algorithms in camera systems are prevalent with the increasing demand for computational photography and imaging on mobile platforms. However, the lack of high-quality data for research and the rare opportunity for an in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). With the success of the 1st MIPI Workshop@ECCV 2022, we introduce the second MIPI challenge, including four tracks focusing on novel image sensors and imaging algorithms. This paper summarizes and reviews the RGBW Joint Fusion and Denoise track on MIPI 2023. In total, 69 participants were successfully registered, and 4 teams submitted results in the final testing phase. The final results are evaluated using objective metrics, including PSNR, SSIM, LPIPS, and KLD. A detailed description of the top three models developed in this challenge is provided in this paper. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2023/.
MIPI 2023 Challenge on RGBW Remosaic: Methods and Results
Apr 20, 2023



Developing and integrating advanced image sensors with novel algorithms in camera systems are prevalent with the increasing demand for computational photography and imaging on mobile platforms. However, the lack of high-quality data for research and the rare opportunity for an in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). With the success of the 1st MIPI Workshop@ECCV 2022, we introduce the second MIPI challenge, including four tracks focusing on novel image sensors and imaging algorithms. This paper summarizes and reviews the RGBW Joint Remosaic and Denoise track on MIPI 2023. In total, 81 participants were successfully registered, and 4 teams submitted results in the final testing phase. The final results are evaluated using objective metrics, including PSNR, SSIM, LPIPS, and KLD. A detailed description of the top three models developed in this challenge is provided in this paper. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2023/.
Generating Aligned Pseudo-Supervision from Non-Aligned Data for Image Restoration in Under-Display Camera
Apr 12, 2023Due to the difficulty in collecting large-scale and perfectly aligned paired training data for Under-Display Camera (UDC) image restoration, previous methods resort to monitor-based image systems or simulation-based methods, sacrificing the realness of the data and introducing domain gaps. In this work, we revisit the classic stereo setup for training data collection -- capturing two images of the same scene with one UDC and one standard camera. The key idea is to "copy" details from a high-quality reference image and "paste" them on the UDC image. While being able to generate real training pairs, this setting is susceptible to spatial misalignment due to perspective and depth of field changes. The problem is further compounded by the large domain discrepancy between the UDC and normal images, which is unique to UDC restoration. In this paper, we mitigate the non-trivial domain discrepancy and spatial misalignment through a novel Transformer-based framework that generates well-aligned yet high-quality target data for the corresponding UDC input. This is made possible through two carefully designed components, namely, the Domain Alignment Module (DAM) and Geometric Alignment Module (GAM), which encourage robust and accurate discovery of correspondence between the UDC and normal views. Extensive experiments show that high-quality and well-aligned pseudo UDC training pairs are beneficial for training a robust restoration network. Code and the dataset are available at https://github.com/jnjaby/AlignFormer.