 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIPI 2023 Challenge on Nighttime Flare Removal: Methods and Results
May 23, 2023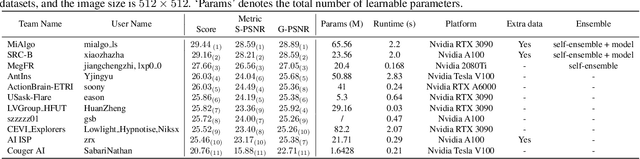
Developing and integrating advanced image sensors with novel algorithms in camera systems are prevalent with the increasing demand for computational photography and imaging on mobile platforms. However, the lack of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). With the success of the 1st MIPI Workshop@ECCV 2022, we introduce the second MIPI challenge including four tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Nighttime Flare Removal track on MIPI 2023. In total, 120 participants were successfully registered, and 11 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art performance on Nighttime Flare Removal. A detailed description of all models developed in this challenge is provided in this paper. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2023/ .
MIPI 2023 Challenge on RGB+ToF Depth Completion: Methods and Results
Apr 27, 2023



Depth completion from RGB images and sparse Time-of-Flight (ToF) measurements is an important problem in computer vision and robotics. While traditional methods for depth completion have relied on stereo vision or structured light techniques, recent advances in deep learning have enabled more accurate and efficient completion of depth maps from RGB images and sparse ToF measurements. To evaluate the performance of different depth completion methods, we organized an RGB+sparse ToF depth completion competition. The competition aimed to encourage research in this area by providing a standardized dataset and evaluation metrics to compare the accuracy of different approaches. In this report, we present the results of the competition and analyze the strengths and weaknesses of the top-performing methods. We also discuss the implications of our findings for future research in RGB+sparse ToF depth completion. We hope that this competition and report will help to advance the state-of-the-art in this important area of research. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2023.
MIPI 2023 Challenge on RGBW Fusion: Methods and Results
Apr 24, 2023



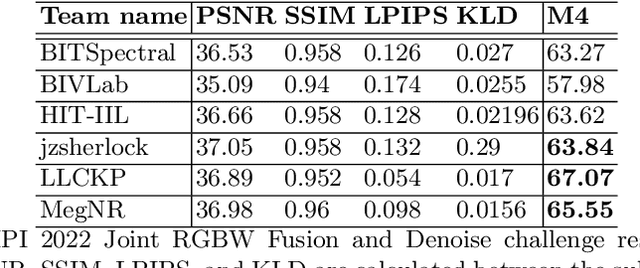
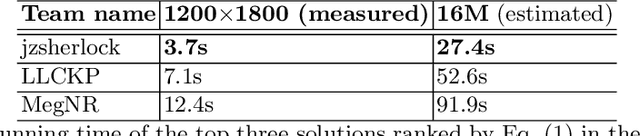
Developing and integrating advanced image sensors with novel algorithms in camera systems are prevalent with the increasing demand for computational photography and imaging on mobile platforms. However, the lack of high-quality data for research and the rare opportunity for an in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). With the success of the 1st MIPI Workshop@ECCV 2022, we introduce the second MIPI challenge, including four tracks focusing on novel image sensors and imaging algorithms. This paper summarizes and reviews the RGBW Joint Fusion and Denoise track on MIPI 2023. In total, 69 participants were successfully registered, and 4 teams submitted results in the final testing phase. The final results are evaluated using objective metrics, including PSNR, SSIM, LPIPS, and KLD. A detailed description of the top three models developed in this challenge is provided in this paper. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2023/.
MIPI 2023 Challenge on RGBW Remosaic: Methods and Results
Apr 20, 2023



Developing and integrating advanced image sensors with novel algorithms in camera systems are prevalent with the increasing demand for computational photography and imaging on mobile platforms. However, the lack of high-quality data for research and the rare opportunity for an in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). With the success of the 1st MIPI Workshop@ECCV 2022, we introduce the second MIPI challenge, including four tracks focusing on novel image sensors and imaging algorithms. This paper summarizes and reviews the RGBW Joint Remosaic and Denoise track on MIPI 2023. In total, 81 participants were successfully registered, and 4 teams submitted results in the final testing phase. The final results are evaluated using objective metrics, including PSNR, SSIM, LPIPS, and KLD. A detailed description of the top three models developed in this challenge is provided in this paper. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2023/.
MIPI 2022 Challenge on RGBW Sensor Fusion: Dataset and Report
Sep 27, 2022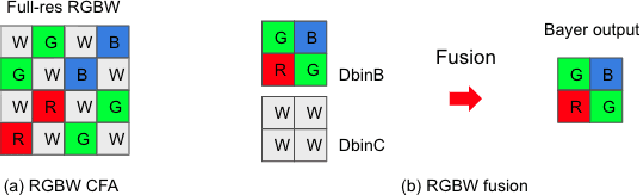

Developing and integrating advanced image sensors with novel algorithms in camera systems are prevalent with the increasing demand for computational photography and imaging on mobile platforms. However, the lack of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). To bridge the gap, we introduce the first MIPI challenge, including five tracks focusing on novel image sensors and imaging algorithms. In this paper, RGBW Joint Fusion and Denoise, one of the five tracks, working on the fusion of binning-mode RGBW to Bayer, is introduced. The participants were provided with a new dataset including 70 (training) and 15 (validation) scenes of high-quality RGBW and Bayer pairs. In addition, for each scene, RGBW of different noise levels was provided at 24dB and 42dB. All the data were captured using an RGBW sensor in both outdoor and indoor conditions. The final results are evaluated using objective metrics, including PSNR, SSIM}, LPIPS, and KLD. A detailed description of all models developed in this challenge is provided in this paper. More details of this challenge and the link to the dataset can be found at https://github.com/mipi-challenge/MIPI2022.
MIPI 2022 Challenge on RGBW Sensor Re-mosaic: Dataset and Report
Sep 15, 2022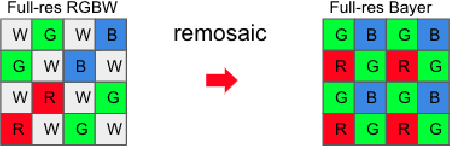



Developing and integrating advanced image sensors with novel algorithms in camera systems are prevalent with the increasing demand for computational photography and imaging on mobile platforms. However, the lack of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). To bridge the gap, we introduce the first MIPI challenge including five tracks focusing on novel image sensors and imaging algorithms. In this paper, RGBW Joint Remosaic and Denoise, one of the five tracks, working on the interpolation of RGBW CFA to Bayer at full resolution, is introduced. The participants were provided with a new dataset including 70 (training) and 15 (validation) scenes of high-quality RGBW and Bayer pairs. In addition, for each scene, RGBW of different noise levels was provided at 0dB, 24dB, and 42dB. All the data were captured using an RGBW sensor in both outdoor and indoor conditions. The final results are evaluated using objective metrics including PSNR, SSIM, LPIPS, and KLD. A detailed description of all models developed in this challenge is provided in this paper. More details of this challenge and the link to the dataset can be found at https://github.com/mipi-challenge/MIPI2022.
MIPI 2022 Challenge on Quad-Bayer Re-mosaic: Dataset and Report
Sep 15, 2022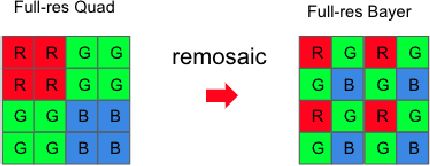
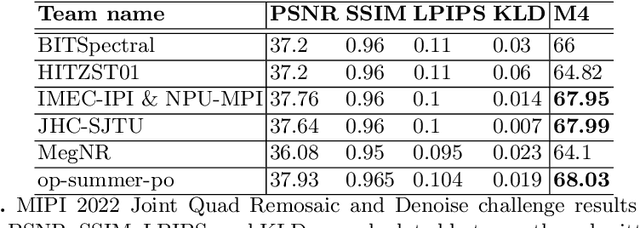


Developing and integrating advanced image sensors with novel algorithms in camera systems are prevalent with the increasing demand for computational photography and imaging on mobile platforms. However, the lack of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). To bridge the gap, we introduce the first MIPI challenge, including five tracks focusing on novel image sensors and imaging algorithms. In this paper, Quad Joint Remosaic and Denoise, one of the five tracks, working on the interpolation of Quad CFA to Bayer at full resolution, is introduced. The participants were provided a new dataset, including 70 (training) and 15 (validation) scenes of high-quality Quad and Bayer pairs. In addition, for each scene, Quad of different noise levels was provided at 0dB, 24dB, and 42dB. All the data were captured using a Quad sensor in both outdoor and indoor conditions. The final results are evaluated using objective metrics, including PSNR, SSIM, LPIPS, and KLD. A detailed description of all models developed in this challenge is provided in this paper. More details of this challenge and the link to the dataset can be found at https://github.com/mipi-challenge/MIPI2022.
MIPI 2022 Challenge on RGB+ToF Depth Completion: Dataset and Report
Sep 15, 2022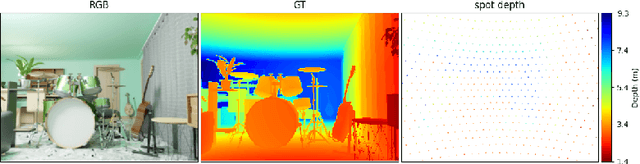
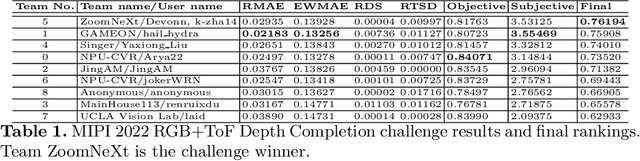
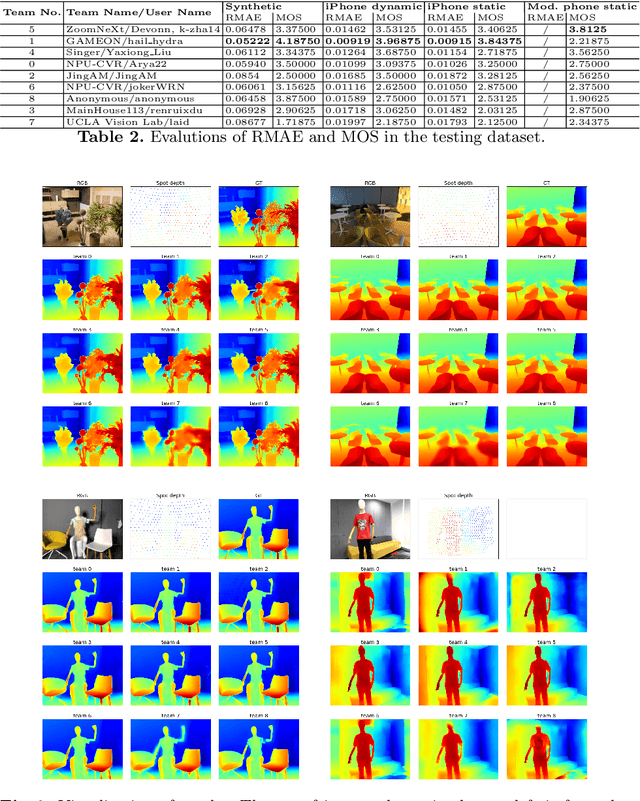
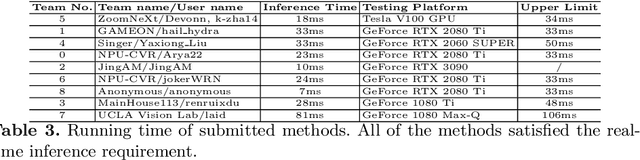
Developing and integrating advanced image sensors with novel algorithms in camera systems is prevalent with the increasing demand for computational photography and imaging on mobile platforms. However, the lack of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). To bridge the gap, we introduce the first MIPI challenge including five tracks focusing on novel image sensors and imaging algorithms. In this paper, RGB+ToF Depth Completion, one of the five tracks, working on the fusion of RGB sensor and ToF sensor (with spot illumination) is introduced. The participants were provided with a new dataset called TetrasRGBD, which contains 18k pairs of high-quality synthetic RGB+Depth training data and 2.3k pairs of testing data from mixed sources. All the data are collected in an indoor scenario. We require that the running time of all methods should be real-time on desktop GPUs. The final results are evaluated using objective metrics and Mean Opinion Score (MOS) subjectively. A detailed description of all models developed in this challenge is provided in this paper. More details of this challenge and the link to the dataset can be found at https://github.com/mipi-challenge/MIPI2022.
MIPI 2022 Challenge on Under-Display Camera Image Restoration: Methods and Results
Sep 15, 2022

Developing and integrating advanced image sensors with novel algorithms in camera systems are prevalent with the increasing demand for computational photography and imaging on mobile platforms. However, the lack of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). To bridge the gap, we introduce the first MIPI challenge including five tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Under-Display Camera (UDC) Image Restoration track on MIPI 2022. In total, 167 participants were successfully registered, and 19 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art performance on Under-Display Camera Image Restoration. A detailed description of all models developed in this challenge is provided in this paper. More details of this challenge and the link to the dataset can be found at https://github.com/mipi-challenge/MIPI2022.