 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfinite-World: Scaling Interactive World Models to 1000-Frame Horizons via Pose-Free Hierarchical Memory
Feb 03, 2026We propose Infinite-World, a robust interactive world model capable of maintaining coherent visual memory over 1000+ frames in complex real-world environments. While existing world models can be efficiently optimized on synthetic data with perfect ground-truth, they lack an effective training paradigm for real-world videos due to noisy pose estimations and the scarcity of viewpoint revisits. To bridge this gap, we first introduce a Hierarchical Pose-free Memory Compressor (HPMC) that recursively distills historical latents into a fixed-budget representation. By jointly optimizing the compressor with the generative backbone, HPMC enables the model to autonomously anchor generations in the distant past with bounded computational cost, eliminating the need for explicit geometric priors. Second, we propose an Uncertainty-aware Action Labeling module that discretizes continuous motion into a tri-state logic. This strategy maximizes the utilization of raw video data while shielding the deterministic action space from being corrupted by noisy trajectories, ensuring robust action-response learning. Furthermore, guided by insights from a pilot toy study, we employ a Revisit-Dense Finetuning Strategy using a compact, 30-minute dataset to efficiently activate the model's long-range loop-closure capabilities. Extensive experiments, including objective metrics and user studies, demonstrate that Infinite-World achieves superior performance in visual quality, action controllability, and spatial consistency.
MarkCleaner: High-Fidelity Watermark Removal via Imperceptible Micro-Geometric Perturbation
Feb 02, 2026Semantic watermarks exhibit strong robustness against conventional image-space attacks. In this work, we show that such robustness does not survive under micro-geometric perturbations: spatial displacements can remove watermarks by breaking the phase alignment. Motivated by this observation, we introduce MarkCleaner, a watermark removal framework that avoids semantic drift caused by regeneration-based watermark removal. Specifically, MarkCleaner is trained with micro-geometry-perturbed supervision, which encourages the model to separate semantic content from strict spatial alignment and enables robust reconstruction under subtle geometric displacements. The framework adopts a mask-guided encoder that learns explicit spatial representations and a 2D Gaussian Splatting-based decoder that explicitly parameterizes geometric perturbations while preserving semantic content. Extensive experiments demonstrate that MarkCleaner achieves superior performance in both watermark removal effectiveness and visual fidelity, while enabling efficient real-time inference. Our code will be made available upon acceptance.
Joint Semantic and Rendering Enhancements in 3D Gaussian Modeling with Anisotropic Local Encoding
Jan 05, 2026Recent works propose extending 3DGS with semantic feature vectors for simultaneous semantic segmentation and image rendering. However, these methods often treat the semantic and rendering branches separately, relying solely on 2D supervision while ignoring the 3D Gaussian geometry. Moreover, current adaptive strategies adapt the Gaussian set depending solely on rendering gradients, which can be insufficient in subtle or textureless regions. In this work, we propose a joint enhancement framework for 3D semantic Gaussian modeling that synergizes both semantic and rendering branches. Firstly, unlike conventional point cloud shape encoding, we introduce an anisotropic 3D Gaussian Chebyshev descriptor using the Laplace-Beltrami operator to capture fine-grained 3D shape details, thereby distinguishing objects with similar appearances and reducing reliance on potentially noisy 2D guidance. In addition, without relying solely on rendering gradient, we adaptively adjust Gaussian allocation and spherical harmonics with local semantic and shape signals, enhancing rendering efficiency through selective resource allocation. Finally, we employ a cross-scene knowledge transfer module to continuously update learned shape patterns, enabling faster convergence and robust representations without relearning shape information from scratch for each new scene. Experiments on multiple datasets demonstrate improvements in segmentation accuracy and rendering quality while maintaining high rendering frame rates.
PerTouch: VLM-Driven Agent for Personalized and Semantic Image Retouching
Nov 17, 2025Image retouching aims to enhance visual quality while aligning with users' personalized aesthetic preferences. To address the challenge of balancing controllability and subjectivity, we propose a unified diffusion-based image retouching framework called PerTouch. Our method supports semantic-level image retouching while maintaining global aesthetics. Using parameter maps containing attribute values in specific semantic regions as input, PerTouch constructs an explicit parameter-to-image mapping for fine-grained image retouching. To improve semantic boundary perception, we introduce semantic replacement and parameter perturbation mechanisms in the training process. To connect natural language instructions with visual control, we develop a VLM-driven agent that can handle both strong and weak user instructions. Equipped with mechanisms of feedback-driven rethinking and scene-aware memory, PerTouch better aligns with user intent and captures long-term preferences. Extensive experiments demonstrate each component's effectiveness and the superior performance of PerTouch in personalized image retouching. Code is available at: https://github.com/Auroral703/PerTouch.
UltraLED: Learning to See Everything in Ultra-High Dynamic Range Scenes
Oct 09, 2025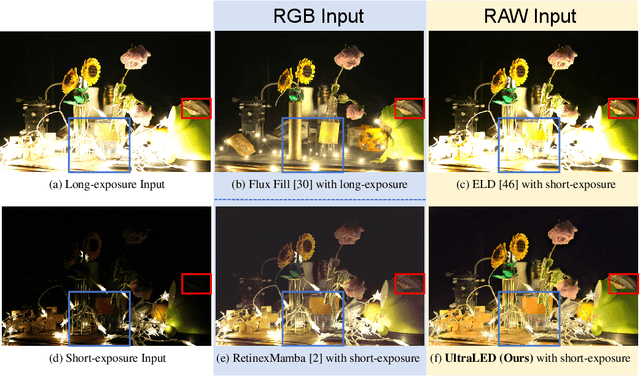
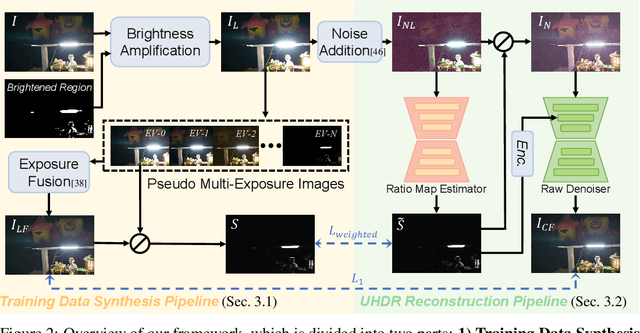

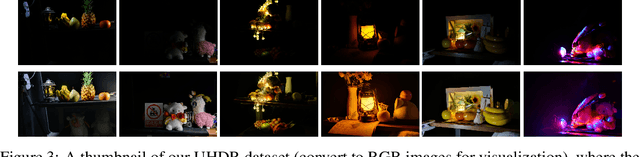
Ultra-high dynamic range (UHDR) scenes exhibit significant exposure disparities between bright and dark regions. Such conditions are commonly encountered in nighttime scenes with light sources. Even with standard exposure settings, a bimodal intensity distribution with boundary peaks often emerges, making it difficult to preserve both highlight and shadow details simultaneously. RGB-based bracketing methods can capture details at both ends using short-long exposure pairs, but are susceptible to misalignment and ghosting artifacts. We found that a short-exposure image already retains sufficient highlight detail. The main challenge of UHDR reconstruction lies in denoising and recovering information in dark regions. In comparison to the RGB images, RAW images, thanks to their higher bit depth and more predictable noise characteristics, offer greater potential for addressing this challenge. This raises a key question: can we learn to see everything in UHDR scenes using only a single short-exposure RAW image? In this study, we rely solely on a single short-exposure frame, which inherently avoids ghosting and motion blur, making it particularly robust in dynamic scenes. To achieve that, we introduce UltraLED, a two-stage framework that performs exposure correction via a ratio map to balance dynamic range, followed by a brightness-aware RAW denoiser to enhance detail recovery in dark regions. To support this setting, we design a 9-stop bracketing pipeline to synthesize realistic UHDR images and contribute a corresponding dataset based on diverse scenes, using only the shortest exposure as input for reconstruction. Extensive experiments show that UltraLED significantly outperforms existing single-frame approaches. Our code and dataset are made publicly available at https://srameo.github.io/projects/ultraled.
ViDA-UGC: Detailed Image Quality Analysis via Visual Distortion Assessment for UGC Images
Aug 18, 2025Recent advances in Multimodal Large Language Models (MLLMs) have introduced a paradigm shift for Image Quality Assessment (IQA) from unexplainable image quality scoring to explainable IQA, demonstrating practical applications like quality control and optimization guidance. However, current explainable IQA methods not only inadequately use the same distortion criteria to evaluate both User-Generated Content (UGC) and AI-Generated Content (AIGC) images, but also lack detailed quality analysis for monitoring image quality and guiding image restoration. In this study, we establish the first large-scale Visual Distortion Assessment Instruction Tuning Dataset for UGC images, termed ViDA-UGC, which comprises 11K images with fine-grained quality grounding, detailed quality perception, and reasoning quality description data. This dataset is constructed through a distortion-oriented pipeline, which involves human subject annotation and a Chain-of-Thought (CoT) assessment framework. This framework guides GPT-4o to generate quality descriptions by identifying and analyzing UGC distortions, which helps capturing rich low-level visual features that inherently correlate with distortion patterns. Moreover, we carefully select 476 images with corresponding 6,149 question answer pairs from ViDA-UGC and invite a professional team to ensure the accuracy and quality of GPT-generated information. The selected and revised data further contribute to the first UGC distortion assessment benchmark, termed ViDA-UGC-Bench. Experimental results demonstrate the effectiveness of the ViDA-UGC and CoT framework for consistently enhancing various image quality analysis abilities across multiple base MLLMs on ViDA-UGC-Bench and Q-Bench, even surpassing GPT-4o.
Tree-Mamba: A Tree-Aware Mamba for Underwater Monocular Depth Estimation
Jul 10, 2025Underwater Monocular Depth Estimation (UMDE) is a critical task that aims to estimate high-precision depth maps from underwater degraded images caused by light absorption and scattering effects in marine environments. Recently, Mamba-based methods have achieved promising performance across various vision tasks; however, they struggle with the UMDE task because their inflexible state scanning strategies fail to model the structural features of underwater images effectively. Meanwhile, existing UMDE datasets usually contain unreliable depth labels, leading to incorrect object-depth relationships between underwater images and their corresponding depth maps. To overcome these limitations, we develop a novel tree-aware Mamba method, dubbed Tree-Mamba, for estimating accurate monocular depth maps from underwater degraded images. Specifically, we propose a tree-aware scanning strategy that adaptively constructs a minimum spanning tree based on feature similarity. The spatial topological features among the tree nodes are then flexibly aggregated through bottom-up and top-down traversals, enabling stronger multi-scale feature representation capabilities. Moreover, we construct an underwater depth estimation benchmark (called BlueDepth), which consists of 38,162 underwater image pairs with reliable depth labels. This benchmark serves as a foundational dataset for training existing deep learning-based UMDE methods to learn accurate object-depth relationships. Extensive experiments demonstrate the superiority of the proposed Tree-Mamba over several leading methods in both qualitative results and quantitative evaluations with competitive computational efficiency. Code and dataset will be available at https://wyjgr.github.io/Tree-Mamba.html.
Incorporating Uncertainty-Guided and Top-k Codebook Matching for Real-World Blind Image Super-Resolution
Jun 09, 2025Recent advancements in codebook-based real image super-resolution (SR) have shown promising results in real-world applications. The core idea involves matching high-quality image features from a codebook based on low-resolution (LR) image features. However, existing methods face two major challenges: inaccurate feature matching with the codebook and poor texture detail reconstruction. To address these issues, we propose a novel Uncertainty-Guided and Top-k Codebook Matching SR (UGTSR) framework, which incorporates three key components: (1) an uncertainty learning mechanism that guides the model to focus on texture-rich regions, (2) a Top-k feature matching strategy that enhances feature matching accuracy by fusing multiple candidate features, and (3) an Align-Attention module that enhances the alignment of information between LR and HR features. Experimental results demonstrate significant improvements in texture realism and reconstruction fidelity compared to existing methods. We will release the code upon formal publication.
A Systematic Investigation on Deep Learning-Based Omnidirectional Image and Video Super-Resolution
Jun 07, 2025Omnidirectional image and video super-resolution is a crucial research topic in low-level vision, playing an essential role in virtual reality and augmented reality applications. Its goal is to reconstruct high-resolution images or video frames from low-resolution inputs, thereby enhancing detail preservation and enabling more accurate scene analysis and interpretation. In recent years, numerous innovative and effective approaches have been proposed, predominantly based on deep learning techniques, involving diverse network architectures, loss functions, projection strategies, and training datasets. This paper presents a systematic review of recent progress in omnidirectional image and video super-resolution, focusing on deep learning-based methods. Given that existing datasets predominantly rely on synthetic degradation and fall short in capturing real-world distortions, we introduce a new dataset, 360Insta, that comprises authentically degraded omnidirectional images and videos collected under diverse conditions, including varying lighting, motion, and exposure settings. This dataset addresses a critical gap in current omnidirectional benchmarks and enables more robust evaluation of the generalization capabilities of omnidirectional super-resolution methods. We conduct comprehensive qualitative and quantitative evaluations of existing methods on both public datasets and our proposed dataset. Furthermore, we provide a systematic overview of the current status of research and discuss promising directions for future exploration. All datasets, methods, and evaluation metrics introduced in this work are publicly available and will be regularly updated. Project page: https://github.com/nqian1/Survey-on-ODISR-and-ODVSR.
3D-UIR: 3D Gaussian for Underwater 3D Scene Reconstruction via Physics Based Appearance-Medium Decoupling
May 29, 2025Novel view synthesis for underwater scene reconstruction presents unique challenges due to complex light-media interactions. Optical scattering and absorption in water body bring inhomogeneous medium attenuation interference that disrupts conventional volume rendering assumptions of uniform propagation medium. While 3D Gaussian Splatting (3DGS) offers real-time rendering capabilities, it struggles with underwater inhomogeneous environments where scattering media introduce artifacts and inconsistent appearance. In this study, we propose a physics-based framework that disentangles object appearance from water medium effects through tailored Gaussian modeling. Our approach introduces appearance embeddings, which are explicit medium representations for backscatter and attenuation, enhancing scene consistency. In addition, we propose a distance-guided optimization strategy that leverages pseudo-depth maps as supervision with depth regularization and scale penalty terms to improve geometric fidelity. By integrating the proposed appearance and medium modeling components via an underwater imaging model, our approach achieves both high-quality novel view synthesis and physically accurate scene restoration. Experiments demonstrate our significant improvements in rendering quality and restoration accuracy over existing methods. The project page is available at https://bilityniu.github.io/3D-UIR.