 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMSC-Bench: Benchmarking and Analyzing Multi-Sensor Corruption for Driving Perception
Jan 02, 2025



Multi-sensor fusion models play a crucial role in autonomous driving perception, particularly in tasks like 3D object detection and HD map construction. These models provide essential and comprehensive static environmental information for autonomous driving systems. While camera-LiDAR fusion methods have shown promising results by integrating data from both modalities, they often depend on complete sensor inputs. This reliance can lead to low robustness and potential failures when sensors are corrupted or missing, raising significant safety concerns. To tackle this challenge, we introduce the Multi-Sensor Corruption Benchmark (MSC-Bench), the first comprehensive benchmark aimed at evaluating the robustness of multi-sensor autonomous driving perception models against various sensor corruptions. Our benchmark includes 16 combinations of corruption types that disrupt both camera and LiDAR inputs, either individually or concurrently. Extensive evaluations of six 3D object detection models and four HD map construction models reveal substantial performance degradation under adverse weather conditions and sensor failures, underscoring critical safety issues. The benchmark toolkit and affiliated code and model checkpoints have been made publicly accessible.
MIPI 2024 Challenge on Nighttime Flare Removal: Methods and Results
Apr 30, 2024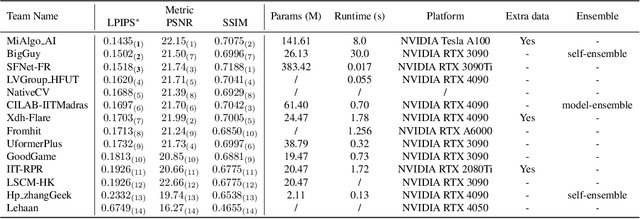
The increasing demand for computational photography and imaging on mobile platforms has led to the widespread development and integration of advanced image sensors with novel algorithms in camera systems. However, the scarcity of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). Building on the achievements of the previous MIPI Workshops held at ECCV 2022 and CVPR 2023, we introduce our third MIPI challenge including three tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Nighttime Flare Removal track on MIPI 2024. In total, 170 participants were successfully registered, and 14 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art performance on Nighttime Flare Removal. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2024/.