 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniStitch: Unifying Semantic and Geometric Features for Image Stitching
Mar 11, 2026Traditional image stitching methods estimate warps from hand-crafted geometric features, whereas recent learning-based solutions leverage semantic features from neural networks instead. These two lines of research have largely diverged along separate evolution, with virtually no meaningful convergence to date. In this paper, we take a pioneering step to bridge this gap by unifying semantic and geometric features with UniStitch, a unified image stitching framework from multimodal features. To align discrete geometric features (i.e., keypoint) with continuous semantic feature maps, we present a Neural Point Transformer (NPT) module, which transforms unordered, sparse 1D geometric keypoints into ordered, dense 2D semantic maps. Then, to integrate the advantages of both representations, an Adaptive Mixture of Experts (AMoE) module is designed to fuse geometric and semantic representations. It dynamically shifts focus toward more reliable features during the fusion process, allowing the model to handle complex scenes, especially when either modality might be compromised. The fused representation can be adopted into common deep stitching pipelines, delivering significant performance gains over any single feature. Experiments show that UniStitch outperforms existing state-of-the-art methods with a large margin, paving the way for a unified paradigm between traditional and learning-based image stitching.
Geometry-Guided Reinforcement Learning for Multi-view Consistent 3D Scene Editing
Mar 03, 2026Leveraging the priors of 2D diffusion models for 3D editing has emerged as a promising paradigm. However, maintaining multi-view consistency in edited results remains challenging, and the extreme scarcity of 3D-consistent editing paired data renders supervised fine-tuning (SFT), the most effective training strategy for editing tasks, infeasible. In this paper, we observe that, while generating multi-view consistent 3D content is highly challenging, verifying 3D consistency is tractable, naturally positioning reinforcement learning (RL) as a feasible solution. Motivated by this, we propose \textbf{RL3DEdit}, a single-pass framework driven by RL optimization with novel rewards derived from the 3D foundation model, VGGT. Specifically, we leverage VGGT's robust priors learned from massive real-world data, feed the edited images, and utilize the output confidence maps and pose estimation errors as reward signals, effectively anchoring the 2D editing priors onto a 3D-consistent manifold via RL. Extensive experiments demonstrate that RL3DEdit achieves stable multi-view consistency and outperforms state-of-the-art methods in editing quality with high efficiency. To promote the development of 3D editing, we will release the code and model.
Advancing Real-World Parking Slot Detection with Large-Scale Dataset and Semi-Supervised Baseline
Sep 16, 2025As automatic parking systems evolve, the accurate detection of parking slots has become increasingly critical. This study focuses on parking slot detection using surround-view cameras, which offer a comprehensive bird's-eye view of the parking environment. However, the current datasets are limited in scale, and the scenes they contain are seldom disrupted by real-world noise (e.g., light, occlusion, etc.). Moreover, manual data annotation is prone to errors and omissions due to the complexity of real-world conditions, significantly increasing the cost of annotating large-scale datasets. To address these issues, we first construct a large-scale parking slot detection dataset (named CRPS-D), which includes various lighting distributions, diverse weather conditions, and challenging parking slot variants. Compared with existing datasets, the proposed dataset boasts the largest data scale and consists of a higher density of parking slots, particularly featuring more slanted parking slots. Additionally, we develop a semi-supervised baseline for parking slot detection, termed SS-PSD, to further improve performance by exploiting unlabeled data. To our knowledge, this is the first semi-supervised approach in parking slot detection, which is built on the teacher-student model with confidence-guided mask consistency and adaptive feature perturbation. Experimental results demonstrate the superiority of SS-PSD over the existing state-of-the-art (SoTA) solutions on both the proposed dataset and the existing dataset. Particularly, the more unlabeled data there is, the more significant the gains brought by our semi-supervised scheme. The relevant source codes and the dataset have been made publicly available at https://github.com/zzh362/CRPS-D.
From Editor to Dense Geometry Estimator
Sep 04, 2025
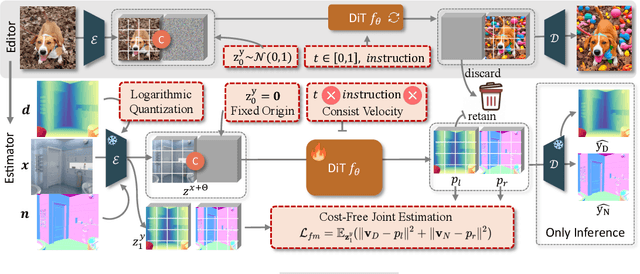


Leveraging visual priors from pre-trained text-to-image (T2I) generative models has shown success in dense prediction. However, dense prediction is inherently an image-to-image task, suggesting that image editing models, rather than T2I generative models, may be a more suitable foundation for fine-tuning. Motivated by this, we conduct a systematic analysis of the fine-tuning behaviors of both editors and generators for dense geometry estimation. Our findings show that editing models possess inherent structural priors, which enable them to converge more stably by ``refining" their innate features, and ultimately achieve higher performance than their generative counterparts. Based on these findings, we introduce \textbf{FE2E}, a framework that pioneeringly adapts an advanced editing model based on Diffusion Transformer (DiT) architecture for dense geometry prediction. Specifically, to tailor the editor for this deterministic task, we reformulate the editor's original flow matching loss into the ``consistent velocity" training objective. And we use logarithmic quantization to resolve the precision conflict between the editor's native BFloat16 format and the high precision demand of our tasks. Additionally, we leverage the DiT's global attention for a cost-free joint estimation of depth and normals in a single forward pass, enabling their supervisory signals to mutually enhance each other. Without scaling up the training data, FE2E achieves impressive performance improvements in zero-shot monocular depth and normal estimation across multiple datasets. Notably, it achieves over 35\% performance gains on the ETH3D dataset and outperforms the DepthAnything series, which is trained on 100$\times$ data. The project page can be accessed \href{https://amap-ml.github.io/FE2E/}{here}.
StabStitch++: Unsupervised Online Video Stitching with Spatiotemporal Bidirectional Warps
May 08, 2025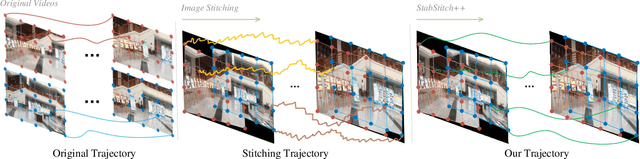
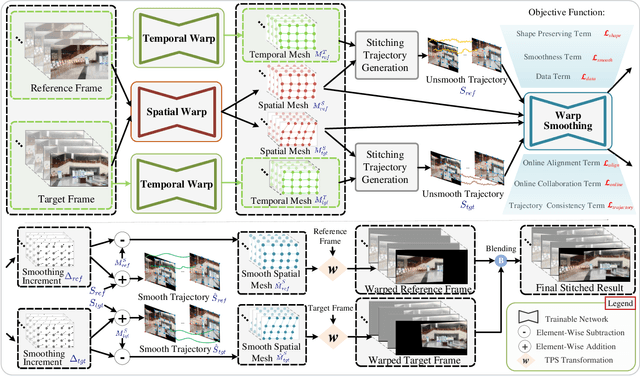
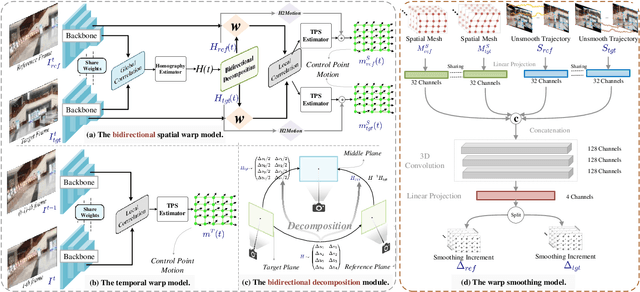
We retarget video stitching to an emerging issue, named warping shake, which unveils the temporal content shakes induced by sequentially unsmooth warps when extending image stitching to video stitching. Even if the input videos are stable, the stitched video can inevitably cause undesired warping shakes and affect the visual experience. To address this issue, we propose StabStitch++, a novel video stitching framework to realize spatial stitching and temporal stabilization with unsupervised learning simultaneously. First, different from existing learning-based image stitching solutions that typically warp one image to align with another, we suppose a virtual midplane between original image planes and project them onto it. Concretely, we design a differentiable bidirectional decomposition module to disentangle the homography transformation and incorporate it into our spatial warp, evenly spreading alignment burdens and projective distortions across two views. Then, inspired by camera paths in video stabilization, we derive the mathematical expression of stitching trajectories in video stitching by elaborately integrating spatial and temporal warps. Finally, a warp smoothing model is presented to produce stable stitched videos with a hybrid loss to simultaneously encourage content alignment, trajectory smoothness, and online collaboration. Compared with StabStitch that sacrifices alignment for stabilization, StabStitch++ makes no compromise and optimizes both of them simultaneously, especially in the online mode. To establish an evaluation benchmark and train the learning framework, we build a video stitching dataset with a rich diversity in camera motions and scenes. Experiments exhibit that StabStitch++ surpasses current solutions in stitching performance, robustness, and efficiency, offering compelling advancements in this field by building a real-time online video stitching system.
You Need a Transition Plane: Bridging Continuous Panoramic 3D Reconstruction with Perspective Gaussian Splatting
Apr 12, 2025Recently, reconstructing scenes from a single panoramic image using advanced 3D Gaussian Splatting (3DGS) techniques has attracted growing interest. Panoramic images offer a 360$\times$ 180 field of view (FoV), capturing the entire scene in a single shot. However, panoramic images introduce severe distortion, making it challenging to render 3D Gaussians into 2D distorted equirectangular space directly. Converting equirectangular images to cubemap projections partially alleviates this problem but introduces new challenges, such as projection distortion and discontinuities across cube-face boundaries. To address these limitations, we present a novel framework, named TPGS, to bridge continuous panoramic 3D scene reconstruction with perspective Gaussian splatting. Firstly, we introduce a Transition Plane between adjacent cube faces to enable smoother transitions in splatting directions and mitigate optimization ambiguity in the boundary region. Moreover, an intra-to-inter face optimization strategy is proposed to enhance local details and restore visual consistency across cube-face boundaries. Specifically, we optimize 3D Gaussians within individual cube faces and then fine-tune them in the stitched panoramic space. Additionally, we introduce a spherical sampling technique to eliminate visible stitching seams. Extensive experiments on indoor and outdoor, egocentric, and roaming benchmark datasets demonstrate that our approach outperforms existing state-of-the-art methods. Code and models will be available at https://github.com/zhijieshen-bjtu/TPGS.
Beyond Wide-Angle Images: Unsupervised Video Portrait Correction via Spatiotemporal Diffusion Adaptation
Apr 01, 2025Wide-angle cameras, despite their popularity for content creation, suffer from distortion-induced facial stretching-especially at the edge of the lens-which degrades visual appeal. To address this issue, we propose an image portrait correction framework using diffusion models named ImagePD. It integrates the long-range awareness of transformer and multi-step denoising of diffusion models into a unified framework, achieving global structural robustness and local detail refinement. Besides, considering the high cost of obtaining video labels, we then repurpose ImagePD for unlabeled wide-angle videos (termed VideoPD), by spatiotemporal diffusion adaption with spatial consistency and temporal smoothness constraints. For the former, we encourage the denoised image to approximate pseudo labels following the wide-angle distortion distribution pattern, while for the latter, we derive rectification trajectories with backward optical flows and smooth them. Compared with ImagePD, VideoPD maintains high-quality facial corrections in space and mitigates the potential temporal shakes sequentially. Finally, to establish an evaluation benchmark and train the framework, we establish a video portrait dataset with a large diversity in people number, lighting conditions, and background. Experiments demonstrate that the proposed methods outperform existing solutions quantitatively and qualitatively, contributing to high-fidelity wide-angle videos with stable and natural portraits. The codes and dataset will be available.
TransVFC: A Transformable Video Feature Compression Framework for Machines
Mar 31, 2025Nowadays, more and more video transmissions primarily aim at downstream machine vision tasks rather than humans. While widely deployed Human Visual System (HVS) oriented video coding standards like H.265/HEVC and H.264/AVC are efficient, they are not the optimal approaches for Video Coding for Machines (VCM) scenarios, leading to unnecessary bitrate expenditure. The academic and technical exploration within the VCM domain has led to the development of several strategies, and yet, conspicuous limitations remain in their adaptability for multi-task scenarios. To address the challenge, we propose a Transformable Video Feature Compression (TransVFC) framework. It offers a compress-then-transfer solution and includes a video feature codec and Feature Space Transform (FST) modules. In particular, the temporal redundancy of video features is squeezed by the codec through the scheme-based inter-prediction module. Then, the codec implements perception-guided conditional coding to minimize spatial redundancy and help the reconstructed features align with downstream machine perception.After that, the reconstructed features are transferred to new feature spaces for diverse downstream tasks by FST modules. To accommodate a new downstream task, it only requires training one lightweight FST module, avoiding retraining and redeploying the upstream codec and downstream task networks. Experiments show that TransVFC achieves high rate-task performance for diverse tasks of different granularities. We expect our work can provide valuable insights for video feature compression in multi-task scenarios. The codes are at https://github.com/Ws-Syx/TransVFC.
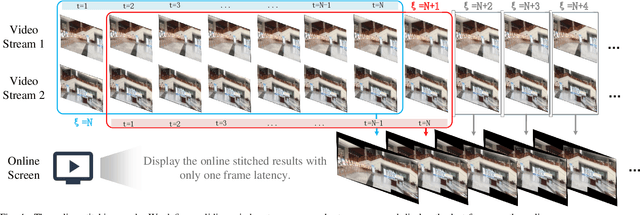
Jasmine: Harnessing Diffusion Prior for Self-supervised Depth Estimation
Mar 20, 2025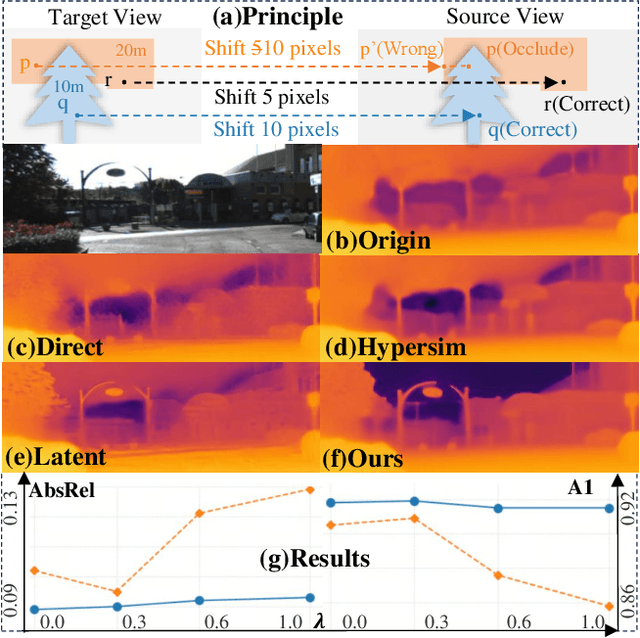
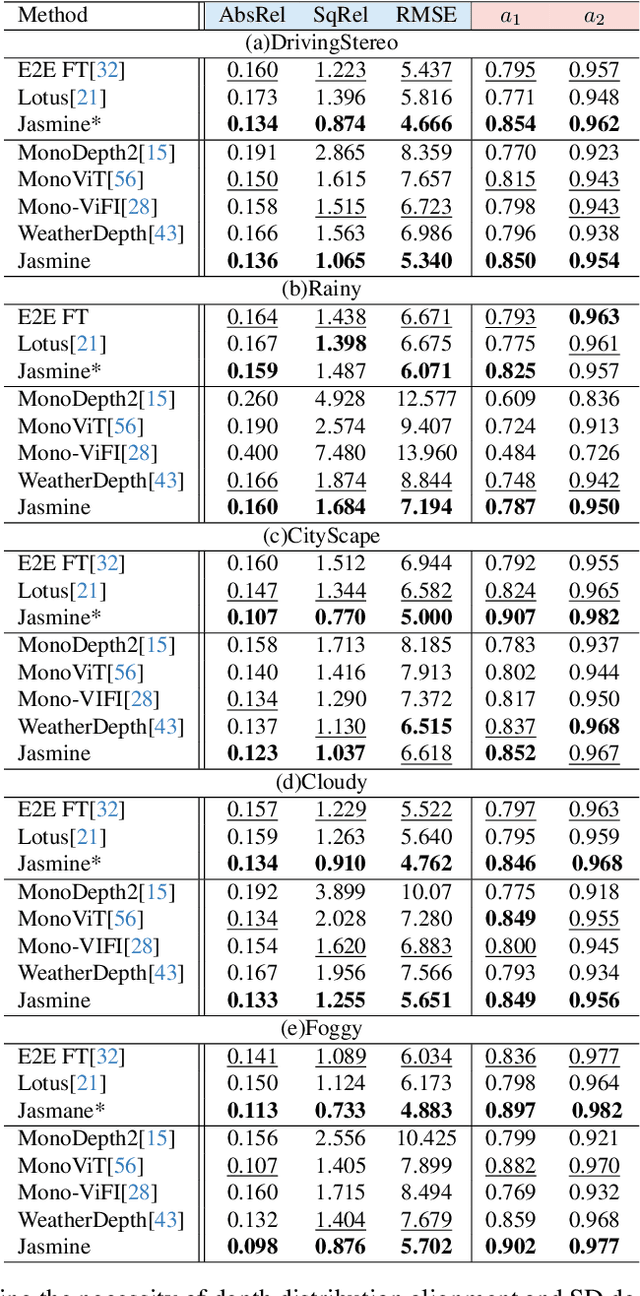
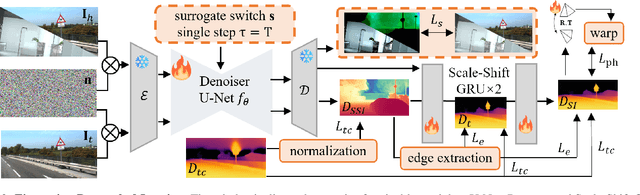
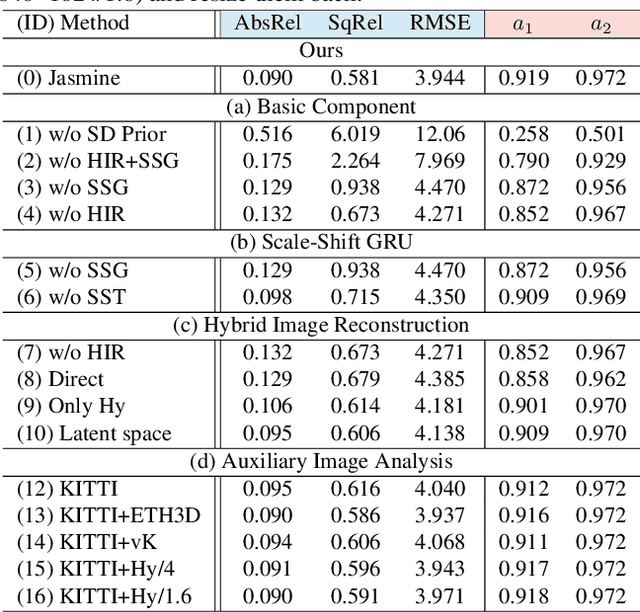
In this paper, we propose Jasmine, the first Stable Diffusion (SD)-based self-supervised framework for monocular depth estimation, which effectively harnesses SD's visual priors to enhance the sharpness and generalization of unsupervised prediction. Previous SD-based methods are all supervised since adapting diffusion models for dense prediction requires high-precision supervision. In contrast, self-supervised reprojection suffers from inherent challenges (e.g., occlusions, texture-less regions, illumination variance), and the predictions exhibit blurs and artifacts that severely compromise SD's latent priors. To resolve this, we construct a novel surrogate task of hybrid image reconstruction. Without any additional supervision, it preserves the detail priors of SD models by reconstructing the images themselves while preventing depth estimation from degradation. Furthermore, to address the inherent misalignment between SD's scale and shift invariant estimation and self-supervised scale-invariant depth estimation, we build the Scale-Shift GRU. It not only bridges this distribution gap but also isolates the fine-grained texture of SD output against the interference of reprojection loss. Extensive experiments demonstrate that Jasmine achieves SoTA performance on the KITTI benchmark and exhibits superior zero-shot generalization across multiple datasets.
Semi-Supervised 360 Layout Estimation with Panoramic Collaborative Perturbations
Mar 03, 2025The performance of existing supervised layout estimation methods heavily relies on the quality of data annotations. However, obtaining large-scale and high-quality datasets remains a laborious and time-consuming challenge. To solve this problem, semi-supervised approaches are introduced to relieve the demand for expensive data annotations by encouraging the consistent results of unlabeled data with different perturbations. However, existing solutions merely employ vanilla perturbations, ignoring the characteristics of panoramic layout estimation. In contrast, we propose a novel semi-supervised method named SemiLayout360, which incorporates the priors of the panoramic layout and distortion through collaborative perturbations. Specifically, we leverage the panoramic layout prior to enhance the model's focus on potential layout boundaries. Meanwhile, we introduce the panoramic distortion prior to strengthen distortion awareness. Furthermore, to prevent intense perturbations from hindering model convergence and ensure the effectiveness of prior-based perturbations, we divide and reorganize them as panoramic collaborative perturbations. Our experimental results on three mainstream benchmarks demonstrate that the proposed method offers significant advantages over existing state-of-the-art (SoTA) solutions.