 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Really Matters for Learning-based LiDAR-Camera Calibration
Paper and Code
Jan 28, 2025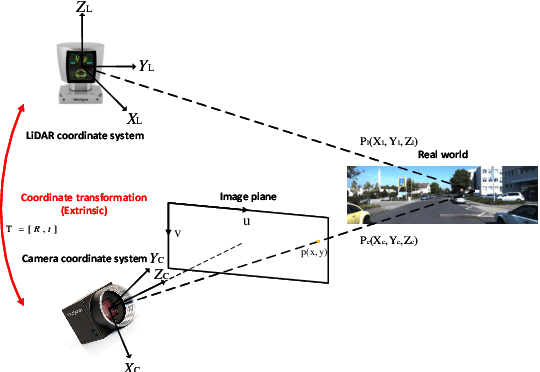
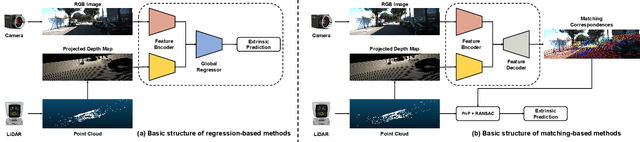
Calibration is an essential prerequisite for the accurate data fusion of LiDAR and camera sensors. Traditional calibration techniques often require specific targets or suitable scenes to obtain reliable 2D-3D correspondences. To tackle the challenge of target-less and online calibration, deep neural networks have been introduced to solve the problem in a data-driven manner. While previous learning-based methods have achieved impressive performance on specific datasets, they still struggle in complex real-world scenarios. Most existing works focus on improving calibration accuracy but overlook the underlying mechanisms. In this paper, we revisit the development of learning-based LiDAR-Camera calibration and encourage the community to pay more attention to the underlying principles to advance practical applications. We systematically analyze the paradigm of mainstream learning-based methods, and identify the critical limitations of regression-based methods with the widely used data generation pipeline. Our findings reveal that most learning-based methods inadvertently operate as retrieval networks, focusing more on single-modality distributions rather than cross-modality correspondences. We also investigate how the input data format and preprocessing operations impact network performance and summarize the regression clues to inform further improvements.