 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStabilizing Rubric Integration Training via Decoupled Advantage Normalization
Mar 27, 2026We propose Process-Aware Policy Optimization (PAPO), a method that integrates process-level evaluation into Group Relative Policy Optimization (GRPO) through decoupled advantage normalization, to address two limitations of existing reward designs. Outcome reward models (ORM) evaluate only final-answer correctness, treating all correct responses identically regardless of reasoning quality, and gradually lose the advantage signal as groups become uniformly correct. Process reward models (PRM) offer richer supervision, but directly using PRM scores causes reward hacking, where models exploit verbosity to inflate scores while accuracy collapses. PAPO resolves both by composing the advantage from an outcome component Aout, derived from ORM and normalized over all responses, and a process component Aproc, derived from a rubric-based PRM and normalized exclusively among correct responses. This decoupled design ensures that Aout anchors training on correctness while Aproc differentiates reasoning quality without distorting the outcome signal. Experiments across multiple model scales and six benchmarks demonstrate that PAPO consistently outperforms ORM, reaching 51.3% vs.\ 46.3% on OlympiadBench while continuing to improve as ORM plateaus and declines.
CriticLean: Critic-Guided Reinforcement Learning for Mathematical Formalization
Jul 08, 2025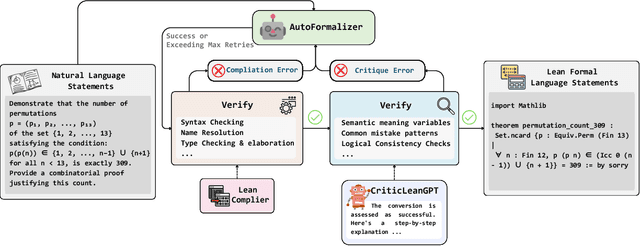
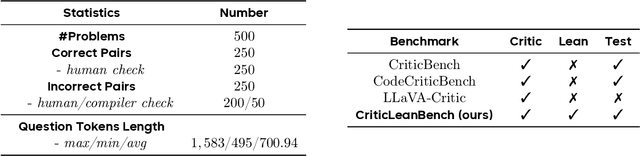
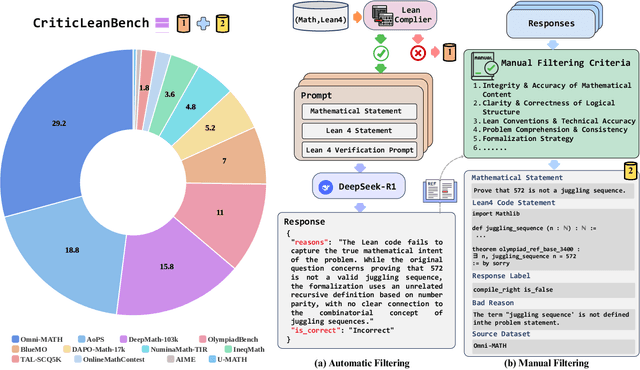
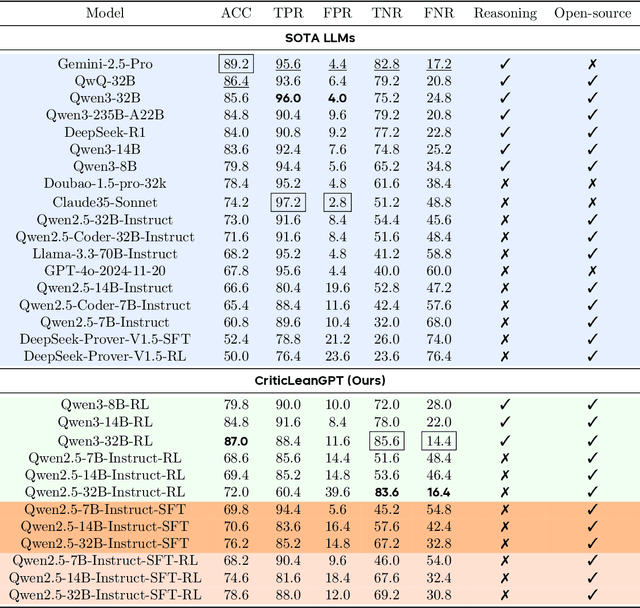
Translating natural language mathematical statements into formal, executable code is a fundamental challenge in automated theorem proving. While prior work has focused on generation and compilation success, little attention has been paid to the critic phase-the evaluation of whether generated formalizations truly capture the semantic intent of the original problem. In this paper, we introduce CriticLean, a novel critic-guided reinforcement learning framework that elevates the role of the critic from a passive validator to an active learning component. Specifically, first, we propose the CriticLeanGPT, trained via supervised fine-tuning and reinforcement learning, to rigorously assess the semantic fidelity of Lean 4 formalizations. Then, we introduce CriticLeanBench, a benchmark designed to measure models' ability to distinguish semantically correct from incorrect formalizations, and demonstrate that our trained CriticLeanGPT models can significantly outperform strong open- and closed-source baselines. Building on the CriticLean framework, we construct FineLeanCorpus, a dataset comprising over 285K problems that exhibits rich domain diversity, broad difficulty coverage, and high correctness based on human evaluation. Overall, our findings highlight that optimizing the critic phase is essential for producing reliable formalizations, and we hope our CriticLean will provide valuable insights for future advances in formal mathematical reasoning.
FormalMATH: Benchmarking Formal Mathematical Reasoning of Large Language Models
May 05, 2025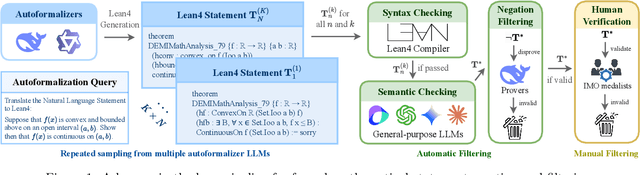
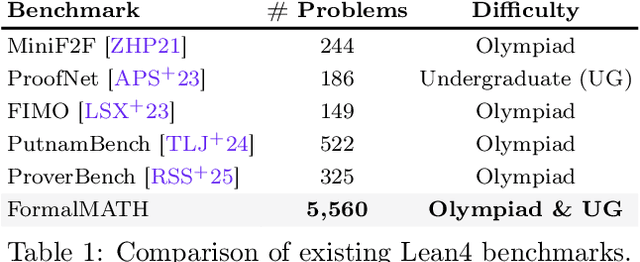
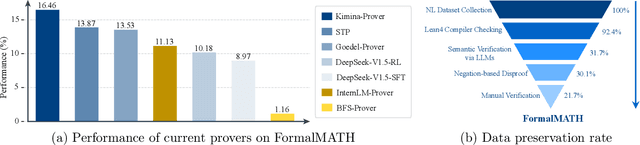
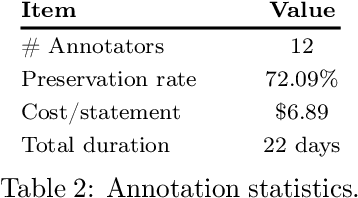
Formal mathematical reasoning remains a critical challenge for artificial intelligence, hindered by limitations of existing benchmarks in scope and scale. To address this, we present FormalMATH, a large-scale Lean4 benchmark comprising 5,560 formally verified problems spanning from high-school Olympiad challenges to undergraduate-level theorems across diverse domains (e.g., algebra, applied mathematics, calculus, number theory, and discrete mathematics). To mitigate the inefficiency of manual formalization, we introduce a novel human-in-the-loop autoformalization pipeline that integrates: (1) specialized large language models (LLMs) for statement autoformalization, (2) multi-LLM semantic verification, and (3) negation-based disproof filtering strategies using off-the-shelf LLM-based provers. This approach reduces expert annotation costs by retaining 72.09% of statements before manual verification while ensuring fidelity to the original natural-language problems. Our evaluation of state-of-the-art LLM-based theorem provers reveals significant limitations: even the strongest models achieve only 16.46% success rate under practical sampling budgets, exhibiting pronounced domain bias (e.g., excelling in algebra but failing in calculus) and over-reliance on simplified automation tactics. Notably, we identify a counterintuitive inverse relationship between natural-language solution guidance and proof success in chain-of-thought reasoning scenarios, suggesting that human-written informal reasoning introduces noise rather than clarity in the formal reasoning settings. We believe that FormalMATH provides a robust benchmark for benchmarking formal mathematical reasoning.
Kimina-Prover Preview: Towards Large Formal Reasoning Models with Reinforcement Learning
Apr 15, 2025We introduce Kimina-Prover Preview, a large language model that pioneers a novel reasoning-driven exploration paradigm for formal theorem proving, as showcased in this preview release. Trained with a large-scale reinforcement learning pipeline from Qwen2.5-72B, Kimina-Prover demonstrates strong performance in Lean 4 proof generation by employing a structured reasoning pattern we term \textit{formal reasoning pattern}. This approach allows the model to emulate human problem-solving strategies in Lean, iteratively generating and refining proof steps. Kimina-Prover sets a new state-of-the-art on the miniF2F benchmark, reaching 80.7% with pass@8192. Beyond improved benchmark performance, our work yields several key insights: (1) Kimina-Prover exhibits high sample efficiency, delivering strong results even with minimal sampling (pass@1) and scaling effectively with computational budget, stemming from its unique reasoning pattern and RL training; (2) we demonstrate clear performance scaling with model size, a trend previously unobserved for neural theorem provers in formal mathematics; (3) the learned reasoning style, distinct from traditional search algorithms, shows potential to bridge the gap between formal verification and informal mathematical intuition. We open source distilled versions with 1.5B and 7B parameters of Kimina-Prover
COIG-P: A High-Quality and Large-Scale Chinese Preference Dataset for Alignment with Human Values
Apr 07, 2025Aligning large language models (LLMs) with human preferences has achieved remarkable success. However, existing Chinese preference datasets are limited by small scale, narrow domain coverage, and lack of rigorous data validation. Additionally, the reliance on human annotators for instruction and response labeling significantly constrains the scalability of human preference datasets. To address these challenges, we design an LLM-based Chinese preference dataset annotation pipeline with no human intervention. Specifically, we crawled and carefully filtered 92k high-quality Chinese queries and employed 15 mainstream LLMs to generate and score chosen-rejected response pairs. Based on it, we introduce COIG-P (Chinese Open Instruction Generalist - Preference), a high-quality, large-scale Chinese preference dataset, comprises 1,009k Chinese preference pairs spanning 6 diverse domains: Chat, Code, Math, Logic, Novel, and Role. Building upon COIG-P, to reduce the overhead of using LLMs for scoring, we trained a 8B-sized Chinese Reward Model (CRM) and meticulously constructed a Chinese Reward Benchmark (CRBench). Evaluation results based on AlignBench \citep{liu2024alignbenchbenchmarkingchinesealignment} show that that COIG-P significantly outperforms other Chinese preference datasets, and it brings significant performance improvements ranging from 2% to 12% for the Qwen2/2.5 and Infinity-Instruct-3M-0625 model series, respectively. The results on CRBench demonstrate that our CRM has a strong and robust scoring ability. We apply it to filter chosen-rejected response pairs in a test split of COIG-P, and our experiments show that it is comparable to GPT-4o in identifying low-quality samples while maintaining efficiency and cost-effectiveness. Our codes and data are released in https://github.com/multimodal-art-projection/COIG-P.
Generating Symbolic World Models via Test-time Scaling of Large Language Models
Feb 07, 2025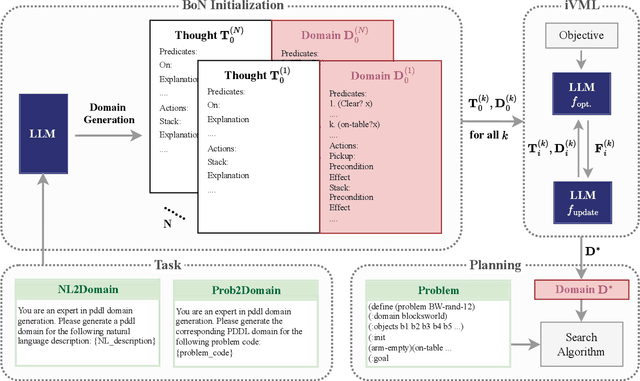
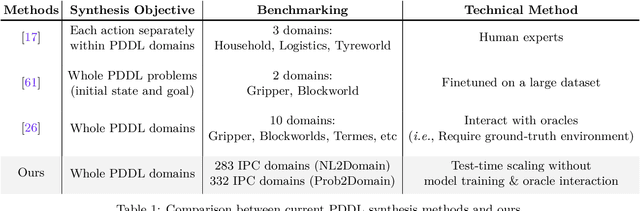
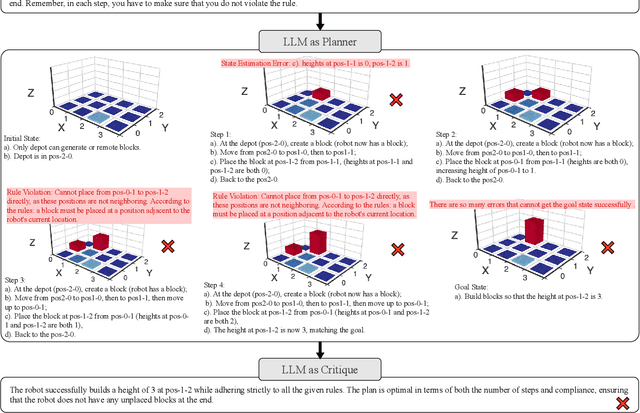
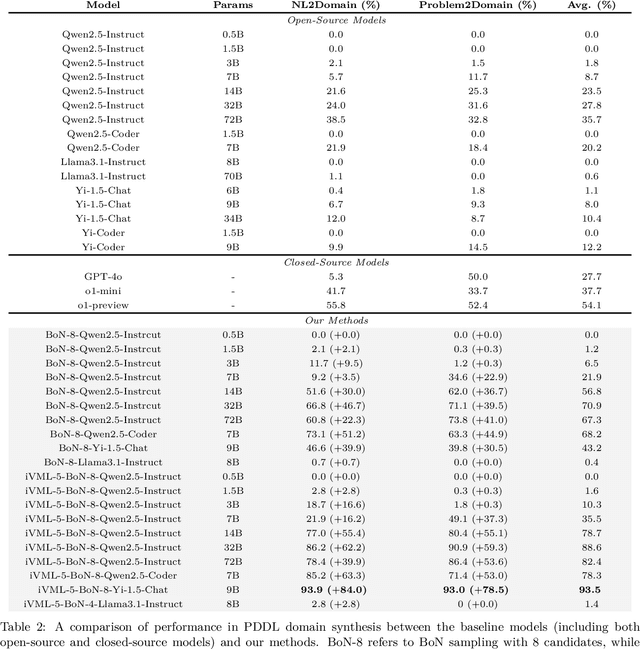
Solving complex planning problems requires Large Language Models (LLMs) to explicitly model the state transition to avoid rule violations, comply with constraints, and ensure optimality-a task hindered by the inherent ambiguity of natural language. To overcome such ambiguity, Planning Domain Definition Language (PDDL) is leveraged as a planning abstraction that enables precise and formal state descriptions. With PDDL, we can generate a symbolic world model where classic searching algorithms, such as A*, can be seamlessly applied to find optimal plans. However, directly generating PDDL domains with current LLMs remains an open challenge due to the lack of PDDL training data. To address this challenge, we propose to scale up the test-time computation of LLMs to enhance their PDDL reasoning capabilities, thereby enabling the generation of high-quality PDDL domains. Specifically, we introduce a simple yet effective algorithm, which first employs a Best-of-N sampling approach to improve the quality of the initial solution and then refines the solution in a fine-grained manner with verbalized machine learning. Our method outperforms o1-mini by a considerable margin in the generation of PDDL domain, achieving over 50% success rate on two tasks (i.e., generating PDDL domains from natural language description or PDDL problems). This is done without requiring additional training. By taking advantage of PDDL as state abstraction, our method is able to outperform current state-of-the-art methods on almost all competition-level planning tasks.
ManiFoundation Model for General-Purpose Robotic Manipulation of Contact Synthesis with Arbitrary Objects and Robots
May 11, 2024
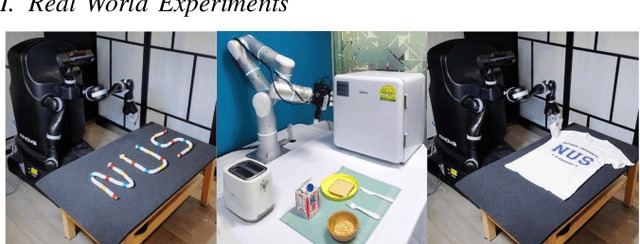
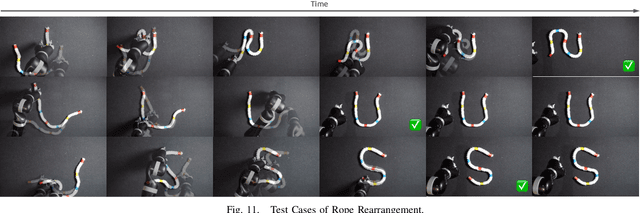
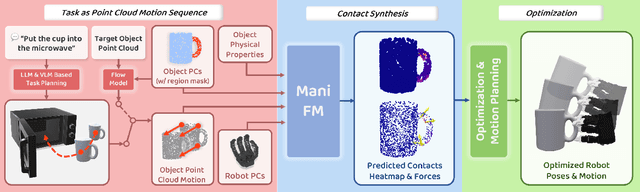
To substantially enhance robot intelligence, there is a pressing need to develop a large model that enables general-purpose robots to proficiently undertake a broad spectrum of manipulation tasks, akin to the versatile task-planning ability exhibited by LLMs. The vast diversity in objects, robots, and manipulation tasks presents huge challenges. Our work introduces a comprehensive framework to develop a foundation model for general robotic manipulation that formalizes a manipulation task as contact synthesis. Specifically, our model takes as input object and robot manipulator point clouds, object physical attributes, target motions, and manipulation region masks. It outputs contact points on the object and associated contact forces or post-contact motions for robots to achieve the desired manipulation task. We perform extensive experiments both in the simulation and real-world settings, manipulating articulated rigid objects, rigid objects, and deformable objects that vary in dimensionality, ranging from one-dimensional objects like ropes to two-dimensional objects like cloth and extending to three-dimensional objects such as plasticine. Our model achieves average success rates of around 90\%. Supplementary materials and videos are available on our project website at https://manifoundationmodel.github.io/.
Chinese Tiny LLM: Pretraining a Chinese-Centric Large Language Model
Apr 09, 2024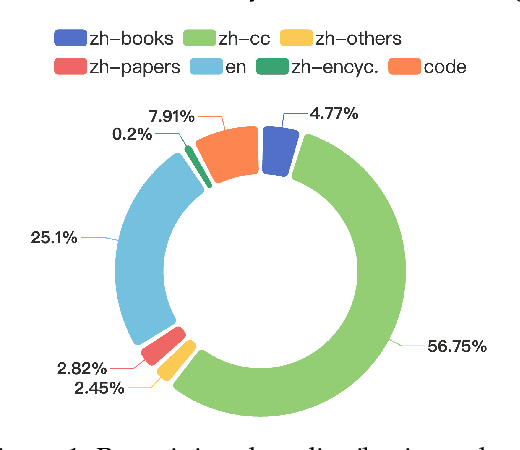

In this study, we introduce CT-LLM, a 2B large language model (LLM) that illustrates a pivotal shift towards prioritizing the Chinese language in developing LLMs. Uniquely initiated from scratch, CT-LLM diverges from the conventional methodology by primarily incorporating Chinese textual data, utilizing an extensive corpus of 1,200 billion tokens, including 800 billion Chinese tokens, 300 billion English tokens, and 100 billion code tokens. This strategic composition facilitates the model's exceptional proficiency in understanding and processing Chinese, a capability further enhanced through alignment techniques. Demonstrating remarkable performance on the CHC-Bench, CT-LLM excels in Chinese language tasks, and showcases its adeptness in English through SFT. This research challenges the prevailing paradigm of training LLMs predominantly on English corpora and then adapting them to other languages, broadening the horizons for LLM training methodologies. By open-sourcing the full process of training a Chinese LLM, including a detailed data processing procedure with the obtained Massive Appropriate Pretraining Chinese Corpus (MAP-CC), a well-chosen multidisciplinary Chinese Hard Case Benchmark (CHC-Bench), and the 2B-size Chinese Tiny LLM (CT-LLM), we aim to foster further exploration and innovation in both academia and industry, paving the way for more inclusive and versatile language models.
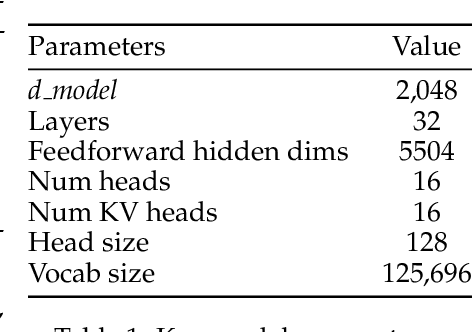
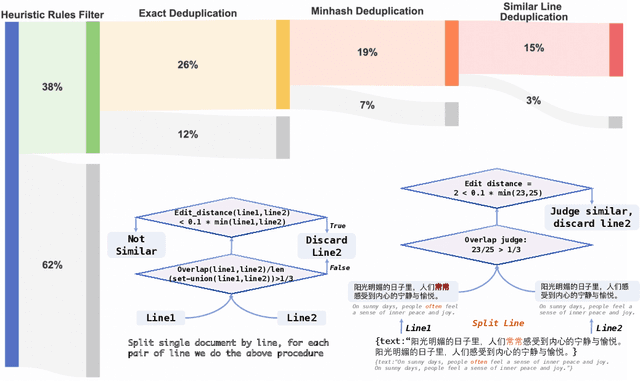
CodeEditorBench: Evaluating Code Editing Capability of Large Language Models
Apr 06, 2024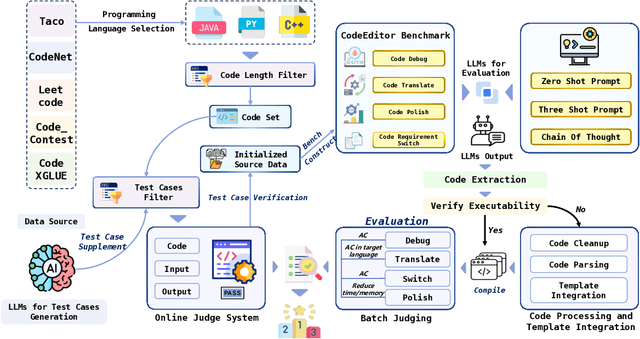
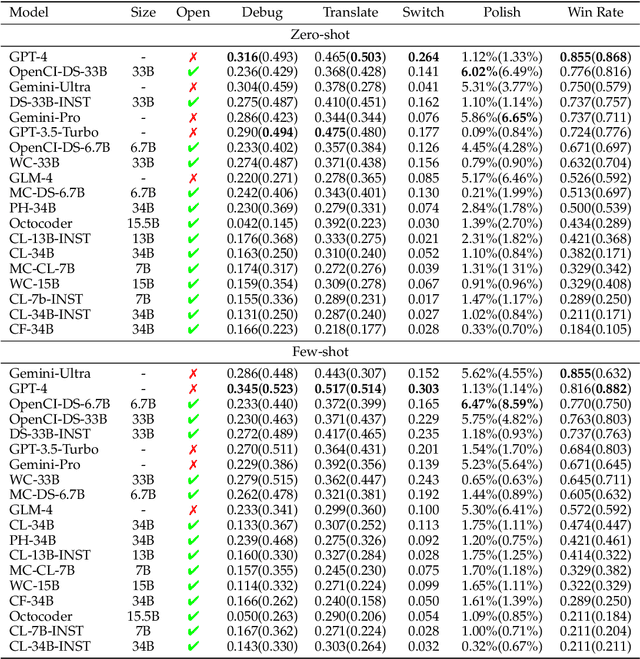
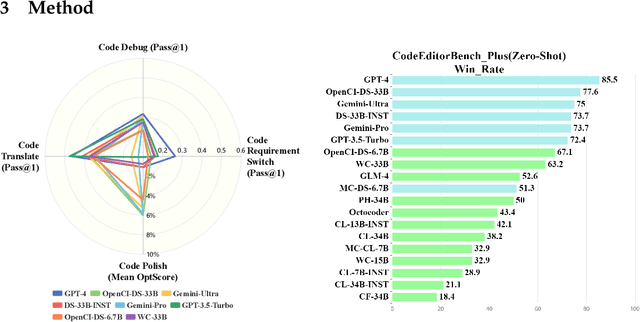
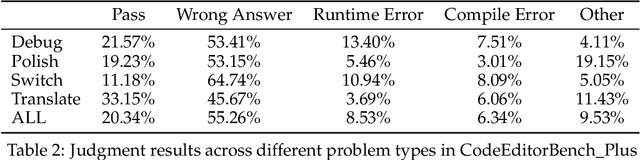
Large Language Models (LLMs) for code are rapidly evolving, with code editing emerging as a critical capability. We introduce CodeEditorBench, an evaluation framework designed to rigorously assess the performance of LLMs in code editing tasks, including debugging, translating, polishing, and requirement switching. Unlike existing benchmarks focusing solely on code generation, CodeEditorBench emphasizes real-world scenarios and practical aspects of software development. We curate diverse coding challenges and scenarios from five sources, covering various programming languages, complexity levels, and editing tasks. Evaluation of 19 LLMs reveals that closed-source models (particularly Gemini-Ultra and GPT-4), outperform open-source models in CodeEditorBench, highlighting differences in model performance based on problem types and prompt sensitivities. CodeEditorBench aims to catalyze advancements in LLMs by providing a robust platform for assessing code editing capabilities. We will release all prompts and datasets to enable the community to expand the dataset and benchmark emerging LLMs. By introducing CodeEditorBench, we contribute to the advancement of LLMs in code editing and provide a valuable resource for researchers and practitioners.
ASP: Learn a Universal Neural Solver!
Mar 01, 2023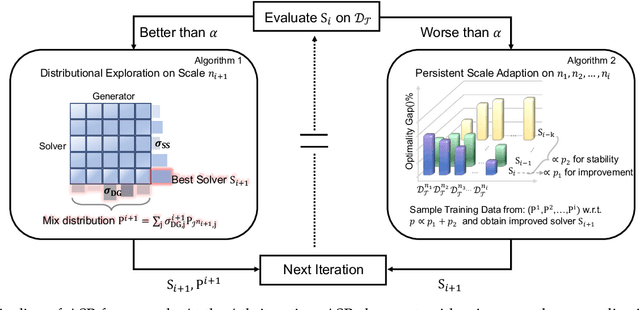

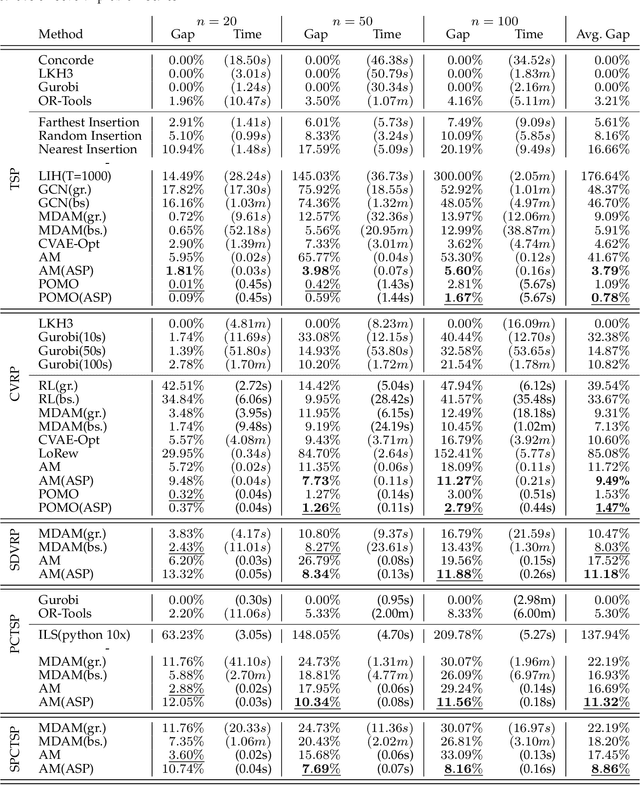

Applying machine learning to combinatorial optimization problems has the potential to improve both efficiency and accuracy. However, existing learning-based solvers often struggle with generalization when faced with changes in problem distributions and scales. In this paper, we propose a new approach called ASP: Adaptive Staircase Policy Space Response Oracle to address these generalization issues and learn a universal neural solver. ASP consists of two components: Distributional Exploration, which enhances the solver's ability to handle unknown distributions using Policy Space Response Oracles, and Persistent Scale Adaption, which improves scalability through curriculum learning. We have tested ASP on several challenging COPs, including the traveling salesman problem, the vehicle routing problem, and the prize collecting TSP, as well as the real-world instances from TSPLib and CVRPLib. Our results show that even with the same model size and weak training signal, ASP can help neural solvers explore and adapt to unseen distributions and varying scales, achieving superior performance. In particular, compared with the same neural solvers under a standard training pipeline, ASP produces a remarkable decrease in terms of the optimality gap with 90.9% and 47.43% on generated instances and real-world instances for TSP, and a decrease of 19% and 45.57% for CVRP.