 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFLASH: Fast Learning via GPU-Accelerated Simulation for High-Fidelity Deformable Manipulation in Minutes
Apr 19, 2026Simulation frameworks such as Isaac Sim have enabled scalable robot learning for locomotion and rigid-body manipulation; however, contact-rich simulation remains a major bottleneck for deformable object manipulation. The continuously changing geometry of soft materials, together with large numbers of vertices and contact constraints, makes it difficult to achieve high accuracy, speed, and stability required for large-scale interactive learning. We present FLASH, a GPU-native simulation framework for contact-rich deformable manipulation, built on an accurate NCP-based solver that enforces strict contact and deformation constraints while being explicitly designed for fine-grained GPU parallelism. Rather than porting conventional single-instruction-multiple-data (SIMD) solvers to GPUs, FLASH redesigns the physics engine from the ground up to leverage modern GPU architectures, including optimized collision handling and memory layouts. As a result, FLASH scales to over 3 million degrees of freedom at 30 FPS on a single RTX 5090, while accurately simulating physical interactions. Policies trained solely on FLASH-generated synthetic data in minutes achieve robust zero-shot sim-to-real transfer, which we validate on physical robots performing challenging deformable manipulation tasks such as towel folding and garment folding, without any real-world demonstration, providing a practical alternative to labor-intensive real-world data collection.
Less Approximates More: Harmonizing Performance and Confidence Faithfulness via Hybrid Post-Training for High-Stakes Tasks
Apr 09, 2026Large language models are increasingly deployed in high-stakes tasks, where confident yet incorrect inferences may cause severe real-world harm, bringing the previously overlooked issue of confidence faithfulness back to the forefront. A promising solution is to jointly optimize unsupervised Reinforcement Learning from Internal Feedback (RLIF) with reasoning-trace-guided Reasoning Distillation (RD), which may face three persistent challenges: scarcity of high-quality training corpora, factually unwarranted overconfidence and indiscriminate fusion that amplifies erroneous updates. Inspired by the human confidence accumulation from uncertainty to certainty, we propose Progressive Reasoning Gain (PRG) to measure whether reasoning steps progressively strengthen support for the final answer. Furthermore, we introduce HyTuning, a hybrid post-training framework that adaptively reweights RD and RLIF via a PRG-style metric, using scarce supervised reasoning traces as a stable anchor while exploiting abundant unlabeled queries for scalability. Experiments on several domain-specific and general benchmarks demonstrate that HyTuning improves accuracy while achieving confidence faithfulness under limited supervision, supporting a practical "Less Approximates More" effect.
Continuous Telemonitoring of Heart Failure using Personalised Speech Dynamics
Feb 25, 2026Remote monitoring of heart failure (HF) via speech signals provides a non-invasive and cost-effective solution for long-term patient management. However, substantial inter-individual heterogeneity in vocal characteristics often limits the accuracy of traditional cross-sectional classification models. To address this, we propose a Longitudinal Intra-Patient Tracking (LIPT) scheme designed to capture the trajectory of relative symptomatic changes within individuals. Central to this framework is a Personalised Sequential Encoder (PSE), which transforms longitudinal speech recordings into context-aware latent representations. By incorporating historical data at each timestamp, the PSE facilitates a holistic assessment of the clinical trajectory rather than modelling discrete visits independently. Experimental results from a cohort of 225 patients demonstrate that the LIPT paradigm significantly outperforms the classic cross-sectional approaches, achieving a recognition accuracy of 99.7% for clinical status transitions. The model's high sensitivity was further corroborated by additional follow-up data, confirming its efficacy in predicting HF deterioration and its potential to secure patient safety in remote, home-based settings. Furthermore, this work addresses the gap in existing literature by providing a comprehensive analysis of different speech task designs and acoustic features. Taken together, the superior performance of the LIPT framework and PSE architecture validates their readiness for integration into long-term telemonitoring systems, offering a scalable solution for remote heart failure management.
Compose Yourself: Average-Velocity Flow Matching for One-Step Speech Enhancement
Sep 19, 2025Diffusion and flow matching (FM) models have achieved remarkable progress in speech enhancement (SE), yet their dependence on multi-step generation is computationally expensive and vulnerable to discretization errors. Recent advances in one-step generative modeling, particularly MeanFlow, provide a promising alternative by reformulating dynamics through average velocity fields. In this work, we present COSE, a one-step FM framework tailored for SE. To address the high training overhead of Jacobian-vector product (JVP) computations in MeanFlow, we introduce a velocity composition identity to compute average velocity efficiently, eliminating expensive computation while preserving theoretical consistency and achieving competitive enhancement quality. Extensive experiments on standard benchmarks show that COSE delivers up to 5x faster sampling and reduces training cost by 40%, all without compromising speech quality. Code is available at https://github.com/ICDM-UESTC/COSE.
Hybrid-Tower: Fine-grained Pseudo-query Interaction and Generation for Text-to-Video Retrieval
Sep 05, 2025The Text-to-Video Retrieval (T2VR) task aims to retrieve unlabeled videos by textual queries with the same semantic meanings. Recent CLIP-based approaches have explored two frameworks: Two-Tower versus Single-Tower framework, yet the former suffers from low effectiveness, while the latter suffers from low efficiency. In this study, we explore a new Hybrid-Tower framework that can hybridize the advantages of the Two-Tower and Single-Tower framework, achieving high effectiveness and efficiency simultaneously. We propose a novel hybrid method, Fine-grained Pseudo-query Interaction and Generation for T2VR, ie, PIG, which includes a new pseudo-query generator designed to generate a pseudo-query for each video. This enables the video feature and the textual features of pseudo-query to interact in a fine-grained manner, similar to the Single-Tower approaches to hold high effectiveness, even before the real textual query is received. Simultaneously, our method introduces no additional storage or computational overhead compared to the Two-Tower framework during the inference stage, thus maintaining high efficiency. Extensive experiments on five commonly used text-video retrieval benchmarks demonstrate that our method achieves a significant improvement over the baseline, with an increase of $1.6\% \sim 3.9\%$ in R@1. Furthermore, our method matches the efficiency of Two-Tower models while achieving near state-of-the-art performance, highlighting the advantages of the Hybrid-Tower framework.
YUNet: Improved YOLOv11 Network for Skyline Detection
Feb 18, 2025Skyline detection plays an important role in geolocalizaion, flight control, visual navigation, port security, etc. The appearance of the sky and non-sky areas are variable, because of different weather or illumination environment, which brings challenges to skyline detection. In this research, we proposed the YUNet algorithm, which improved the YOLOv11 architecture to segment the sky region and extract the skyline in complicated and variable circumstances. To improve the ability of multi-scale and large range contextual feature fusion, the YOLOv11 architecture is extended as an UNet-like architecture, consisting of an encoder, neck and decoder submodule. The encoder extracts the multi-scale features from the given images. The neck makes fusion of these multi-scale features. The decoder applies the fused features to complete the prediction rebuilding. To validate the proposed approach, the YUNet was tested on Skyfinder and CH1 datasets for segmentation and skyline detection respectively. Our test shows that the IoU of YUnet segmentation can reach 0.9858, and the average error of YUnet skyline detection is just 1.36 pixels. The implementation is published at https://github.com/kuazhangxiaoai/SkylineDet-YOLOv11Seg.git.
Advancing Single- and Multi-task Text Classification through Large Language Model Fine-tuning
Dec 11, 2024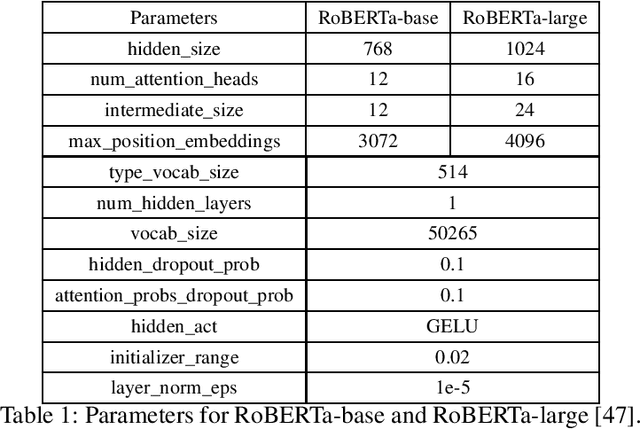
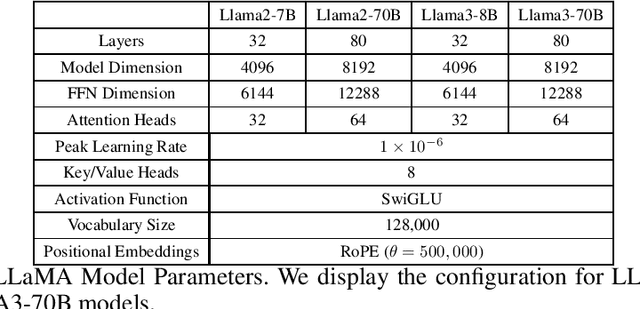
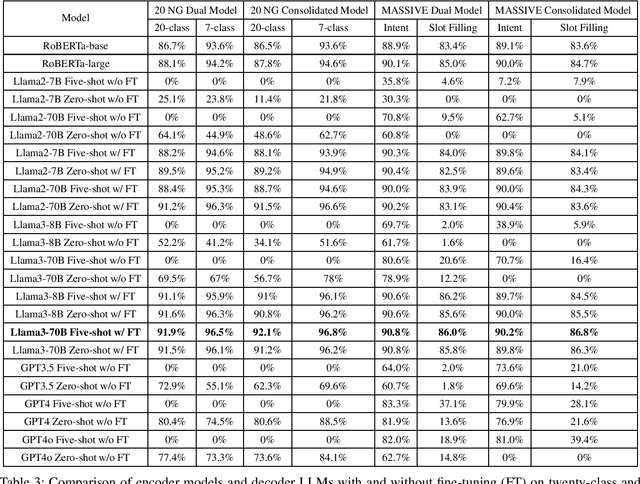
Both encoder-only models (e.g., BERT, RoBERTa) and large language models (LLMs, e.g., Llama3) have been widely used for text classification tasks. However, there is a lack of systematic studies comparing the performance of encoder-based models and LLMs in text classification, particularly when fine-tuning is involved. This study employed a diverse range of models and methods, varying in size and architecture, and including both fine-tuned and pre-trained approaches. We first assessed the performances of these LLMs on the 20 Newsgroups (20NG) and MASSIVE datasets, comparing them to encoder-only RoBERTa models. Additionally, we explored the multi-task capabilities of both model types by combining multiple classification tasks, including intent detection and slot-filling, into a single model using data from both datasets. Our results indicate that fully fine-tuned Llama3-70B models outperform RoBERTa-large and other decoder LLMs across various classification tasks and datasets. Moreover, the consolidated multi-task fine-tuned LLMs matched the performance of dual-model setups in both tasks across both datasets. Overall, our study provides a comprehensive benchmark of encoder-only and LLM models on text classification tasks and demonstrates a method to combine two or more fully fine-tuned decoder LLMs for reduced latency and equivalent performance.
Stable Object Placement Under Geometric Uncertainty via Differentiable Contact Dynamics
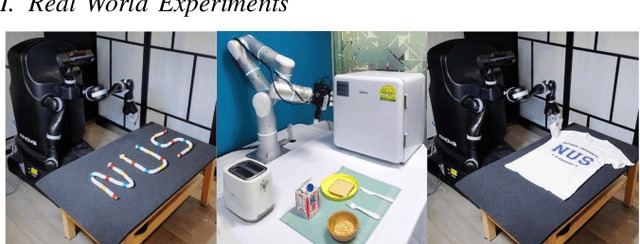
Sep 26, 2024From serving a cup of coffee to carefully rearranging delicate items, stable object placement is a crucial skill for future robots. This skill is challenging due to the required accuracy, which is difficult to achieve under geometric uncertainty. We leverage differentiable contact dynamics to develop a principled method for stable object placement under geometric uncertainty. We estimate the geometric uncertainty by minimizing the discrepancy between the force-torque sensor readings and the model predictions through gradient descent. We further keep track of a belief over multiple possible geometric parameters to mitigate the gradient-based method's sensitivity to the initialization. We verify our approach in the real world on various geometric uncertainties, including the in-hand pose uncertainty of the grasped object, the object's shape uncertainty, and the environment's shape uncertainty.
Low-Complexity Joint Azimuth-Range-Velocity Estimation for Integrated Sensing and Communication with OFDM Waveform
May 15, 2024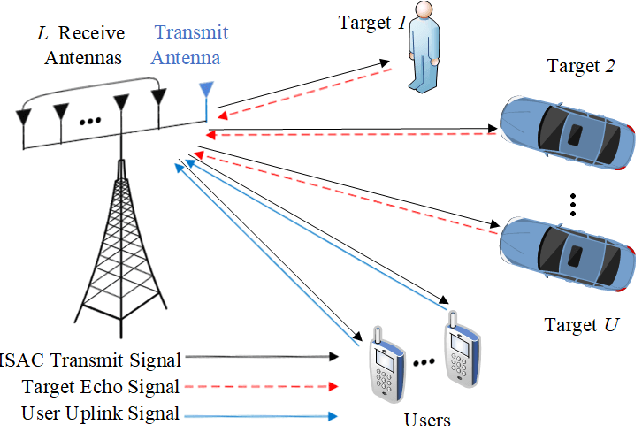
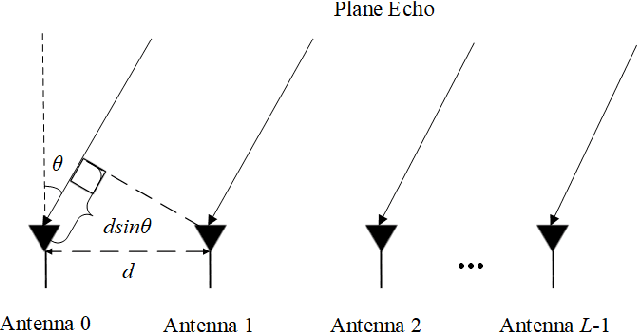
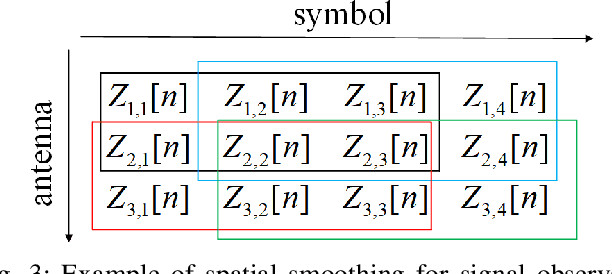
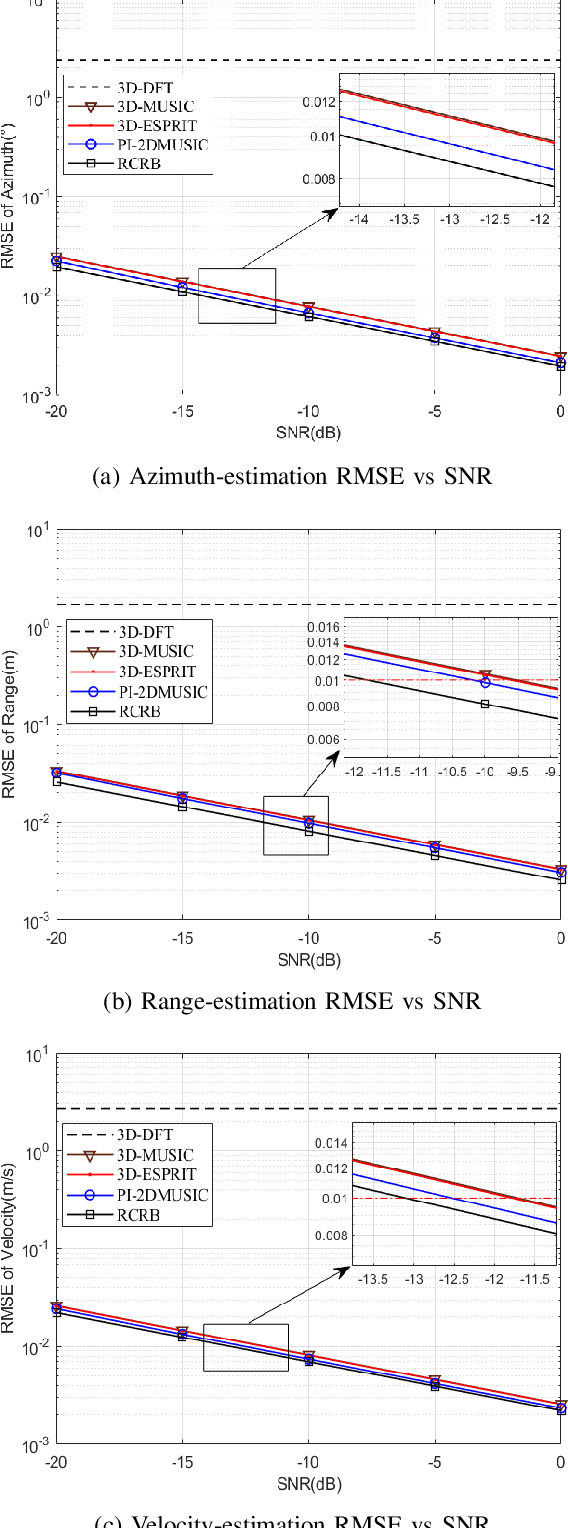
Integrated sensing and communication (ISAC) is a main application scenario of the sixth-generation mobile communication systems. Due to the fast-growing number of antennas and subcarriers in cellular systems, the computational complexity of joint azimuth-range-velocity estimation (JARVE) in ISAC systems is extremely high. This paper studies the JARVE problem for a monostatic ISAC system with orthogonal frequency division multiplexing (OFDM) waveform, in which a base station receives the echos of its transmitted cellular OFDM signals to sense multiple targets. The Cramer-Rao bounds are first derived for JARVE. A low-complexity algorithm is further designed for super-resolution JARVE, which utilizes the proposed iterative subspace update scheme and Levenberg-Marquardt optimization method to replace the exhaustive search of spatial spectrum in multiple-signal-classification (MUSIC) algorithm. Finally, with the practical parameters of 5G New Radio, simulation results verify that the proposed algorithm can reduce the computational complexity by three orders of magnitude and two orders of magnitude compared to the existing three-dimensional MUSIC algorithm and estimation-of-signal-parameters-using-rotational-invariance-techniques (ESPRIT) algorithm, respectively, and also improve the estimation performance.
ManiFoundation Model for General-Purpose Robotic Manipulation of Contact Synthesis with Arbitrary Objects and Robots
May 11, 2024
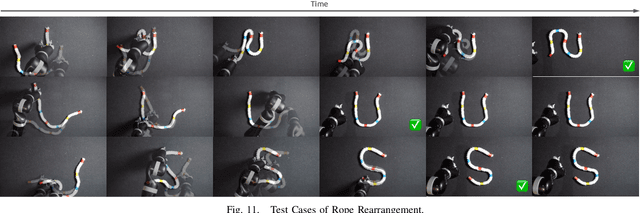
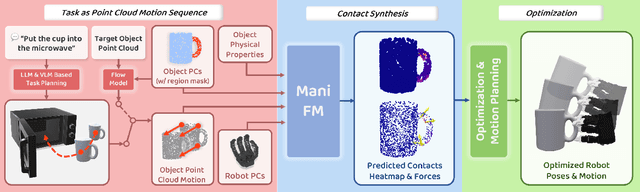
To substantially enhance robot intelligence, there is a pressing need to develop a large model that enables general-purpose robots to proficiently undertake a broad spectrum of manipulation tasks, akin to the versatile task-planning ability exhibited by LLMs. The vast diversity in objects, robots, and manipulation tasks presents huge challenges. Our work introduces a comprehensive framework to develop a foundation model for general robotic manipulation that formalizes a manipulation task as contact synthesis. Specifically, our model takes as input object and robot manipulator point clouds, object physical attributes, target motions, and manipulation region masks. It outputs contact points on the object and associated contact forces or post-contact motions for robots to achieve the desired manipulation task. We perform extensive experiments both in the simulation and real-world settings, manipulating articulated rigid objects, rigid objects, and deformable objects that vary in dimensionality, ranging from one-dimensional objects like ropes to two-dimensional objects like cloth and extending to three-dimensional objects such as plasticine. Our model achieves average success rates of around 90\%. Supplementary materials and videos are available on our project website at https://manifoundationmodel.github.io/.