 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFLASH: Fast Learning via GPU-Accelerated Simulation for High-Fidelity Deformable Manipulation in Minutes
Apr 19, 2026Simulation frameworks such as Isaac Sim have enabled scalable robot learning for locomotion and rigid-body manipulation; however, contact-rich simulation remains a major bottleneck for deformable object manipulation. The continuously changing geometry of soft materials, together with large numbers of vertices and contact constraints, makes it difficult to achieve high accuracy, speed, and stability required for large-scale interactive learning. We present FLASH, a GPU-native simulation framework for contact-rich deformable manipulation, built on an accurate NCP-based solver that enforces strict contact and deformation constraints while being explicitly designed for fine-grained GPU parallelism. Rather than porting conventional single-instruction-multiple-data (SIMD) solvers to GPUs, FLASH redesigns the physics engine from the ground up to leverage modern GPU architectures, including optimized collision handling and memory layouts. As a result, FLASH scales to over 3 million degrees of freedom at 30 FPS on a single RTX 5090, while accurately simulating physical interactions. Policies trained solely on FLASH-generated synthetic data in minutes achieve robust zero-shot sim-to-real transfer, which we validate on physical robots performing challenging deformable manipulation tasks such as towel folding and garment folding, without any real-world demonstration, providing a practical alternative to labor-intensive real-world data collection.
Soft Responsive Materials Enhance Humanoid Safety
Jan 06, 2026Humanoid robots are envisioned as general-purpose platforms in human-centered environments, yet their deployment is limited by vulnerability to falls and the risks posed by rigid metal-plastic structures to people and surroundings. We introduce a soft-rigid co-design framework that leverages non-Newtonian fluid-based soft responsive materials to enhance humanoid safety. The material remains compliant during normal interaction but rapidly stiffens under impact, absorbing and dissipating fall-induced forces. Physics-based simulations guide protector placement and thickness and enable learning of active fall policies. Applied to a 42 kg life-size humanoid, the protector markedly reduces peak impact and allows repeated falls without hardware damage, including drops from 3 m and tumbles down long staircases. Across diverse scenarios, the approach improves robot robustness and environmental safety. By uniting responsive materials, structural co-design, and learning-based control, this work advances interact-safe, industry-ready humanoid robots.
Language-Guided Manipulation with Diffusion Policies and Constrained Inpainting
Jun 14, 2024



Diffusion policies have demonstrated robust performance in generative modeling, prompting their application in robotic manipulation controlled via language descriptions. In this paper, we introduce a zero-shot, open-vocabulary diffusion policy method for robot manipulation. Using Vision-Language Models (VLMs), our method transforms linguistic task descriptions into actionable keyframes in 3D space. These keyframes serve to guide the diffusion process via inpainting. However, naively enforcing the diffusion process to adhere to the generated keyframes is problematic: the keyframes from the VLMs may be incorrect and lead to out-of-distribution (OOD) action sequences where the diffusion model performs poorly. To address these challenges, we develop an inpainting optimization strategy that balances adherence to the keyframes v.s. the training data distribution. Experimental evaluations demonstrate that our approach surpasses the performance of traditional fine-tuned language-conditioned methods in both simulated and real-world settings.
SoftMAC: Differentiable Soft Body Simulation with Forecast-based Contact Model and Two-way Coupling with Articulated Rigid Bodies and Clothes
Dec 06, 2023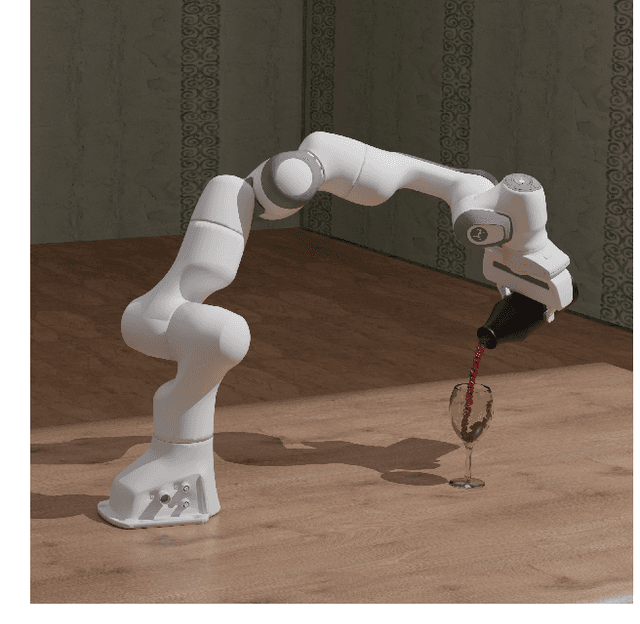
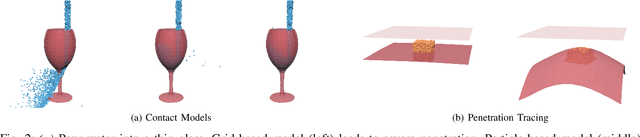
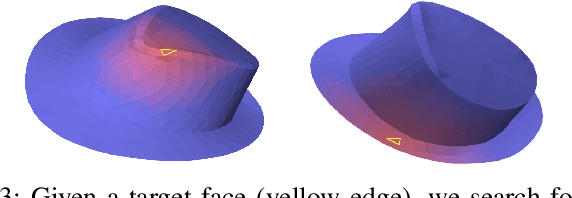
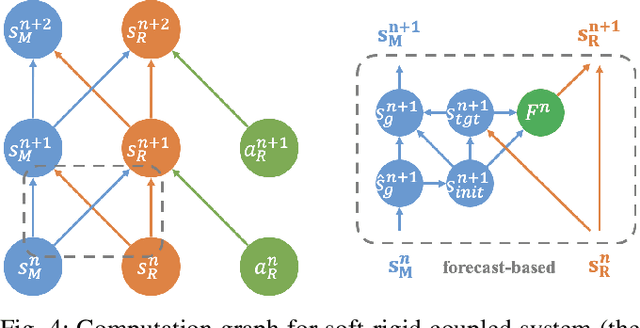
Differentiable physics simulation provides an avenue for tackling previously intractable challenges through gradient-based optimization, thereby greatly improving the efficiency of solving robotics-related problems. To apply differentiable simulation in diverse robotic manipulation scenarios, a key challenge is to integrate various materials in a unified framework. We present SoftMAC, a differentiable simulation framework coupling soft bodies with articulated rigid bodies and clothes. SoftMAC simulates soft bodies with the continuum-mechanics-based Material Point Method (MPM). We provide a forecast-based contact model for MPM, which greatly reduces artifacts like penetration and unnatural rebound. To couple MPM particles with deformable and non-volumetric clothes meshes, we also propose a penetration tracing algorithm that reconstructs the signed distance field in local area. Based on simulators for each modality and the contact model, we develop a differentiable coupling mechanism to simulate the interactions between soft bodies and the other two types of materials. Comprehensive experiments are conducted to validate the effectiveness and accuracy of the proposed differentiable pipeline in downstream robotic manipulation applications. Supplementary materials and videos are available on our project website at https://sites.google.com/view/softmac.
Jade: A Differentiable Physics Engine for Articulated Rigid Bodies with Intersection-Free Frictional Contact
Sep 09, 2023
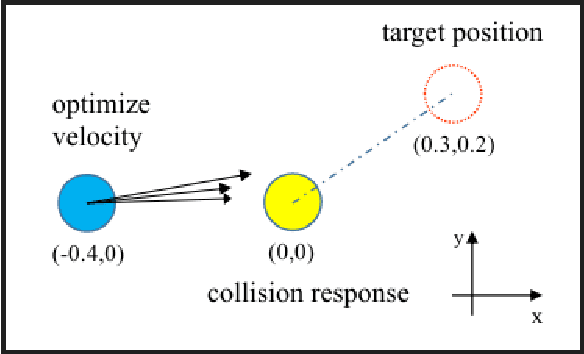
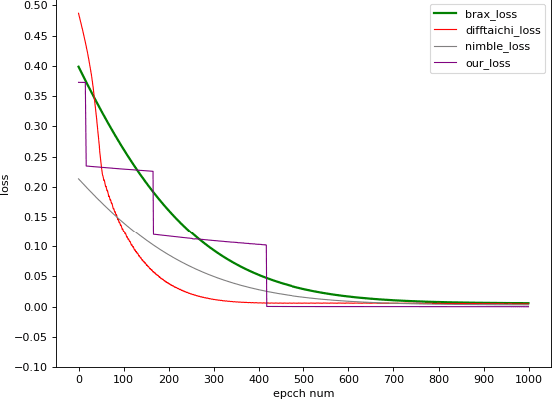
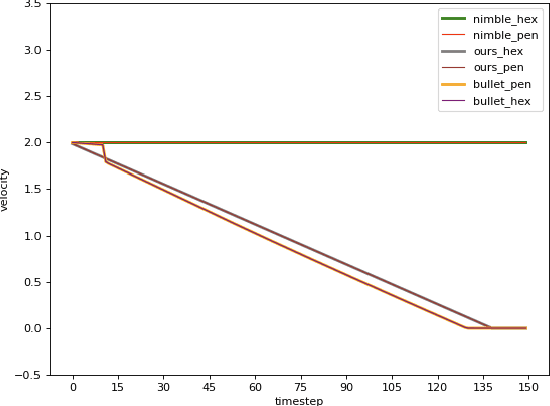
We present Jade, a differentiable physics engine for articulated rigid bodies. Jade models contacts as the Linear Complementarity Problem (LCP). Compared to existing differentiable simulations, Jade offers features including intersection-free collision simulation and stable LCP solutions for multiple frictional contacts. We use continuous collision detection to detect the time of impact and adopt the backtracking strategy to prevent intersection between bodies with complex geometry shapes. We derive the gradient calculation to ensure the whole simulation process is differentiable under the backtracking mechanism. We modify the popular Dantzig algorithm to get valid solutions under multiple frictional contacts. We conduct extensive experiments to demonstrate the effectiveness of our differentiable physics simulation over a variety of contact-rich tasks.
ClothesNet: An Information-Rich 3D Garment Model Repository with Simulated Clothes Environment
Aug 19, 2023
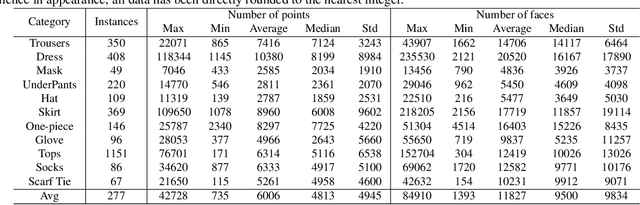

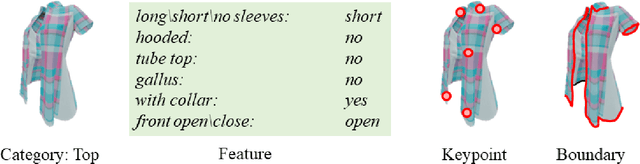
We present ClothesNet: a large-scale dataset of 3D clothes objects with information-rich annotations. Our dataset consists of around 4400 models covering 11 categories annotated with clothes features, boundary lines, and keypoints. ClothesNet can be used to facilitate a variety of computer vision and robot interaction tasks. Using our dataset, we establish benchmark tasks for clothes perception, including classification, boundary line segmentation, and keypoint detection, and develop simulated clothes environments for robotic interaction tasks, including rearranging, folding, hanging, and dressing. We also demonstrate the efficacy of our ClothesNet in real-world experiments. Supplemental materials and dataset are available on our project webpage.