 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniDex: A Robot Foundation Suite for Universal Dexterous Hand Control from Egocentric Human Videos
Mar 23, 2026Dexterous manipulation remains challenging due to the cost of collecting real-robot teleoperation data, the heterogeneity of hand embodiments, and the high dimensionality of control. We present UniDex, a robot foundation suite that couples a large-scale robot-centric dataset with a unified vision-language-action (VLA) policy and a practical human-data capture setup for universal dexterous hand control. First, we construct UniDex-Dataset, a robot-centric dataset over 50K trajectories across eight dexterous hands (6--24 DoFs), derived from egocentric human video datasets. To transform human data into robot-executable trajectories, we employ a human-in-the-loop retargeting procedure to align fingertip trajectories while preserving plausible hand-object contacts, and we operate on explicit 3D pointclouds with human hands masked to narrow kinematic and visual gaps. Second, we introduce the Function-Actuator-Aligned Space (FAAS), a unified action space that maps functionally similar actuators to shared coordinates, enabling cross-hand transfer. Leveraging FAAS as the action parameterization, we train UniDex-VLA, a 3D VLA policy pretrained on UniDex-Dataset and finetuned with task demonstrations. In addition, we build UniDex-Cap, a simple portable capture setup that records synchronized RGB-D streams and human hand poses and converts them into robot-executable trajectories to enable human-robot data co-training that reduces reliance on costly robot demonstrations. On challenging tool-use tasks across two different hands, UniDex-VLA achieves 81% average task progress and outperforms prior VLA baselines by a large margin, while exhibiting strong spatial, object, and zero-shot cross-hand generalization. Together, UniDex-Dataset, UniDex-VLA, and UniDex-Cap provide a scalable foundation suite for universal dexterous manipulation.
ArrayTac: A tactile display for simultaneous rendering of shape, stiffness and friction
Mar 14, 2026Human-computer interaction in the visual and auditory domains has achieved considerable maturity, yet machine-to-human tactile feedback remains underdeveloped. Existing tactile displays struggle to simultaneously render multiple tactile dimensions, such as shape, stiffness, and friction, which limits the realism of haptic simulation. Here, we present ArrayTac, a piezoelectric-driven tactile display capable of simultaneously rendering shape, stiffness, and friction to reproduce realistic haptic signals. The system comprises a 4x4 array of 16 actuator units, each employing a three-stage micro-lever mechanism to amplify the micrometer-scale displacement of the piezoelectric element, with Hall sensor-based closed-loop control at the end effector to enhance response speed and precision. We further implement two end-to-end pipelines: 1) a vision-to-touch framework that converts visual inputs into tactile signals using multimodal foundation models, and 2) a real-time tele-palpation system operating over distances of several thousand kilometers. In user studies, first-time participants accurately identify object shapes and physical properties with high success rates. In a tele-palpation experiment over 1,000km, untrained volunteers correctly identified both the number and type of tumors in a breast phantom with 100% accuracy and precisely localized their positions. The system pioneers a new pathway for high-fidelity haptic feedback by introducing the unprecedented capability to simultaneously render an object's shape, stiffness, and friction, delivering a holistic tactile experience that was previously unattainable.
MoE-DP: An MoE-Enhanced Diffusion Policy for Robust Long-Horizon Robotic Manipulation with Skill Decomposition and Failure Recovery
Nov 07, 2025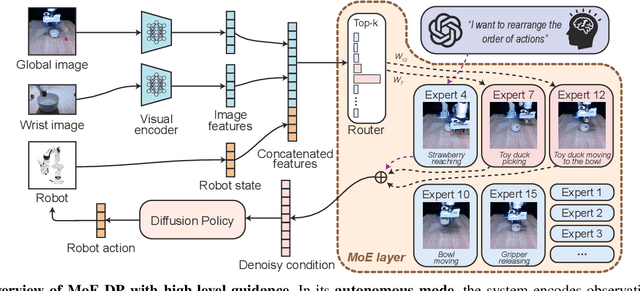
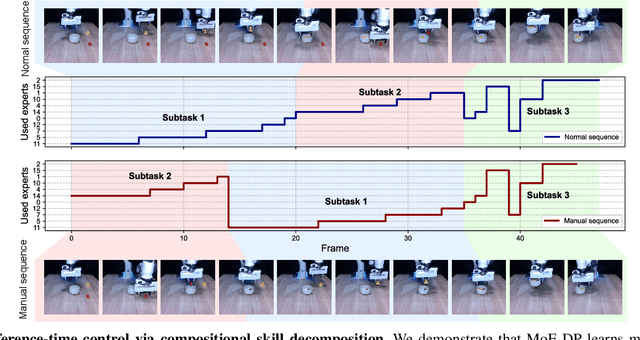
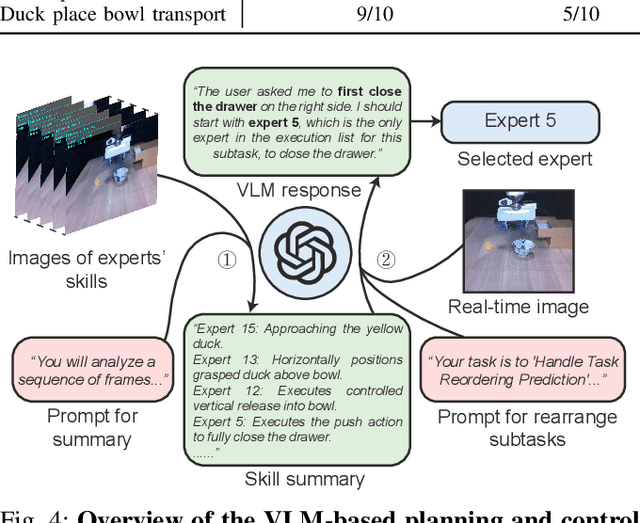
Diffusion policies have emerged as a powerful framework for robotic visuomotor control, yet they often lack the robustness to recover from subtask failures in long-horizon, multi-stage tasks and their learned representations of observations are often difficult to interpret. In this work, we propose the Mixture of Experts-Enhanced Diffusion Policy (MoE-DP), where the core idea is to insert a Mixture of Experts (MoE) layer between the visual encoder and the diffusion model. This layer decomposes the policy's knowledge into a set of specialized experts, which are dynamically activated to handle different phases of a task. We demonstrate through extensive experiments that MoE-DP exhibits a strong capability to recover from disturbances, significantly outperforming standard baselines in robustness. On a suite of 6 long-horizon simulation tasks, this leads to a 36% average relative improvement in success rate under disturbed conditions. This enhanced robustness is further validated in the real world, where MoE-DP also shows significant performance gains. We further show that MoE-DP learns an interpretable skill decomposition, where distinct experts correspond to semantic task primitives (e.g., approaching, grasping). This learned structure can be leveraged for inference-time control, allowing for the rearrangement of subtasks without any re-training.Our video and code are available at the https://moe-dp-website.github.io/MoE-DP-Website/.
HERMES: Human-to-Robot Embodied Learning from Multi-Source Motion Data for Mobile Dexterous Manipulation
Aug 28, 2025Leveraging human motion data to impart robots with versatile manipulation skills has emerged as a promising paradigm in robotic manipulation. Nevertheless, translating multi-source human hand motions into feasible robot behaviors remains challenging, particularly for robots equipped with multi-fingered dexterous hands characterized by complex, high-dimensional action spaces. Moreover, existing approaches often struggle to produce policies capable of adapting to diverse environmental conditions. In this paper, we introduce HERMES, a human-to-robot learning framework for mobile bimanual dexterous manipulation. First, HERMES formulates a unified reinforcement learning approach capable of seamlessly transforming heterogeneous human hand motions from multiple sources into physically plausible robotic behaviors. Subsequently, to mitigate the sim2real gap, we devise an end-to-end, depth image-based sim2real transfer method for improved generalization to real-world scenarios. Furthermore, to enable autonomous operation in varied and unstructured environments, we augment the navigation foundation model with a closed-loop Perspective-n-Point (PnP) localization mechanism, ensuring precise alignment of visual goals and effectively bridging autonomous navigation and dexterous manipulation. Extensive experimental results demonstrate that HERMES consistently exhibits generalizable behaviors across diverse, in-the-wild scenarios, successfully performing numerous complex mobile bimanual dexterous manipulation tasks. Project Page:https://gemcollector.github.io/HERMES/.
MENTOR: Mixture-of-Experts Network with Task-Oriented Perturbation for Visual Reinforcement Learning
Oct 19, 2024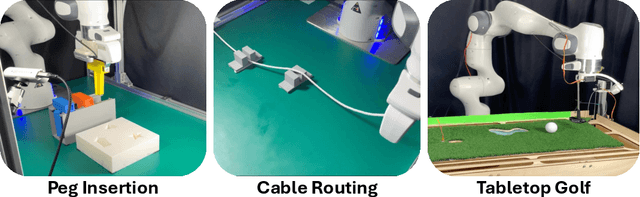
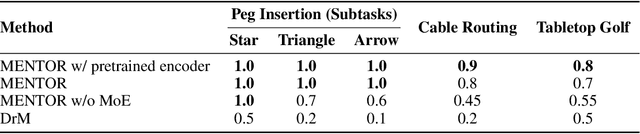
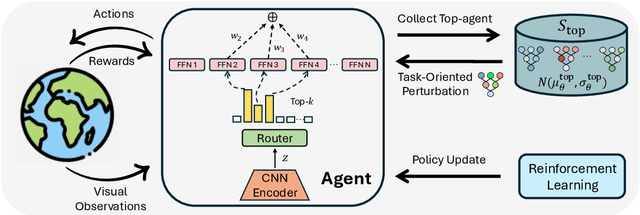
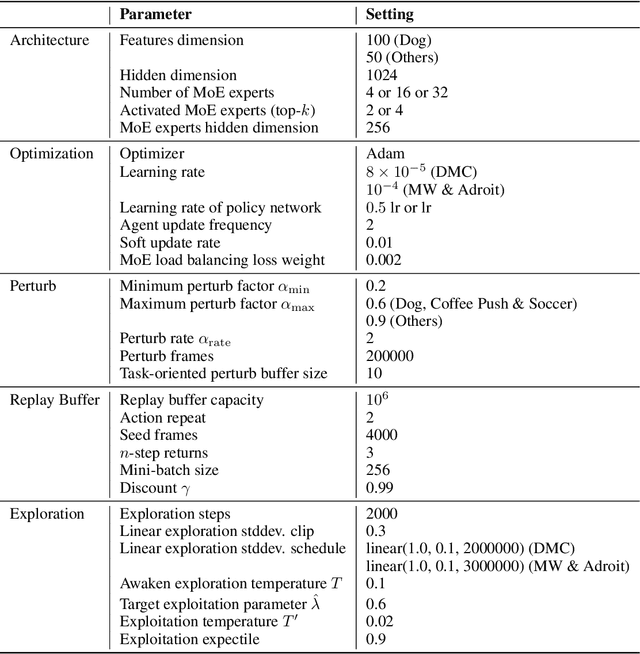
Visual deep reinforcement learning (RL) enables robots to acquire skills from visual input for unstructured tasks. However, current algorithms suffer from low sample efficiency, limiting their practical applicability. In this work, we present MENTOR, a method that improves both the architecture and optimization of RL agents. Specifically, MENTOR replaces the standard multi-layer perceptron (MLP) with a mixture-of-experts (MoE) backbone, enhancing the agent's ability to handle complex tasks by leveraging modular expert learning to avoid gradient conflicts. Furthermore, MENTOR introduces a task-oriented perturbation mechanism, which heuristically samples perturbation candidates containing task-relevant information, leading to more targeted and effective optimization. MENTOR outperforms state-of-the-art methods across three simulation domains -- DeepMind Control Suite, Meta-World, and Adroit. Additionally, MENTOR achieves an average of 83% success rate on three challenging real-world robotic manipulation tasks including peg insertion, cable routing, and tabletop golf, which significantly surpasses the success rate of 32% from the current strongest model-free visual RL algorithm. These results underscore the importance of sample efficiency in advancing visual RL for real-world robotics. Experimental videos are available at https://suninghuang19.github.io/mentor_page.
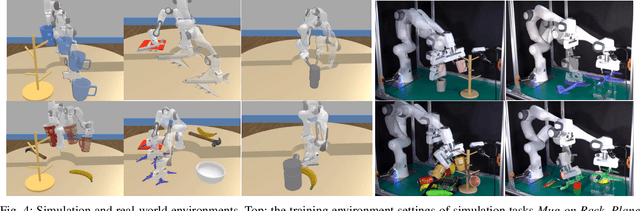
Catch It! Learning to Catch in Flight with Mobile Dexterous Hands
Sep 16, 2024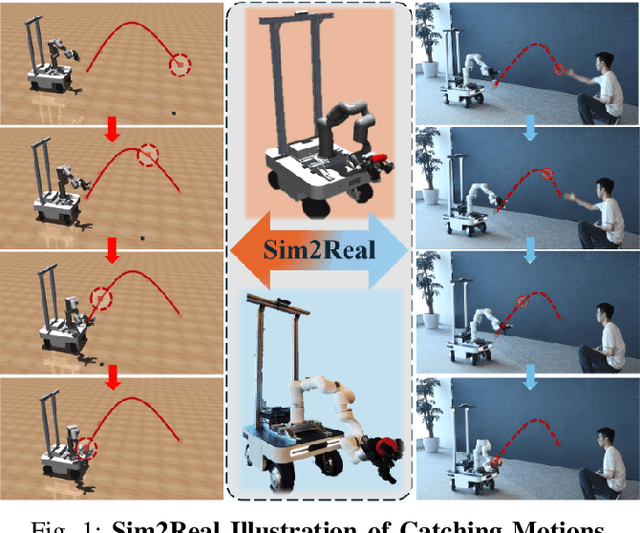

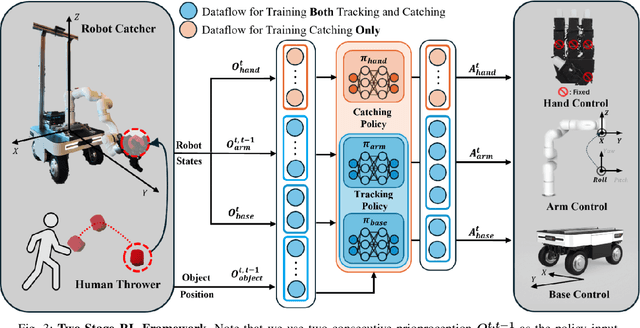
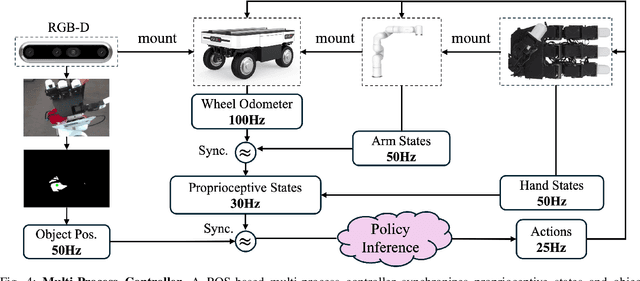
Catching objects in flight (i.e., thrown objects) is a common daily skill for humans, yet it presents a significant challenge for robots. This task requires a robot with agile and accurate motion, a large spatial workspace, and the ability to interact with diverse objects. In this paper, we build a mobile manipulator composed of a mobile base, a 6-DoF arm, and a 12-DoF dexterous hand to tackle such a challenging task. We propose a two-stage reinforcement learning framework to efficiently train a whole-body-control catching policy for this high-DoF system in simulation. The objects' throwing configurations, shapes, and sizes are randomized during training to enhance policy adaptivity to various trajectories and object characteristics in flight. The results show that our trained policy catches diverse objects with randomly thrown trajectories, at a high success rate of about 80\% in simulation, with a significant improvement over the baselines. The policy trained in simulation can be directly deployed in the real world with onboard sensing and computation, which achieves catching sandbags in various shapes, randomly thrown by humans. Our project page is available at https://mobile-dex-catch.github.io/.
RiEMann: Near Real-Time SE-Equivariant Robot Manipulation without Point Cloud Segmentation
Mar 28, 2024


We present RiEMann, an end-to-end near Real-time SE(3)-Equivariant Robot Manipulation imitation learning framework from scene point cloud input. Compared to previous methods that rely on descriptor field matching, RiEMann directly predicts the target poses of objects for manipulation without any object segmentation. RiEMann learns a manipulation task from scratch with 5 to 10 demonstrations, generalizes to unseen SE(3) transformations and instances of target objects, resists visual interference of distracting objects, and follows the near real-time pose change of the target object. The scalable action space of RiEMann facilitates the addition of custom equivariant actions such as the direction of turning the faucet, which makes articulated object manipulation possible for RiEMann. In simulation and real-world 6-DOF robot manipulation experiments, we test RiEMann on 5 categories of manipulation tasks with a total of 25 variants and show that RiEMann outperforms baselines in both task success rates and SE(3) geodesic distance errors on predicted poses (reduced by 68.6%), and achieves a 5.4 frames per second (FPS) network inference speed. Code and video results are available at https://riemann-web.github.io/.
ClothesNet: An Information-Rich 3D Garment Model Repository with Simulated Clothes Environment
Aug 19, 2023
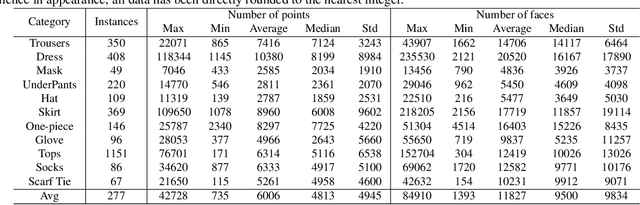

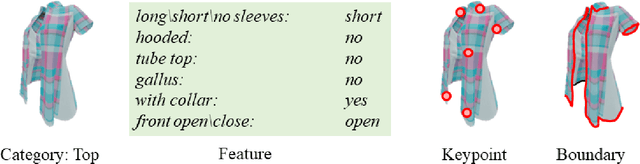
We present ClothesNet: a large-scale dataset of 3D clothes objects with information-rich annotations. Our dataset consists of around 4400 models covering 11 categories annotated with clothes features, boundary lines, and keypoints. ClothesNet can be used to facilitate a variety of computer vision and robot interaction tasks. Using our dataset, we establish benchmark tasks for clothes perception, including classification, boundary line segmentation, and keypoint detection, and develop simulated clothes environments for robotic interaction tasks, including rearranging, folding, hanging, and dressing. We also demonstrate the efficacy of our ClothesNet in real-world experiments. Supplemental materials and dataset are available on our project webpage.