 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantized SO(3)-Equivariant Graph Neural Networks for Efficient Molecular Property Prediction
Jan 05, 2026Deploying 3D graph neural networks (GNNs) that are equivariant to 3D rotations (the group SO(3)) on edge devices is challenging due to their high computational cost. This paper addresses the problem by compressing and accelerating an SO(3)-equivariant GNN using low-bit quantization techniques. Specifically, we introduce three innovations for quantized equivariant transformers: (1) a magnitude-direction decoupled quantization scheme that separately quantizes the norm and orientation of equivariant (vector) features, (2) a branch-separated quantization-aware training strategy that treats invariant and equivariant feature channels differently in an attention-based $SO(3)$-GNN, and (3) a robustness-enhancing attention normalization mechanism that stabilizes low-precision attention computations. Experiments on the QM9 and rMD17 molecular benchmarks demonstrate that our 8-bit models achieve accuracy on energy and force predictions comparable to full-precision baselines with markedly improved efficiency. We also conduct ablation studies to quantify the contribution of each component to maintain accuracy and equivariance under quantization, using the Local error of equivariance (LEE) metric. The proposed techniques enable the deployment of symmetry-aware GNNs in practical chemistry applications with 2.37--2.73x faster inference and 4x smaller model size, without sacrificing accuracy or physical symmetry.
Dr.Academy: A Benchmark for Evaluating Questioning Capability in Education for Large Language Models
Aug 20, 2024



Teachers are important to imparting knowledge and guiding learners, and the role of large language models (LLMs) as potential educators is emerging as an important area of study. Recognizing LLMs' capability to generate educational content can lead to advances in automated and personalized learning. While LLMs have been tested for their comprehension and problem-solving skills, their capability in teaching remains largely unexplored. In teaching, questioning is a key skill that guides students to analyze, evaluate, and synthesize core concepts and principles. Therefore, our research introduces a benchmark to evaluate the questioning capability in education as a teacher of LLMs through evaluating their generated educational questions, utilizing Anderson and Krathwohl's taxonomy across general, monodisciplinary, and interdisciplinary domains. We shift the focus from LLMs as learners to LLMs as educators, assessing their teaching capability through guiding them to generate questions. We apply four metrics, including relevance, coverage, representativeness, and consistency, to evaluate the educational quality of LLMs' outputs. Our results indicate that GPT-4 demonstrates significant potential in teaching general, humanities, and science courses; Claude2 appears more apt as an interdisciplinary teacher. Furthermore, the automatic scores align with human perspectives.
ManiFoundation Model for General-Purpose Robotic Manipulation of Contact Synthesis with Arbitrary Objects and Robots
May 11, 2024
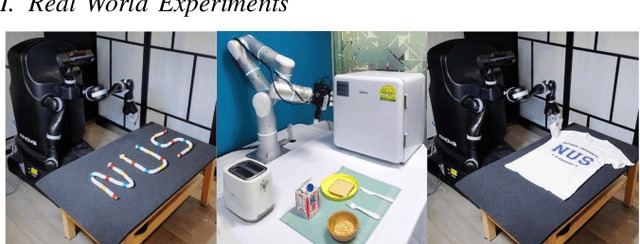
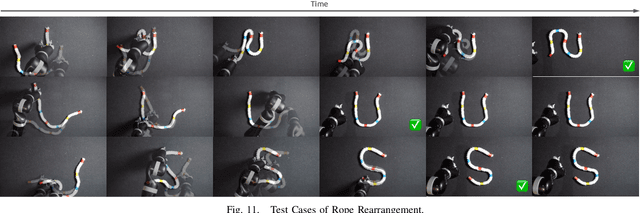
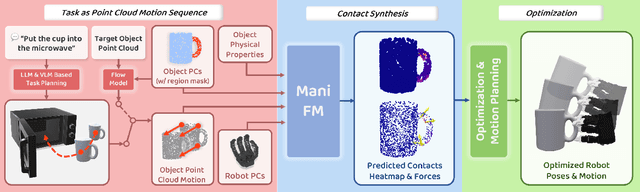
To substantially enhance robot intelligence, there is a pressing need to develop a large model that enables general-purpose robots to proficiently undertake a broad spectrum of manipulation tasks, akin to the versatile task-planning ability exhibited by LLMs. The vast diversity in objects, robots, and manipulation tasks presents huge challenges. Our work introduces a comprehensive framework to develop a foundation model for general robotic manipulation that formalizes a manipulation task as contact synthesis. Specifically, our model takes as input object and robot manipulator point clouds, object physical attributes, target motions, and manipulation region masks. It outputs contact points on the object and associated contact forces or post-contact motions for robots to achieve the desired manipulation task. We perform extensive experiments both in the simulation and real-world settings, manipulating articulated rigid objects, rigid objects, and deformable objects that vary in dimensionality, ranging from one-dimensional objects like ropes to two-dimensional objects like cloth and extending to three-dimensional objects such as plasticine. Our model achieves average success rates of around 90\%. Supplementary materials and videos are available on our project website at https://manifoundationmodel.github.io/.
Generalizable Long-Horizon Manipulations with Large Language Models
Oct 03, 2023This work introduces a framework harnessing the capabilities of Large Language Models (LLMs) to generate primitive task conditions for generalizable long-horizon manipulations with novel objects and unseen tasks. These task conditions serve as guides for the generation and adjustment of Dynamic Movement Primitives (DMP) trajectories for long-horizon task execution. We further create a challenging robotic manipulation task suite based on Pybullet for long-horizon task evaluation. Extensive experiments in both simulated and real-world environments demonstrate the effectiveness of our framework on both familiar tasks involving new objects and novel but related tasks, highlighting the potential of LLMs in enhancing robotic system versatility and adaptability. Project website: https://object814.github.io/Task-Condition-With-LLM/
ClothesNet: An Information-Rich 3D Garment Model Repository with Simulated Clothes Environment
Aug 19, 2023
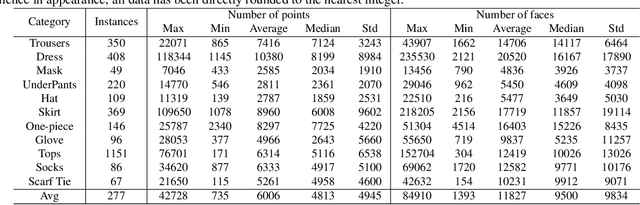

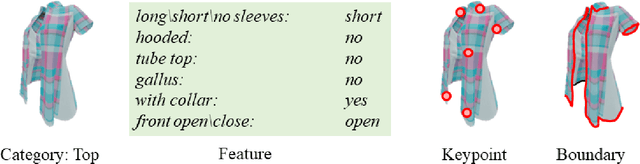
We present ClothesNet: a large-scale dataset of 3D clothes objects with information-rich annotations. Our dataset consists of around 4400 models covering 11 categories annotated with clothes features, boundary lines, and keypoints. ClothesNet can be used to facilitate a variety of computer vision and robot interaction tasks. Using our dataset, we establish benchmark tasks for clothes perception, including classification, boundary line segmentation, and keypoint detection, and develop simulated clothes environments for robotic interaction tasks, including rearranging, folding, hanging, and dressing. We also demonstrate the efficacy of our ClothesNet in real-world experiments. Supplemental materials and dataset are available on our project webpage.