 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniDex: A Robot Foundation Suite for Universal Dexterous Hand Control from Egocentric Human Videos
Mar 23, 2026Dexterous manipulation remains challenging due to the cost of collecting real-robot teleoperation data, the heterogeneity of hand embodiments, and the high dimensionality of control. We present UniDex, a robot foundation suite that couples a large-scale robot-centric dataset with a unified vision-language-action (VLA) policy and a practical human-data capture setup for universal dexterous hand control. First, we construct UniDex-Dataset, a robot-centric dataset over 50K trajectories across eight dexterous hands (6--24 DoFs), derived from egocentric human video datasets. To transform human data into robot-executable trajectories, we employ a human-in-the-loop retargeting procedure to align fingertip trajectories while preserving plausible hand-object contacts, and we operate on explicit 3D pointclouds with human hands masked to narrow kinematic and visual gaps. Second, we introduce the Function-Actuator-Aligned Space (FAAS), a unified action space that maps functionally similar actuators to shared coordinates, enabling cross-hand transfer. Leveraging FAAS as the action parameterization, we train UniDex-VLA, a 3D VLA policy pretrained on UniDex-Dataset and finetuned with task demonstrations. In addition, we build UniDex-Cap, a simple portable capture setup that records synchronized RGB-D streams and human hand poses and converts them into robot-executable trajectories to enable human-robot data co-training that reduces reliance on costly robot demonstrations. On challenging tool-use tasks across two different hands, UniDex-VLA achieves 81% average task progress and outperforms prior VLA baselines by a large margin, while exhibiting strong spatial, object, and zero-shot cross-hand generalization. Together, UniDex-Dataset, UniDex-VLA, and UniDex-Cap provide a scalable foundation suite for universal dexterous manipulation.
Mobile-TeleVision: Predictive Motion Priors for Humanoid Whole-Body Control
Dec 10, 2024



Humanoid robots require both robust lower-body locomotion and precise upper-body manipulation. While recent Reinforcement Learning (RL) approaches provide whole-body loco-manipulation policies, they lack precise manipulation with high DoF arms. In this paper, we propose decoupling upper-body control from locomotion, using inverse kinematics (IK) and motion retargeting for precise manipulation, while RL focuses on robust lower-body locomotion. We introduce PMP (Predictive Motion Priors), trained with Conditional Variational Autoencoder (CVAE) to effectively represent upper-body motions. The locomotion policy is trained conditioned on this upper-body motion representation, ensuring that the system remains robust with both manipulation and locomotion. We show that CVAE features are crucial for stability and robustness, and significantly outperforms RL-based whole-body control in precise manipulation. With precise upper-body motion and robust lower-body locomotion control, operators can remotely control the humanoid to walk around and explore different environments, while performing diverse manipulation tasks.
MENTOR: Mixture-of-Experts Network with Task-Oriented Perturbation for Visual Reinforcement Learning
Oct 19, 2024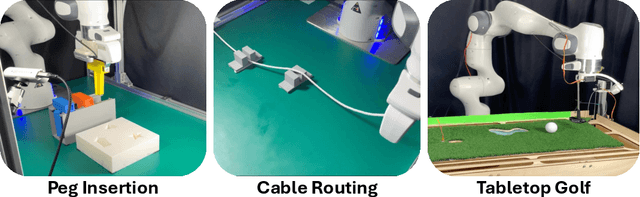
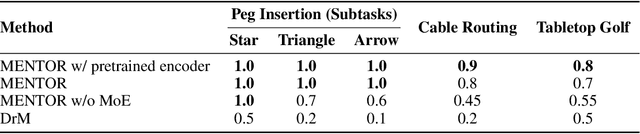
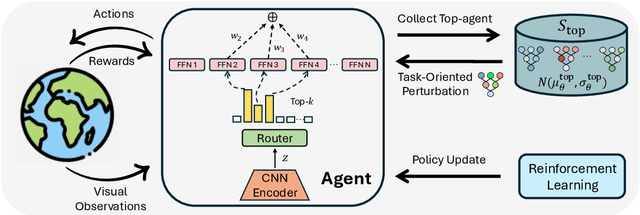
Visual deep reinforcement learning (RL) enables robots to acquire skills from visual input for unstructured tasks. However, current algorithms suffer from low sample efficiency, limiting their practical applicability. In this work, we present MENTOR, a method that improves both the architecture and optimization of RL agents. Specifically, MENTOR replaces the standard multi-layer perceptron (MLP) with a mixture-of-experts (MoE) backbone, enhancing the agent's ability to handle complex tasks by leveraging modular expert learning to avoid gradient conflicts. Furthermore, MENTOR introduces a task-oriented perturbation mechanism, which heuristically samples perturbation candidates containing task-relevant information, leading to more targeted and effective optimization. MENTOR outperforms state-of-the-art methods across three simulation domains -- DeepMind Control Suite, Meta-World, and Adroit. Additionally, MENTOR achieves an average of 83% success rate on three challenging real-world robotic manipulation tasks including peg insertion, cable routing, and tabletop golf, which significantly surpasses the success rate of 32% from the current strongest model-free visual RL algorithm. These results underscore the importance of sample efficiency in advancing visual RL for real-world robotics. Experimental videos are available at https://suninghuang19.github.io/mentor_page.
Rethinking Transformers in Solving POMDPs
May 30, 2024



Sequential decision-making algorithms such as reinforcement learning (RL) in real-world scenarios inevitably face environments with partial observability. This paper scrutinizes the effectiveness of a popular architecture, namely Transformers, in Partially Observable Markov Decision Processes (POMDPs) and reveals its theoretical limitations. We establish that regular languages, which Transformers struggle to model, are reducible to POMDPs. This poses a significant challenge for Transformers in learning POMDP-specific inductive biases, due to their lack of inherent recurrence found in other models like RNNs. This paper casts doubt on the prevalent belief in Transformers as sequence models for RL and proposes to introduce a point-wise recurrent structure. The Deep Linear Recurrent Unit (LRU) emerges as a well-suited alternative for Partially Observable RL, with empirical results highlighting the sub-optimal performance of the Transformer and considerable strength of LRU.
Uni-O4: Unifying Online and Offline Deep Reinforcement Learning with Multi-Step On-Policy Optimization
Nov 06, 2023Combining offline and online reinforcement learning (RL) is crucial for efficient and safe learning. However, previous approaches treat offline and online learning as separate procedures, resulting in redundant designs and limited performance. We ask: Can we achieve straightforward yet effective offline and online learning without introducing extra conservatism or regularization? In this study, we propose Uni-o4, which utilizes an on-policy objective for both offline and online learning. Owning to the alignment of objectives in two phases, the RL agent can transfer between offline and online learning seamlessly. This property enhances the flexibility of the learning paradigm, allowing for arbitrary combinations of pretraining, fine-tuning, offline, and online learning. In the offline phase, specifically, Uni-o4 leverages diverse ensemble policies to address the mismatch issues between the estimated behavior policy and the offline dataset. Through a simple offline policy evaluation (OPE) approach, Uni-o4 can achieve multi-step policy improvement safely. We demonstrate that by employing the method above, the fusion of these two paradigms can yield superior offline initialization as well as stable and rapid online fine-tuning capabilities. Through real-world robot tasks, we highlight the benefits of this paradigm for rapid deployment in challenging, previously unseen real-world environments. Additionally, through comprehensive evaluations using numerous simulated benchmarks, we substantiate that our method achieves state-of-the-art performance in both offline and offline-to-online fine-tuning learning. Our website: https://lei-kun.github.io/uni-o4/ .