 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Robot Hands from Human Demonstrations
Jun 18, 2026Robot learning has advanced rapidly in learning control, but learning the physical body of a robot remains much more difficult because jointly searching over design and control creates a very large combinatorial problem. Here, we present a data-driven framework for generating robot hands from human demonstrations. Instead of learning a complex controller together with each candidate design, we generate robot hand designs using the same simple control policy used after fabrication: matching fingertip positions through inverse kinematics. Using more than 4 million frames of human fingertip motion from everyday manipulation, our algorithm optimizes tree-structured robot hands to reproduce desired target motions. The framework produced both a 6-degree-of-freedom (DoF) general-purpose hand and lower-DoF task-specific hands with spatial four-bar mimic joints. To accelerate the search over designs, we trained a reinforcement-learning (RL) actor to propose good hand designs and joint angles, reducing search time from hours to minutes. We fabricated the mechanisms directly as one-piece articulated structures with print-in-place joints. In real-world experiments, the 6-DoF hand achieved highly accurate teleoperated fingertip tracking better than available commercial robot hands, whereas the specialized 3-DoF hands reproduced structured human and synthetic trajectories with reduced mechanical complexity. These results showed that large-scale human motion data can be used not only to train robot controllers but also as a reference for optimizing and generating the physical embodiment of robots.
TacO: Benchmarking Tactile Sensors for Object Manipulation
May 21, 2026Vision-based learning from demonstrations has achieved remarkable success in enabling robots to perform manipulation tasks and high-level semantic reasoning, yet it remains insufficient for complex, contact-rich manipulation. While there is broad agreement that tactile sensing improves manipulation, there is no empirical guidance on which tactile sensors are best suited for which manipulation tasks. In this paper, we provide a systematic, task-driven evaluation of tactile sensors for robot manipulation and propose a framework for selecting and evaluating sensors based on manipulation policy performance. Separate manipulation policies are trained for tactile sensors of four distinct modalities: visual, acoustic, magnetic, and resistive, across three tasks: pick-and-place with unknown mass, object reorientation, and plug insertion. For each task, an analysis of how sensor properties such as spatial resolution, shear sensing, and tactile representation, and the inherent material friction affect task performances is done. Rather than tactile sensing being universally beneficial in the same way, our results show that the usefulness of tactile information depends strongly on sensor modality, material properties, and the specific manipulation tasks. All of the tactile sensors, code, data, and hardware setup will be publicly available on the project website.
Long-Horizon Manipulation via Trace-Conditioned VLA Planning
Apr 23, 2026Long-horizon manipulation remains challenging for vision-language-action (VLA) policies: real tasks are multi-step, progress-dependent, and brittle to compounding execution errors. We present LoHo-Manip, a modular framework that scales short-horizon VLA execution to long-horizon instruction following via a dedicated task-management VLM. The manager is decoupled from the executor and is invoked in a receding-horizon manner: given the current observation, it predicts a progress-aware remaining plan that combines (i) a subtask sequence with an explicit done + remaining split as lightweight language memory, and (ii) a visual trace -- a compact 2D keypoint trajectory prompt specifying where to go and what to approach next. The executor VLA is adapted to condition on the rendered trace, thereby turning long-horizon decision-making into repeated local control by following the trace. Crucially, predicting the remaining plan at each step yields an implicit closed loop: failed steps persist in subsequent outputs, and traces update accordingly, enabling automatic continuation and replanning without hand-crafted recovery logic or brittle visual-history buffers. Extensive experiments spanning embodied planning, long-horizon reasoning, trajectory prediction, and end-to-end manipulation in simulation and on a real Franka robot demonstrate strong gains in long-horizon success, robustness, and out-of-distribution generalization. Project page: https://www.liuisabella.com/LoHoManip
Contact-Aware Neural Dynamics
Jan 19, 2026High-fidelity physics simulation is essential for scalable robotic learning, but the sim-to-real gap persists, especially for tasks involving complex, dynamic, and discontinuous interactions like physical contacts. Explicit system identification, which tunes explicit simulator parameters, is often insufficient to align the intricate, high-dimensional, and state-dependent dynamics of the real world. To overcome this, we propose an implicit sim-to-real alignment framework that learns to directly align the simulator's dynamics with contact information. Our method treats the off-the-shelf simulator as a base prior and learns a contact-aware neural dynamics model to refine simulated states using real-world observations. We show that using tactile contact information from robotic hands can effectively model the non-smooth discontinuities inherent in contact-rich tasks, resulting in a neural dynamics model grounded by real-world data. We demonstrate that this learned forward dynamics model improves state prediction accuracy and can be effectively used to predict policy performance and refine policies trained purely in standard simulators, offering a scalable, data-driven approach to sim-to-real alignment.
Co-Design of Soft Gripper with Neural Physics
May 26, 2025



For robot manipulation, both the controller and end-effector design are crucial. Soft grippers are generalizable by deforming to different geometries, but designing such a gripper and finding its grasp pose remains challenging. In this paper, we propose a co-design framework that generates an optimized soft gripper's block-wise stiffness distribution and its grasping pose, using a neural physics model trained in simulation. We derived a uniform-pressure tendon model for a flexure-based soft finger, then generated a diverse dataset by randomizing both gripper pose and design parameters. A neural network is trained to approximate this forward simulation, yielding a fast, differentiable surrogate. We embed that surrogate in an end-to-end optimization loop to optimize the ideal stiffness configuration and best grasp pose. Finally, we 3D-print the optimized grippers of various stiffness by changing the structural parameters. We demonstrate that our co-designed grippers significantly outperform baseline designs in both simulation and hardware experiments.
Humanoid Policy ~ Human Policy
Mar 17, 2025Training manipulation policies for humanoid robots with diverse data enhances their robustness and generalization across tasks and platforms. However, learning solely from robot demonstrations is labor-intensive, requiring expensive tele-operated data collection which is difficult to scale. This paper investigates a more scalable data source, egocentric human demonstrations, to serve as cross-embodiment training data for robot learning. We mitigate the embodiment gap between humanoids and humans from both the data and modeling perspectives. We collect an egocentric task-oriented dataset (PH2D) that is directly aligned with humanoid manipulation demonstrations. We then train a human-humanoid behavior policy, which we term Human Action Transformer (HAT). The state-action space of HAT is unified for both humans and humanoid robots and can be differentiably retargeted to robot actions. Co-trained with smaller-scale robot data, HAT directly models humanoid robots and humans as different embodiments without additional supervision. We show that human data improves both generalization and robustness of HAT with significantly better data collection efficiency. Code and data: https://human-as-robot.github.io/
Mobile-TeleVision: Predictive Motion Priors for Humanoid Whole-Body Control
Dec 10, 2024



Humanoid robots require both robust lower-body locomotion and precise upper-body manipulation. While recent Reinforcement Learning (RL) approaches provide whole-body loco-manipulation policies, they lack precise manipulation with high DoF arms. In this paper, we propose decoupling upper-body control from locomotion, using inverse kinematics (IK) and motion retargeting for precise manipulation, while RL focuses on robust lower-body locomotion. We introduce PMP (Predictive Motion Priors), trained with Conditional Variational Autoencoder (CVAE) to effectively represent upper-body motions. The locomotion policy is trained conditioned on this upper-body motion representation, ensuring that the system remains robust with both manipulation and locomotion. We show that CVAE features are crucial for stability and robustness, and significantly outperforms RL-based whole-body control in precise manipulation. With precise upper-body motion and robust lower-body locomotion control, operators can remotely control the humanoid to walk around and explore different environments, while performing diverse manipulation tasks.
ACE: A Cross-Platform Visual-Exoskeletons System for Low-Cost Dexterous Teleoperation
Aug 21, 2024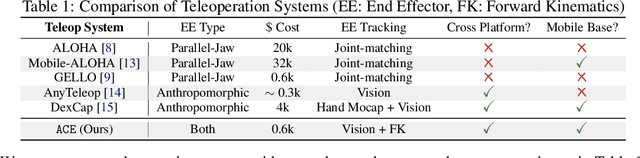

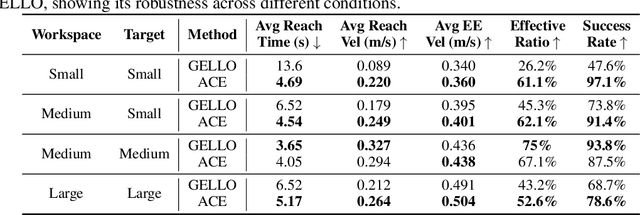

Learning from demonstrations has shown to be an effective approach to robotic manipulation, especially with the recently collected large-scale robot data with teleoperation systems. Building an efficient teleoperation system across diverse robot platforms has become more crucial than ever. However, there is a notable lack of cost-effective and user-friendly teleoperation systems for different end-effectors, e.g., anthropomorphic robot hands and grippers, that can operate across multiple platforms. To address this issue, we develop ACE, a cross-platform visual-exoskeleton system for low-cost dexterous teleoperation. Our system utilizes a hand-facing camera to capture 3D hand poses and an exoskeleton mounted on a portable base, enabling accurate real-time capture of both finger and wrist poses. Compared to previous systems, which often require hardware customization according to different robots, our single system can generalize to humanoid hands, arm-hands, arm-gripper, and quadruped-gripper systems with high-precision teleoperation. This enables imitation learning for complex manipulation tasks on diverse platforms.
Decentralized Multi-Robot Line-of-Sight Connectivity Maintenance under Uncertainty
Jun 18, 2024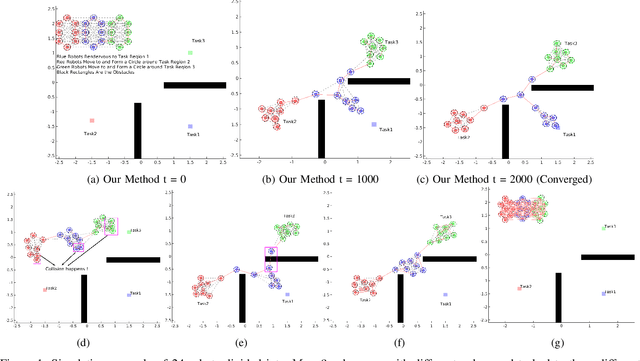



In this paper, we propose a novel decentralized control method to maintain Line-of-Sight connectivity for multi-robot networks in the presence of Guassian-distributed localization uncertainty. In contrast to most existing work that assumes perfect positional information about robots or enforces overly restrictive rigid formation against uncertainty, our method enables robots to preserve Line-of-Sight connectivity with high probability under unbounded Gaussian-like positional noises while remaining minimally intrusive to the original robots' tasks. This is achieved by a motion coordination framework that jointly optimizes the set of existing Line-of-Sight edges to preserve and control revisions to the nominal task-related controllers, subject to the safety constraints and the corresponding composition of uncertainty-aware Line-of-Sight control constraints. Such compositional control constraints, expressed by our novel notion of probabilistic Line-of-Sight connectivity barrier certificates (PrLOS-CBC) for pairwise robots using control barrier functions, explicitly characterize the deterministic admissible control space for the two robots. The resulting motion ensures Line-of-Sight connectedness for the robot team with high probability. Furthermore, we propose a fully decentralized algorithm that decomposes the motion coordination framework by interleaving the composite constraint specification and solving for the resulting optimization-based controllers. The optimality of our approach is justified by the theoretical proofs. Simulation and real-world experiments results are given to demonstrate the effectiveness of our method.
Reconfigurable Robot Control Using Flexible Coupling Mechanisms
Jun 28, 2023Reconfigurable robot swarms are capable of connecting with each other to form complex structures. Current mechanical or magnetic connection mechanisms can be complicated to manufacture, consume high power, have a limited load-bearing capacity, or can only form rigid structures. In this paper, we present our low-cost soft anchor design that enables flexible coupling and decoupling between robots. Our asymmetric anchor requires minimal force to be pushed into the opening of another robot while having a strong pulling force so that the connection between robots can be secured. To maintain this flexible coupling mechanism as an assembled structure, we present our Model Predictive Control (MPC) frameworks with polygon constraints to model the geometric relationship between robots. We conducted experiments on the soft anchor to obtain its force profile, which informed the three-bar linkage model of the anchor in the simulations. We show that the proposed mechanism and MPC frameworks enable the robots to couple, decouple, and perform various behaviors in both the simulation environment and hardware platform. Our code is available at https://github.com/ZoomLabCMU/puzzlebot_anchor . Video is available at https://www.youtube.com/watch?v=R3gFplorCJg .