Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConfiguration Control for Physical Coupling of Heterogeneous Robot Swarms
Paper and Code
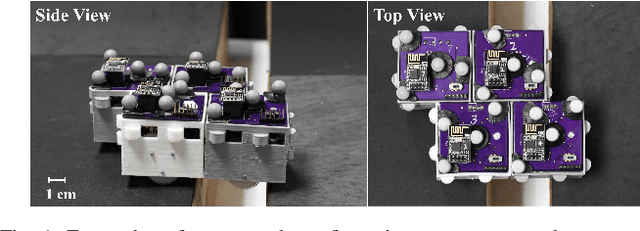
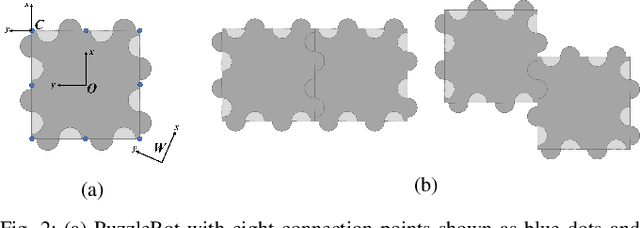
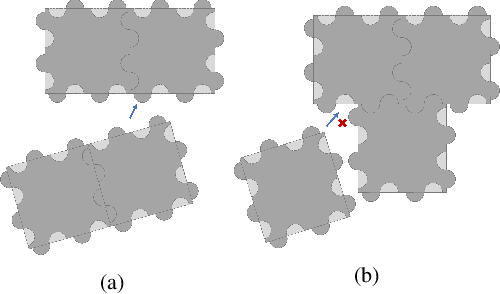
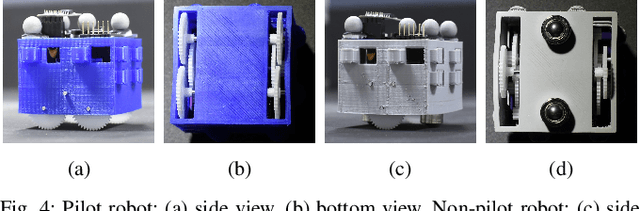
In this paper, we present a heterogeneous robot swarm system that can physically couple with each other to form functional structures and dynamically decouple to perform individual tasks. The connection between robots can be formed with a passive coupling mechanism, ensuring minimum energy consumption during coupling and decoupling behavior. The heterogeneity of the system enables the robots to perform structural enhancement configurations based on specific environmental requirements. We propose a connection-pair oriented configuration control algorithm to form different assemblies. We show experiments of up to nine robots performing the coupling, gap-crossing, and decoupling behaviors.
View paper on