 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTerraSkipper: A Centimeter-Scale Robot for Multi-Terrain Skipping and Crawling
Mar 29, 2026Mudskippers are unique amphibious fish capable of locomotion in diverse environments, including terrestrial surfaces, aquatic habitats, and highly viscous substrates such as mud. This versatile locomotion is largely enabled by their powerful tail, which stores and rapidly releases energy to produce impulsive jumps. Inspired by this biological mechanism, we present the design and development of a multi-terrain centimeter-scale skipping and crawling robot. The robot is predominantly 3D printed and features onboard sensing, computation, and power. It is equipped with two side fins for crawling, each integrated with a hall effect sensor for gait control, while a rotary springtail driven by a 10mm planetary gear motor enables continuous impulsive skipping across a range of substrates to achieve multi-terrain locomotion. We modeled and experimentally characterized the tail, identifying an optimal length of 25mm that maximizes the mean propulsive force (4N, peaks up to 6N) for forward motion. In addition, we evaluated skipping on substrates where fin based crawling alone fails, and varied the moisture content of uniform sand and bentonite clay powder to compare skipping with crawling. Skipping consistently produced higher mean velocities than crawling, particularly on viscous and granular media. Finally, outdoor tests on grass, loose sand, and hard ground confirmed that combining skipping on entangling and granular terrain with crawling on firm ground extends the operational range of the robot in real-world environments.
PuffyBot: An Untethered Shape Morphing Robot for Multi-environment Locomotion
Nov 13, 2025Amphibians adapt their morphologies and motions to accommodate movement in both terrestrial and aquatic environments. Inspired by these biological features, we present PuffyBot, an untethered shape morphing robot capable of changing its body morphology to navigate multiple environments. Our robot design leverages a scissor-lift mechanism driven by a linear actuator as its primary structure to achieve shape morphing. The transformation enables a volume change from 255.00 cm3 to 423.75 cm3, modulating the buoyant force to counteract a downward force of 3.237 N due to 330 g mass of the robot. A bell-crank linkage is integrated with the scissor-lift mechanism, which adjusts the servo-actuated limbs by 90 degrees, allowing a seamless transition between crawling and swimming modes. The robot is fully waterproof, using thermoplastic polyurethane (TPU) fabric to ensure functionality in aquatic environments. The robot can operate untethered for two hours with an onboard battery of 1000 mA h. Our experimental results demonstrate multi-environment locomotion, including crawling on the land, crawling on the underwater floor, swimming on the water surface, and bimodal buoyancy adjustment to submerge underwater or resurface. These findings show the potential of shape morphing to create versatile and energy efficient robotic platforms suitable for diverse environments.
From Fold to Function: Dynamic Modeling and Simulation-Driven Design of Origami Mechanisms
Nov 13, 2025Origami-inspired mechanisms can transform flat sheets into functional three-dimensional dynamic structures that are lightweight, compact, and capable of complex motion. These properties make origami increasingly valuable in robotic and deployable systems. However, accurately simulating their folding behavior and interactions with the environment remains challenging. To address this, we present a design framework for origami mechanism simulation that utilizes MuJoCo's deformable-body capabilities. In our approach, origami sheets are represented as graphs of interconnected deformable elements with user-specified constraints such as creases and actuation, defined through an intuitive graphical user interface (GUI). This framework allows users to generate physically consistent simulations that capture both the geometric structure of origami mechanisms and their interactions with external objects and surfaces. We demonstrate our method's utility through a case study on an origami catapult, where design parameters are optimized in simulation using the Covariance Matrix Adaptation Evolution Strategy (CMA-ES) and validated experimentally on physical prototypes. The optimized structure achieves improved throwing performance, illustrating how our system enables rapid, simulation-driven origami design, optimization, and analysis.
Tilde: Teleoperation for Dexterous In-Hand Manipulation Learning with a DeltaHand
May 29, 2024Dexterous robotic manipulation remains a challenging domain due to its strict demands for precision and robustness on both hardware and software. While dexterous robotic hands have demonstrated remarkable capabilities in complex tasks, efficiently learning adaptive control policies for hands still presents a significant hurdle given the high dimensionalities of hands and tasks. To bridge this gap, we propose Tilde, an imitation learning-based in-hand manipulation system on a dexterous DeltaHand. It leverages 1) a low-cost, configurable, simple-to-control, soft dexterous robotic hand, DeltaHand, 2) a user-friendly, precise, real-time teleoperation interface, TeleHand, and 3) an efficient and generalizable imitation learning approach with diffusion policies. Our proposed TeleHand has a kinematic twin design to the DeltaHand that enables precise one-to-one joint control of the DeltaHand during teleoperation. This facilitates efficient high-quality data collection of human demonstrations in the real world. To evaluate the effectiveness of our system, we demonstrate the fully autonomous closed-loop deployment of diffusion policies learned from demonstrations across seven dexterous manipulation tasks with an average 90% success rate.
SkinGrip: An Adaptive Soft Robotic Manipulator with Capacitive Sensing for Whole-Limb Bathing Assistance
May 04, 2024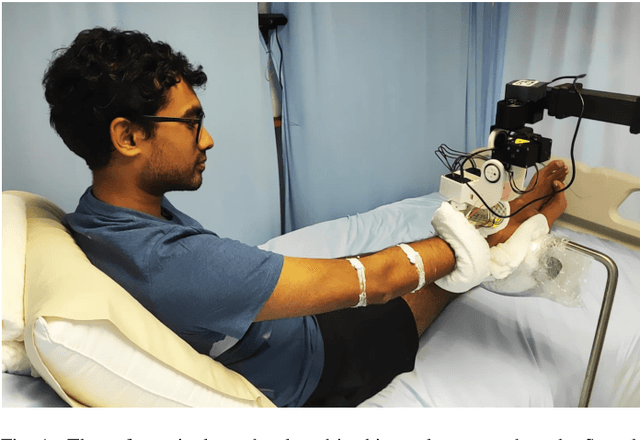

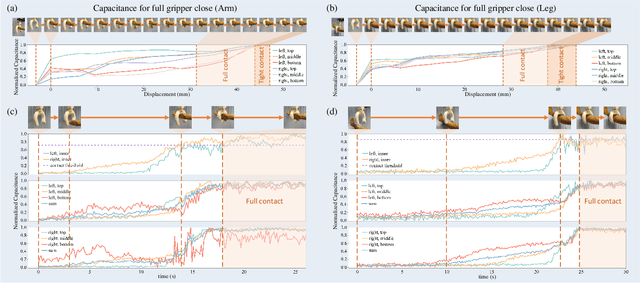

Robotics presents a promising opportunity for enhancing bathing assistance, potentially to alleviate labor shortages and reduce care costs, while offering consistent and gentle care for individuals with physical disabilities. However, ensuring flexible and efficient cleaning of the human body poses challenges as it involves direct physical contact between the human and the robot, and necessitates simple, safe, and effective control. In this paper, we introduce a soft, expandable robotic manipulator with embedded capacitive proximity sensing arrays, designed for safe and efficient bathing assistance. We conduct a thorough evaluation of our soft manipulator, comparing it with a baseline rigid end effector in a human study involving 12 participants across $96$ bathing trails. Our soft manipulator achieves an an average cleaning effectiveness of 88.8% on arms and 81.4% on legs, far exceeding the performance of the baseline. Participant feedback further validates the manipulator's ability to maintain safety, comfort, and thorough cleaning.
Enhancing Dexterity in Robotic Manipulation via Hierarchical Contact Exploration
Jul 01, 2023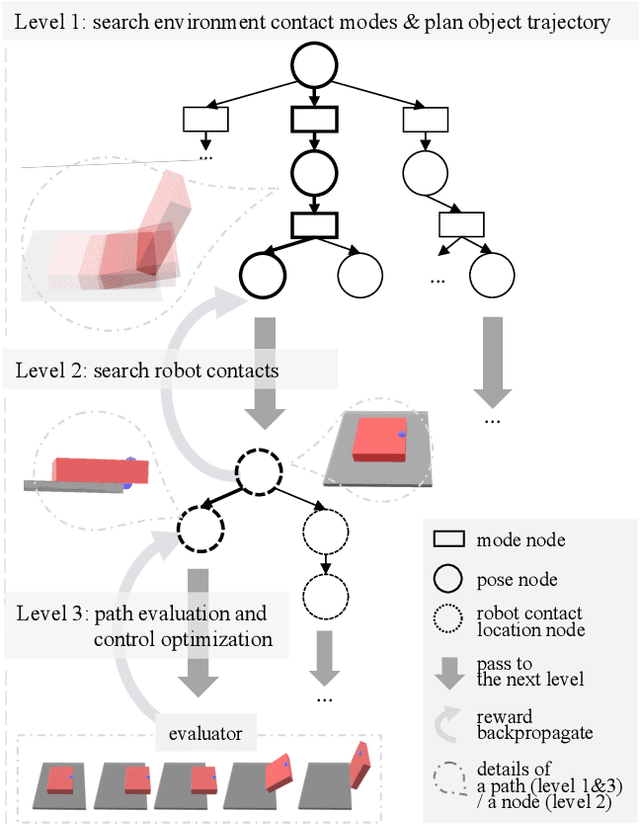
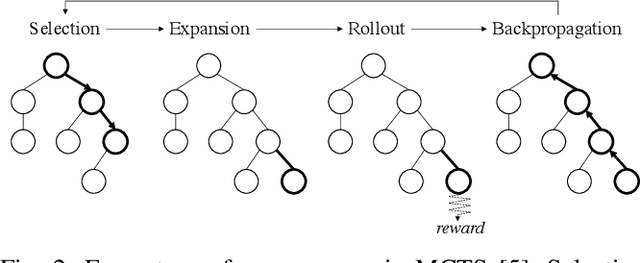
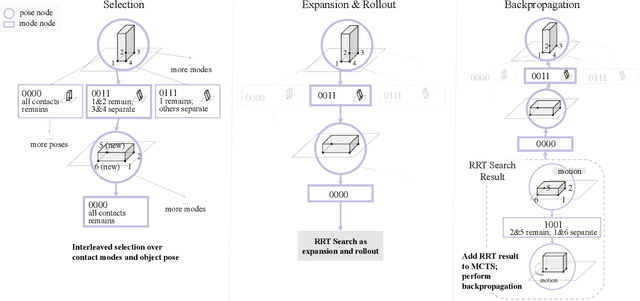
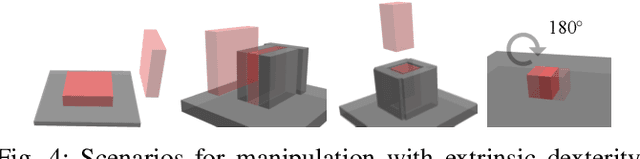
We present a hierarchical planning framework for dexterous robotic manipulation (HiDex). This framework exploits in-hand and extrinsic dexterity by actively exploring contacts. It generates rigid-body motions and complex contact sequences. Our framework is based on Monte-Carlo Tree Search (MCTS) and has three levels: 1) planning object motions and environment contact modes; 2) planning robot contacts; 3) path evaluation and control optimization that passes the rewards to the upper levels. This framework offers two main advantages. First, it allows efficient global reasoning over high-dimensional complex space created by contacts. It solves a diverse set of manipulation tasks that require dexterity, both intrinsic (using the fingers) and extrinsic (also using the environment), mostly in seconds. Second, our framework allows the incorporation of expert knowledge and customizable setups in task mechanics and models. It requires minor modifications to accommodate different scenarios and robots. Hence, it could provide a flexible and generalizable solution for various manipulation tasks. As examples, we analyze the results on 7 hand configurations and 15 scenarios. We demonstrate 8 of them on two robot platforms.
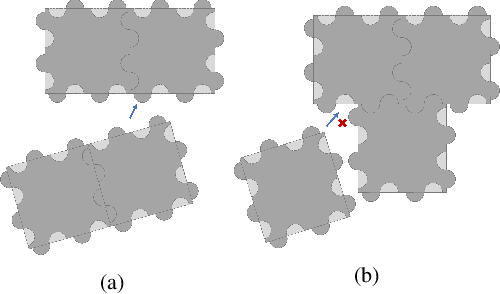
Reconfigurable Robot Control Using Flexible Coupling Mechanisms
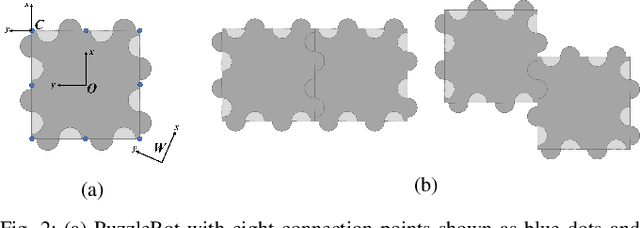
Jun 28, 2023Reconfigurable robot swarms are capable of connecting with each other to form complex structures. Current mechanical or magnetic connection mechanisms can be complicated to manufacture, consume high power, have a limited load-bearing capacity, or can only form rigid structures. In this paper, we present our low-cost soft anchor design that enables flexible coupling and decoupling between robots. Our asymmetric anchor requires minimal force to be pushed into the opening of another robot while having a strong pulling force so that the connection between robots can be secured. To maintain this flexible coupling mechanism as an assembled structure, we present our Model Predictive Control (MPC) frameworks with polygon constraints to model the geometric relationship between robots. We conducted experiments on the soft anchor to obtain its force profile, which informed the three-bar linkage model of the anchor in the simulations. We show that the proposed mechanism and MPC frameworks enable the robots to couple, decouple, and perform various behaviors in both the simulation environment and hardware platform. Our code is available at https://github.com/ZoomLabCMU/puzzlebot_anchor . Video is available at https://www.youtube.com/watch?v=R3gFplorCJg .
Learning to Singulate Layers of Cloth using Tactile Feedback
Jul 22, 2022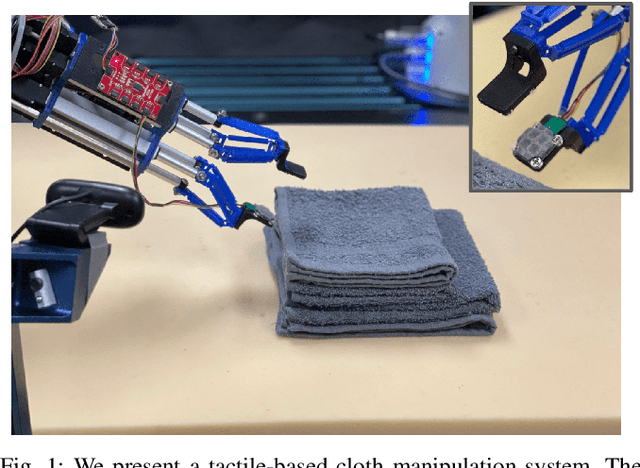
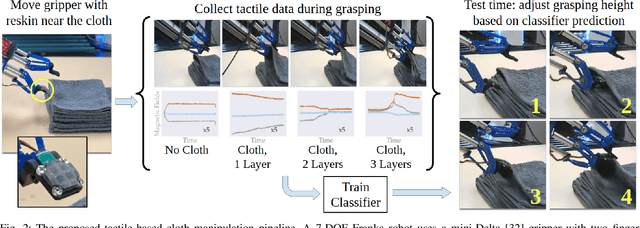
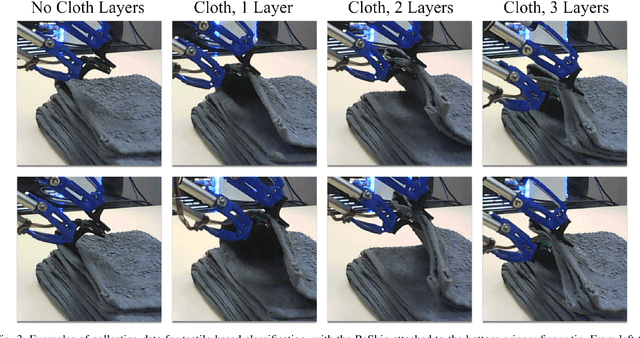
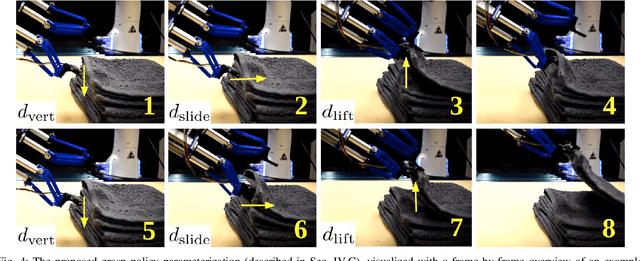
Robotic manipulation of cloth has applications ranging from fabrics manufacturing to handling blankets and laundry. Cloth manipulation is challenging for robots largely due to their high degrees of freedom, complex dynamics, and severe self-occlusions when in folded or crumpled configurations. Prior work on robotic manipulation of cloth relies primarily on vision sensors alone, which may pose challenges for fine-grained manipulation tasks such as grasping a desired number of cloth layers from a stack of cloth. In this paper, we propose to use tactile sensing for cloth manipulation; we attach a tactile sensor (ReSkin) to one of the two fingertips of a Franka robot and train a classifier to determine whether the robot is grasping a specific number of cloth layers. During test-time experiments, the robot uses this classifier as part of its policy to grasp one or two cloth layers using tactile feedback to determine suitable grasping points. Experimental results over 180 physical trials suggest that the proposed method outperforms baselines that do not use tactile feedback and has better generalization to unseen cloth compared to methods that use image classifiers. Code, data, and videos are available at https://sites.google.com/view/reskin-cloth.
Configuration Control for Physical Coupling of Heterogeneous Robot Swarms
Mar 01, 2022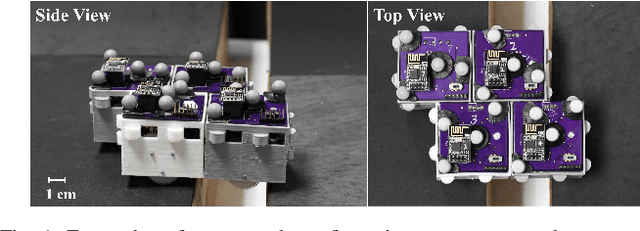
In this paper, we present a heterogeneous robot swarm system that can physically couple with each other to form functional structures and dynamically decouple to perform individual tasks. The connection between robots can be formed with a passive coupling mechanism, ensuring minimum energy consumption during coupling and decoupling behavior. The heterogeneity of the system enables the robots to perform structural enhancement configurations based on specific environmental requirements. We propose a connection-pair oriented configuration control algorithm to form different assemblies. We show experiments of up to nine robots performing the coupling, gap-crossing, and decoupling behaviors.
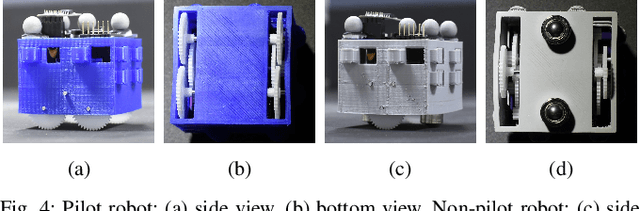
Characterization of a Meso-Scale Wearable Robot for Bathing Assistance
Feb 25, 2022
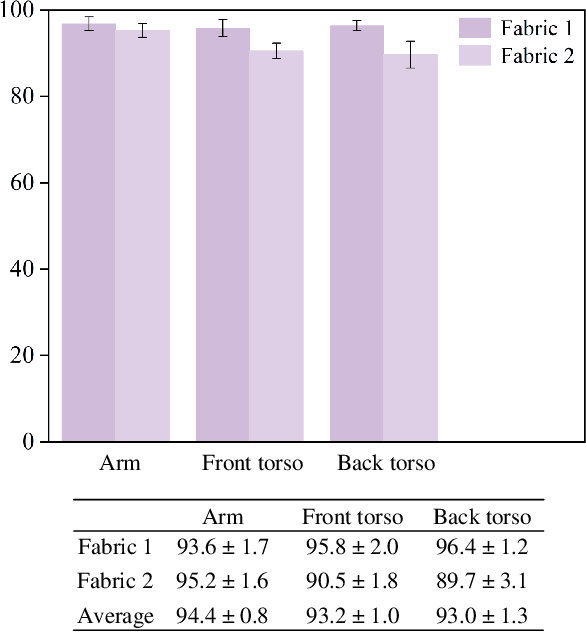
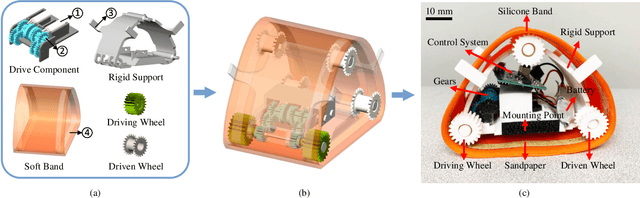
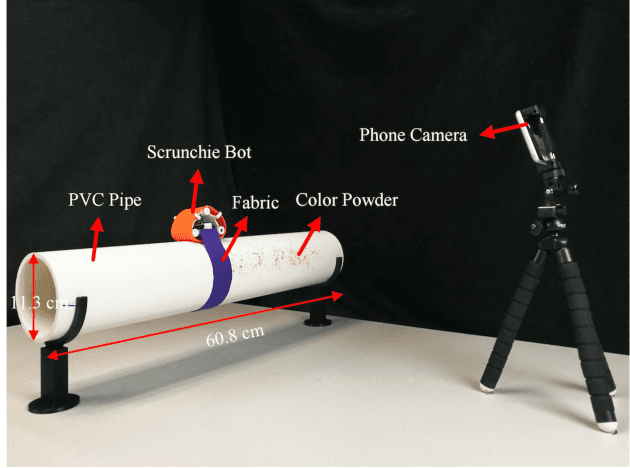
Robotic bathing assistance has long been considered an important and practical task in healthcare. Yet, achieving flexible and efficient cleaning tasks on the human body is challenging, since washing the body involves direct human-robot physical contact and simple, safe, and effective devices are needed for bathing and hygiene. In this paper, we present a meso-scale wearable robot that can locomote along the human body to provide bathing and skin care assistance. We evaluated the cleaning performance of the robot system under different scenarios. The experiments on the pipe show that the robot can achieve cleaning percentage over 92% with two types of stretchable fabrics. The robot removed most of the debris with average values of 94% on a human arm and 93% on a manikin torso. The results demonstrate that the robot exhibits high performance in cleaning tasks.