 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREFINE-DP: Diffusion Policy Fine-tuning for Humanoid Loco-manipulation via Reinforcement Learning
Mar 14, 2026Humanoid loco-manipulation requires coordinated high-level motion plans with stable, low-level whole-body execution under complex robot-environment dynamics and long-horizon tasks. While diffusion policies (DPs) show promise for learning from demonstrations, deploying them on humanoids poses critical challenges: the motion planner trained offline is decoupled from the low-level controller, leading to poor command tracking, compounding distribution shift, and task failures. The common approach of scaling demonstration data is prohibitively expensive for high-dimensional humanoid systems. To address this challenge, we present REFINE-DP (REinforcement learning FINE-tuning of Diffusion Policy), a hierarchical framework that jointly optimizes a DP high-level planner and an RL-based low-level loco-manipulation controller. The DP is fine-tuned via a PPO-based diffusion policy gradient to improve task success rate, while the controller is simultaneously updated to accurately track the planner's evolving command distribution, reducing the distributional mismatch that degrades motion quality. We validate REFINE-DP on a humanoid robot performing loco-manipulation tasks, including door traversal and long-horizon object transport. REFINE-DP achieves an over $90\%$ success rate in simulation, even in out-of-distribution cases not seen in the pre-trained data, and enables smooth autonomous task execution in real-world dynamic environments. Our proposed method substantially outperforms pre-trained DP baselines and demonstrates that RL fine-tuning is key to reliable humanoid loco-manipulation. https://refine-dp.github.io/REFINE-DP/
Opt2Skill: Imitating Dynamically-feasible Whole-Body Trajectories for Versatile Humanoid Loco-Manipulation
Sep 30, 2024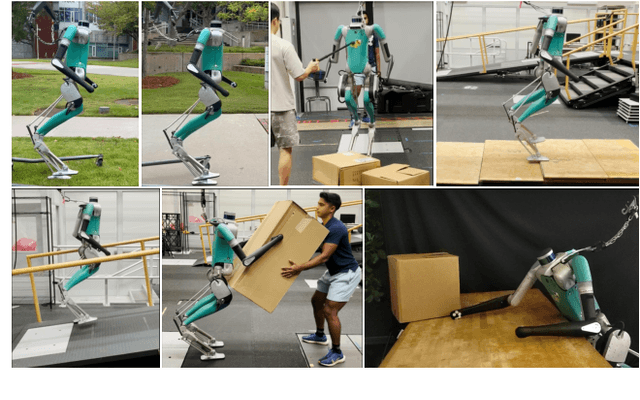
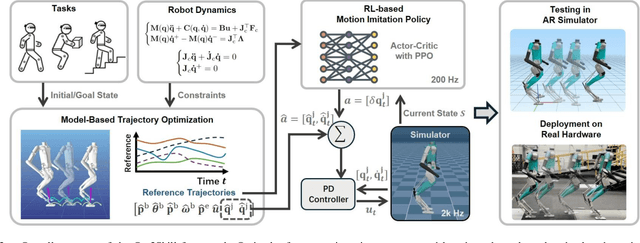
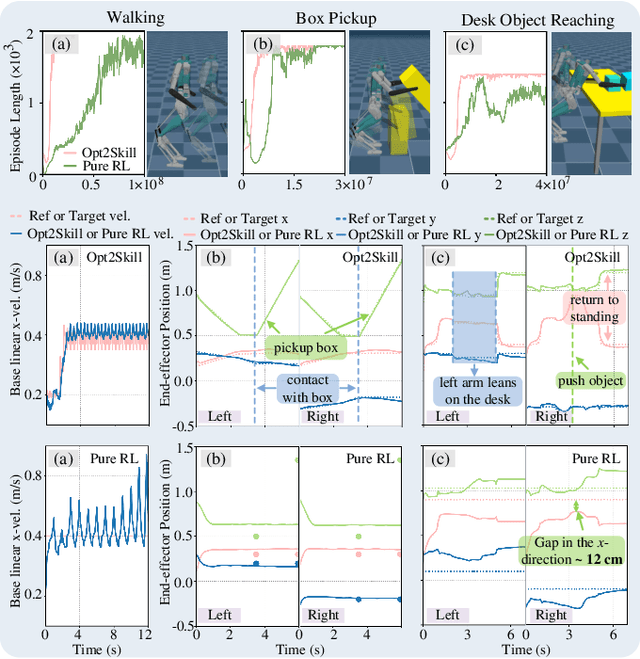
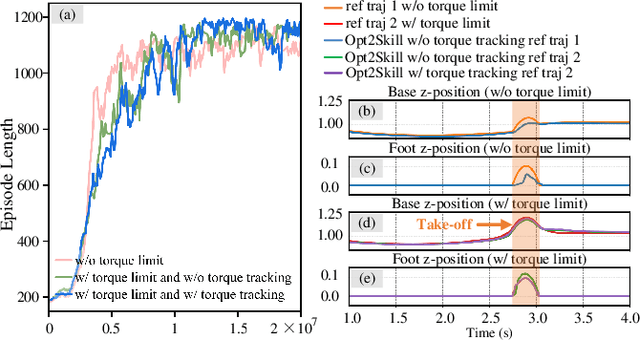
Humanoid robots are designed to perform diverse loco-manipulation tasks. However, they face challenges due to their high-dimensional and unstable dynamics, as well as the complex contact-rich nature of the tasks. Model-based optimal control methods offer precise and systematic control but are limited by high computational complexity and accurate contact sensing. On the other hand, reinforcement learning (RL) provides robustness and handles high-dimensional spaces but suffers from inefficient learning, unnatural motion, and sim-to-real gaps. To address these challenges, we introduce Opt2Skill, an end-to-end pipeline that combines model-based trajectory optimization with RL to achieve robust whole-body loco-manipulation. We generate reference motions for the Digit humanoid robot using differential dynamic programming (DDP) and train RL policies to track these trajectories. Our results demonstrate that Opt2Skill outperforms pure RL methods in both training efficiency and task performance, with optimal trajectories that account for torque limits enhancing trajectory tracking. We successfully transfer our approach to real-world applications.
SkinGrip: An Adaptive Soft Robotic Manipulator with Capacitive Sensing for Whole-Limb Bathing Assistance
May 04, 2024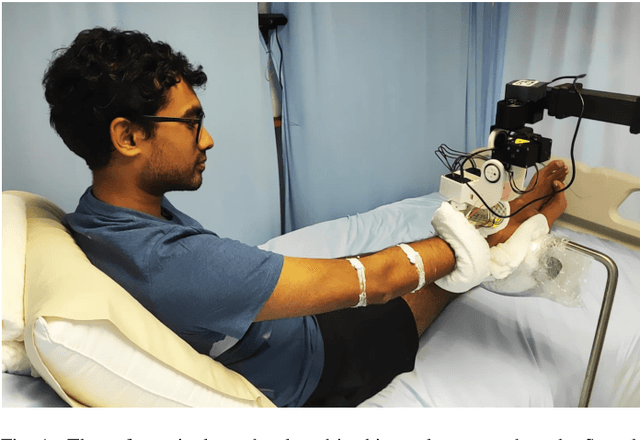

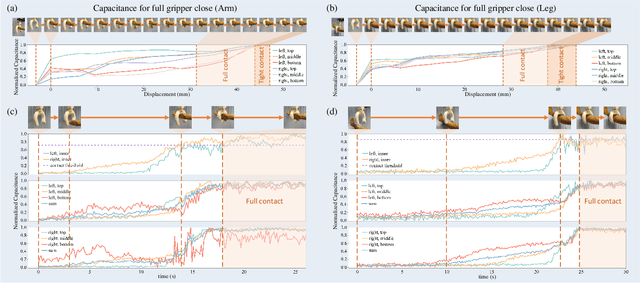

Robotics presents a promising opportunity for enhancing bathing assistance, potentially to alleviate labor shortages and reduce care costs, while offering consistent and gentle care for individuals with physical disabilities. However, ensuring flexible and efficient cleaning of the human body poses challenges as it involves direct physical contact between the human and the robot, and necessitates simple, safe, and effective control. In this paper, we introduce a soft, expandable robotic manipulator with embedded capacitive proximity sensing arrays, designed for safe and efficient bathing assistance. We conduct a thorough evaluation of our soft manipulator, comparing it with a baseline rigid end effector in a human study involving 12 participants across $96$ bathing trails. Our soft manipulator achieves an an average cleaning effectiveness of 88.8% on arms and 81.4% on legs, far exceeding the performance of the baseline. Participant feedback further validates the manipulator's ability to maintain safety, comfort, and thorough cleaning.
Hybrid Robotic Grasping with a Soft Multimodal Gripper and a Deep Multistage Learning Scheme
Feb 28, 2022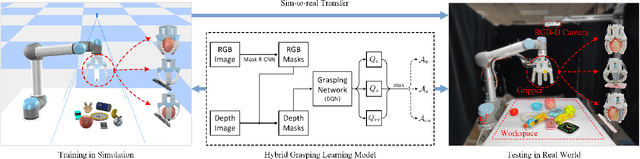
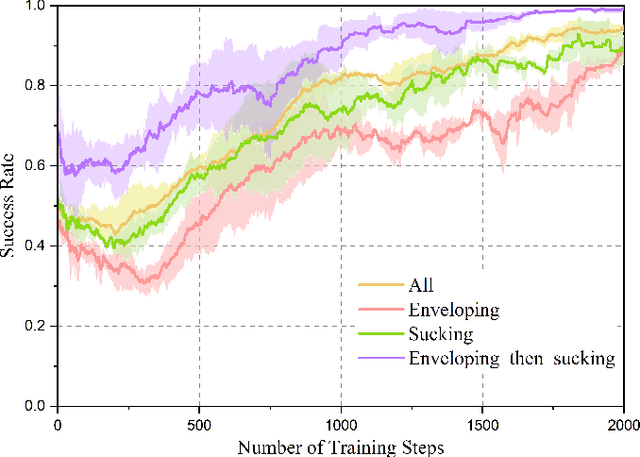
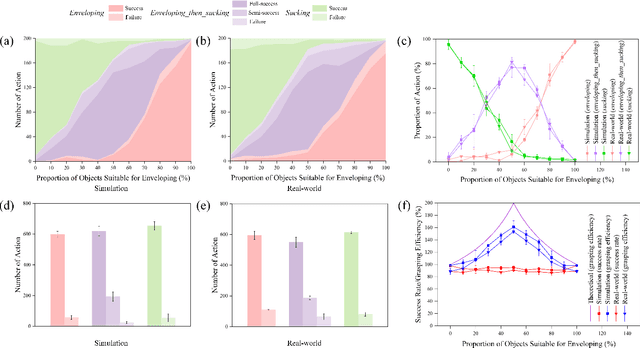
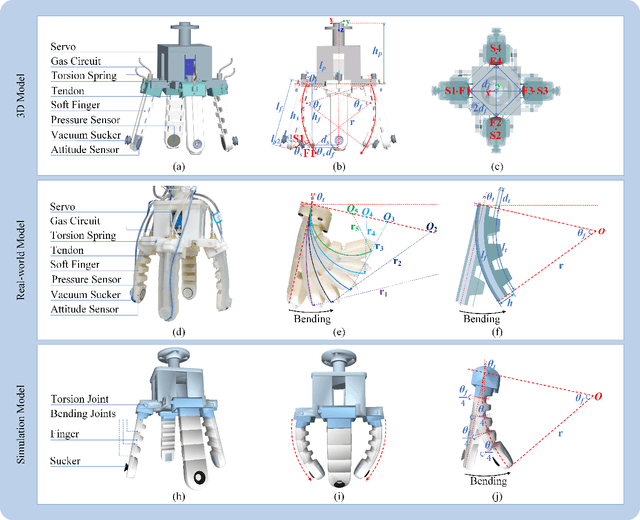
Grasping has long been considered an important and practical task in robotic manipulation. Yet achieving robust and efficient grasps of diverse objects is challenging, since it involves gripper design, perception, control and learning, etc. Recent learning-based approaches have shown excellent performance in grasping a variety of novel objects. However, these methods either are typically limited to one single grasping mode, or else more end effectors are needed to grasp various objects. In addition, gripper design and learning methods are commonly developed separately, which may not adequately explore the ability of a multimodal gripper. In this paper, we present a deep reinforcement learning (DRL) framework to achieve multistage hybrid robotic grasping with a new soft multimodal gripper. A soft gripper with three grasping modes (i.e., \textit{enveloping}, \textit{sucking}, and \textit{enveloping\_then\_sucking}) can both deal with objects of different shapes and grasp more than one object simultaneously. We propose a novel hybrid grasping method integrated with the multimodal gripper to optimize the number of grasping actions. We evaluate the DRL framework under different scenarios (i.e., with different ratios of objects of two grasp types). The proposed algorithm is shown to reduce the number of grasping actions (i.e., enlarge the grasping efficiency, with maximum values of 161\% in simulations and 154\% in real-world experiments) compared to single grasping modes.
Characterization of a Meso-Scale Wearable Robot for Bathing Assistance
Feb 25, 2022
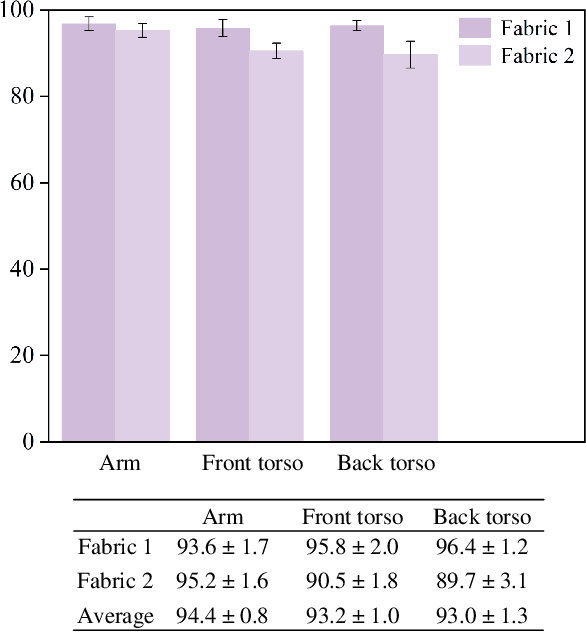
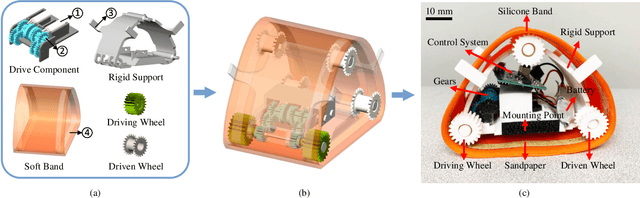
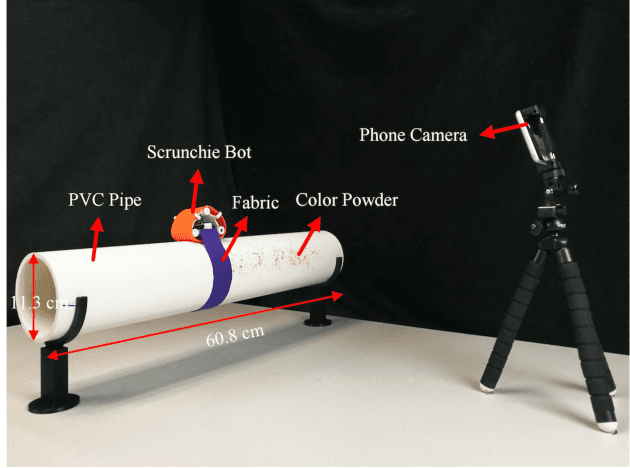
Robotic bathing assistance has long been considered an important and practical task in healthcare. Yet, achieving flexible and efficient cleaning tasks on the human body is challenging, since washing the body involves direct human-robot physical contact and simple, safe, and effective devices are needed for bathing and hygiene. In this paper, we present a meso-scale wearable robot that can locomote along the human body to provide bathing and skin care assistance. We evaluated the cleaning performance of the robot system under different scenarios. The experiments on the pipe show that the robot can achieve cleaning percentage over 92% with two types of stretchable fabrics. The robot removed most of the debris with average values of 94% on a human arm and 93% on a manikin torso. The results demonstrate that the robot exhibits high performance in cleaning tasks.