 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkinGrip: An Adaptive Soft Robotic Manipulator with Capacitive Sensing for Whole-Limb Bathing Assistance
Paper and Code
May 04, 2024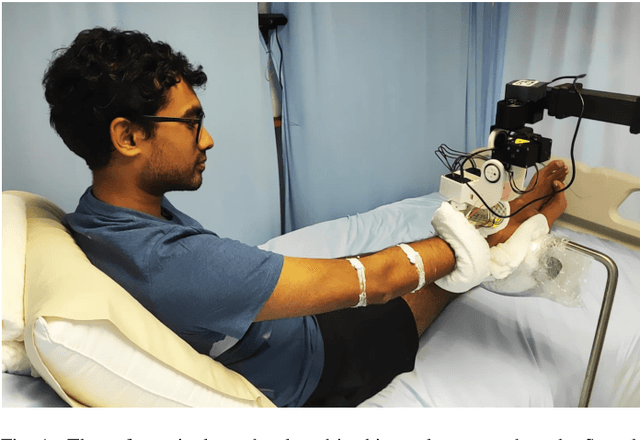

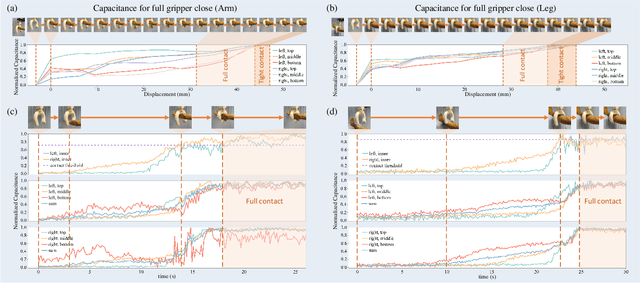

Robotics presents a promising opportunity for enhancing bathing assistance, potentially to alleviate labor shortages and reduce care costs, while offering consistent and gentle care for individuals with physical disabilities. However, ensuring flexible and efficient cleaning of the human body poses challenges as it involves direct physical contact between the human and the robot, and necessitates simple, safe, and effective control. In this paper, we introduce a soft, expandable robotic manipulator with embedded capacitive proximity sensing arrays, designed for safe and efficient bathing assistance. We conduct a thorough evaluation of our soft manipulator, comparing it with a baseline rigid end effector in a human study involving 12 participants across $96$ bathing trails. Our soft manipulator achieves an an average cleaning effectiveness of 88.8% on arms and 81.4% on legs, far exceeding the performance of the baseline. Participant feedback further validates the manipulator's ability to maintain safety, comfort, and thorough cleaning.