 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePuzzleBots: Physical Coupling of Robot Swarms
Paper and Code


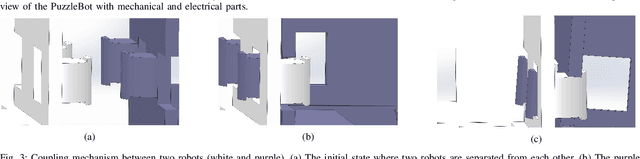
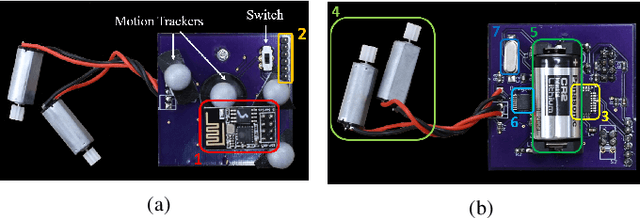
Robot swarms have been shown to improve the ability of individual robots by inter-robot collaboration. In this paper, we present the PuzzleBots - a low-cost robotic swarm system where robots can physically couple with each other to form functional structures with minimum energy consumption while maintaining individual mobility to navigate within the environment. Each robot has knobs and holes along the sides of its body so that the robots can couple by inserting the knobs into the holes. We present the characterization of knob design and the result of gap-crossing behavior with up to nine robots. We show with hardware experiments that the robots are able to couple with each other to cross gaps and decouple to perform individual tasks. We anticipate the PuzzleBots will be useful in unstructured environments as individuals and coupled systems in real-world applications.