 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOGPO: Sample Efficient Full-Finetuning of Generative Control Policies
May 04, 2026Generative control policies (GCPs), such as diffusion- and flow-based control policies, have emerged as effective parameterizations for robot learning. This work introduces Off-policy Generative Policy Optimization (OGPO), a sample-efficient algorithm for finetuning GCPs that maintains off-policy critic networks to maximize data reuse and propagate policy gradients through the full generative process of the policy via a modified PPO objective, using critics as the terminal reward. OGPO achieves state-of-the-art performance on manipulation tasks spanning multi-task settings, high-precision insertion, and dexterous control. To our knowledge, it is also the only method that can fine-tune poorly-initialized behavior cloning policies to near full task-success with no expert data in the online replay buffer, and does so with few task-specific hyperparameter tuning. Through extensive empirical investigations, we demonstrate the OGPO drastically outperforms methods alternatives on policy steering and learning residual corrections, and identify the key mechanisms behind its performance. We further introduce practical stabilizers, including success-buffer regularization, conservative advantages, $χ^2$ regularization, and Q-variance reduction, to mitigate critic over-exploitation across state- and pixel-based settings. Beyond proposing OGPO, we conduct a systematic empirical study of GCP finetuning, identifying the stabilizing mechanisms and failure modes that govern successful off-policy full-policy improvement.
From Fold to Function: Dynamic Modeling and Simulation-Driven Design of Origami Mechanisms
Nov 13, 2025Origami-inspired mechanisms can transform flat sheets into functional three-dimensional dynamic structures that are lightweight, compact, and capable of complex motion. These properties make origami increasingly valuable in robotic and deployable systems. However, accurately simulating their folding behavior and interactions with the environment remains challenging. To address this, we present a design framework for origami mechanism simulation that utilizes MuJoCo's deformable-body capabilities. In our approach, origami sheets are represented as graphs of interconnected deformable elements with user-specified constraints such as creases and actuation, defined through an intuitive graphical user interface (GUI). This framework allows users to generate physically consistent simulations that capture both the geometric structure of origami mechanisms and their interactions with external objects and surfaces. We demonstrate our method's utility through a case study on an origami catapult, where design parameters are optimized in simulation using the Covariance Matrix Adaptation Evolution Strategy (CMA-ES) and validated experimentally on physical prototypes. The optimized structure achieves improved throwing performance, illustrating how our system enables rapid, simulation-driven origami design, optimization, and analysis.
Inclusion in Assistive Haircare Robotics: Practical and Ethical Considerations in Hair Manipulation
Nov 07, 2024
Robot haircare systems could provide a controlled and personalized environment that is respectful of an individual's sensitivities and may offer a comfortable experience. We argue that because of hair and hairstyles' often unique importance in defining and expressing an individual's identity, we should approach the development of assistive robot haircare systems carefully while considering various practical and ethical concerns and risks. In this work, we specifically list and discuss the consideration of hair type, expression of the individual's preferred identity, cost accessibility of the system, culturally-aware robot strategies, and the associated societal risks. Finally, we discuss the planned studies that will allow us to better understand and address the concerns and considerations we outlined in this work through interactions with both haircare experts and end-users. Through these practical and ethical considerations, this work seeks to systematically organize and provide guidance for the development of inclusive and ethical robot haircare systems.
Enhancing Dexterity in Robotic Manipulation via Hierarchical Contact Exploration
Jul 01, 2023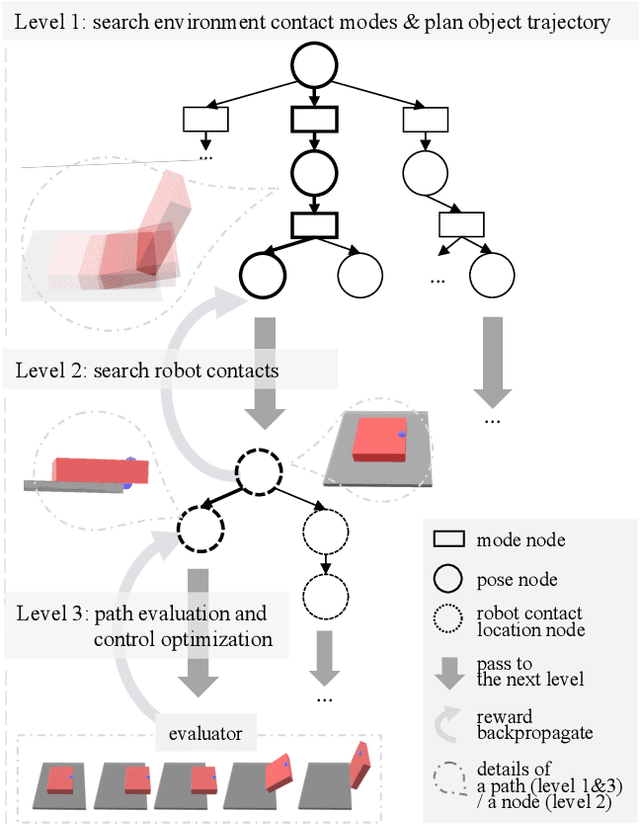
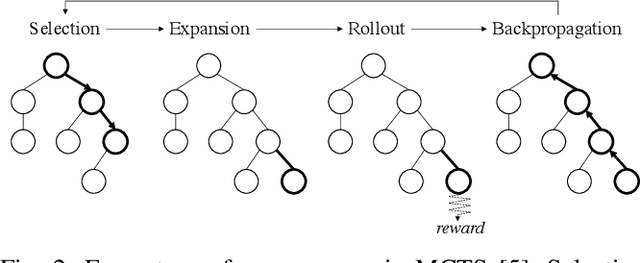
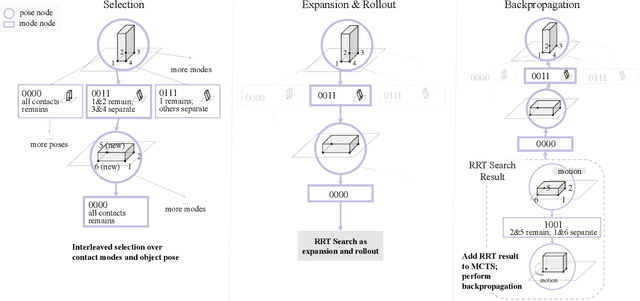
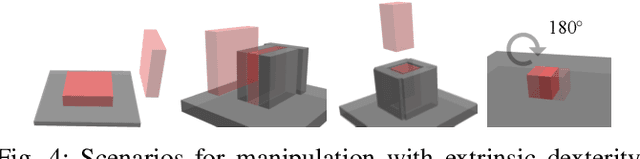
We present a hierarchical planning framework for dexterous robotic manipulation (HiDex). This framework exploits in-hand and extrinsic dexterity by actively exploring contacts. It generates rigid-body motions and complex contact sequences. Our framework is based on Monte-Carlo Tree Search (MCTS) and has three levels: 1) planning object motions and environment contact modes; 2) planning robot contacts; 3) path evaluation and control optimization that passes the rewards to the upper levels. This framework offers two main advantages. First, it allows efficient global reasoning over high-dimensional complex space created by contacts. It solves a diverse set of manipulation tasks that require dexterity, both intrinsic (using the fingers) and extrinsic (also using the environment), mostly in seconds. Second, our framework allows the incorporation of expert knowledge and customizable setups in task mechanics and models. It requires minor modifications to accommodate different scenarios and robots. Hence, it could provide a flexible and generalizable solution for various manipulation tasks. As examples, we analyze the results on 7 hand configurations and 15 scenarios. We demonstrate 8 of them on two robot platforms.
DeltaZ: An Accessible Compliant Delta Robot Manipulator for Research and Education
Jul 02, 2022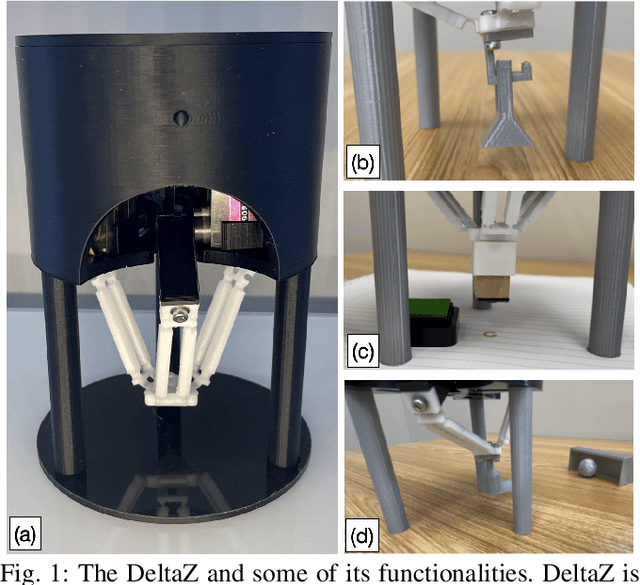


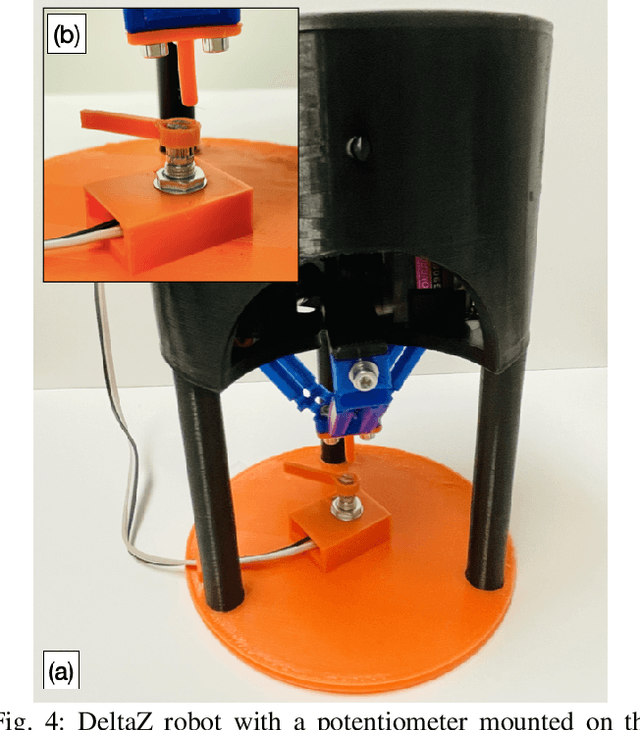
This paper presents the DeltaZ robot, a centimeter-scale, low-cost, delta-style robot that allows for a broad range of capabilities and robust functionalities. Current technologies allow DeltaZ to be 3D-printed from soft and rigid materials so that it is easy to assemble and maintain, and lowers the barriers to utilize. Functionality of the robot stems from its three translational degrees of freedom and a closed form kinematic solution which makes manipulation problems more intuitive compared to other manipulators. Moreover, the low cost of the robot presents an opportunity to democratize manipulators for a research setting. We also describe how the robot can be used as a reinforcement learning benchmark. Open-source 3D-printable designs and code are available to the public.
Linear Delta Arrays for Dexterous Distributed Manipulation
Jun 09, 2022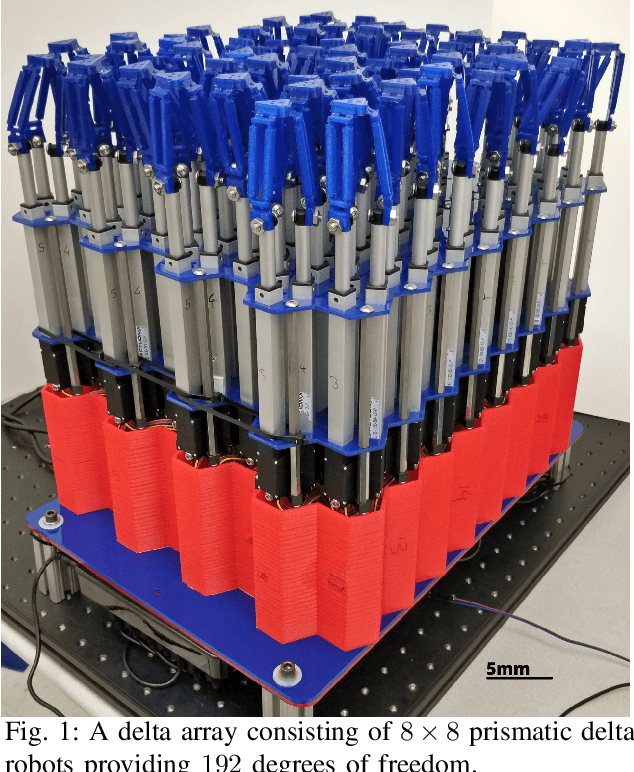



This paper presents a new type of distributed dexterous manipulators: delta arrays. Each delta array consists of a grid of linearly-actuated delta robots with compliant 3D-printed parallelogram links. These arrays can be used to perform planar transportation tasks, similar to smart conveyors. However, the deltas' additional degrees of freedom also afford a wide range of out-of-plane manipulations, as well as prehensile manipulations between sets of deltas. A delta array thus affords a wide range of distributed manipulation strategies. In this paper, we present the design of the delta arrays, including the individual deltas, a modular array structure, and distributed communication and control. We also construct and evaluate an 8x8 array using the proposed design. Our evaluations show that the resulting 192 DoF robot is capable of performing various coordinated distributed manipulations of a variety of objects, including translation, alignment, and prehensile squeezing.
Multi-Modal Super Resolution for Dense Microscopic Particle Size Estimation
Oct 19, 2020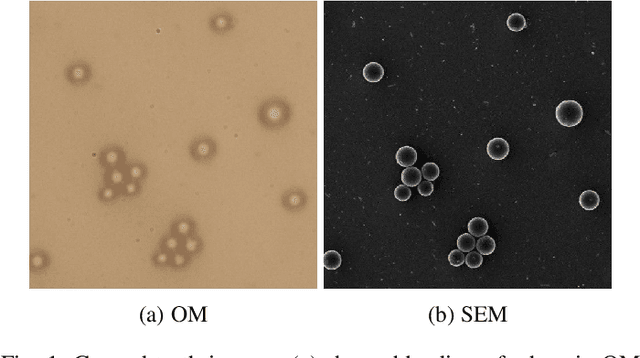
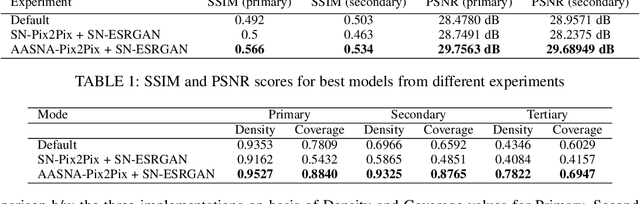

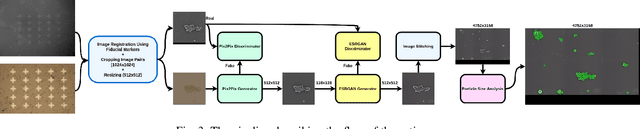
Particle Size Analysis (PSA) is an important process carried out in a number of industries, which can significantly influence the properties of the final product. A ubiquitous instrument for this purpose is the Optical Microscope (OM). However, OMs are often prone to drawbacks like low resolution, small focal depth, and edge features being masked due to diffraction. We propose a powerful application of a combination of two Conditional Generative Adversarial Networks (cGANs) that Super Resolve OM images to look like Scanning Electron Microscope (SEM) images. We further demonstrate the use of a custom object detection module that can perform efficient PSA of the super-resolved particles on both, densely and sparsely packed images. The PSA results obtained from the super-resolved images have been benchmarked against human annotators, and results obtained from the corresponding SEM images. The proposed models show a generalizable way of multi-modal image translation and super-resolution for accurate particle size estimation.
Deep Learning Based Natural Language Processing for End to End Speech Translation
Aug 09, 2018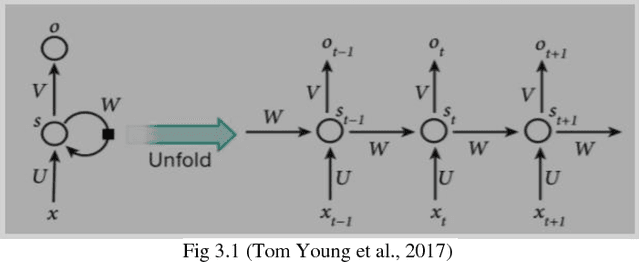
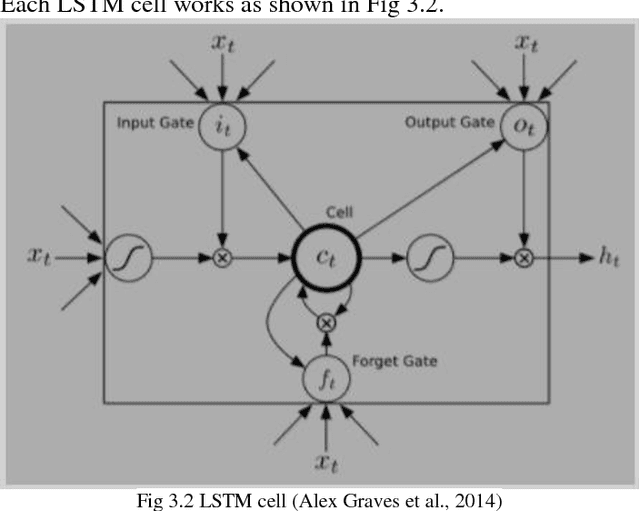
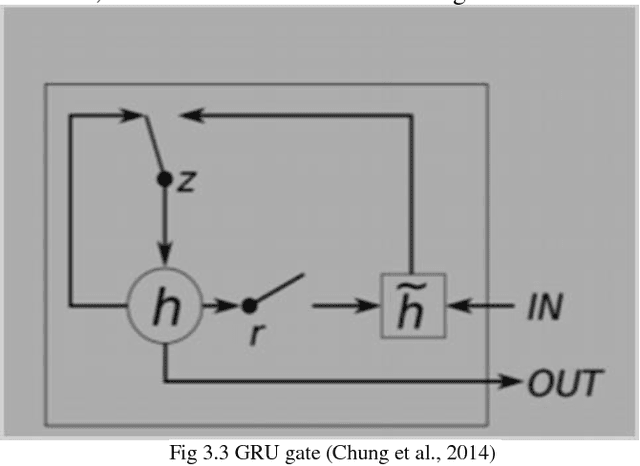
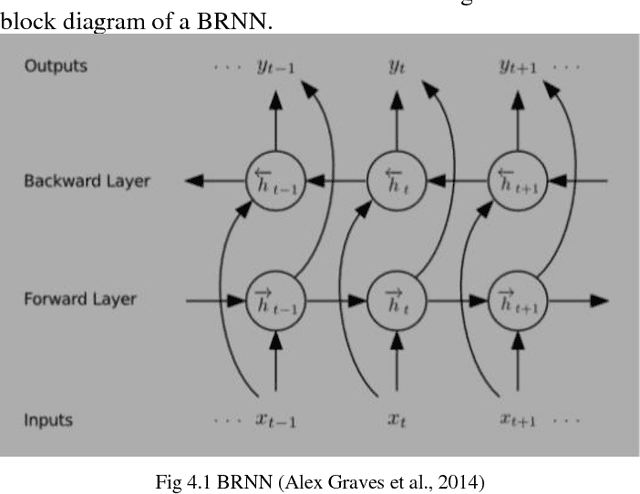
Deep Learning methods employ multiple processing layers to learn hierarchial representations of data. They have already been deployed in a humongous number of applications and have produced state-of-the-art results. Recently with the growth in processing power of computers to be able to do high dimensional tensor calculations, Natural Language Processing (NLP) applications have been given a significant boost in terms of efficiency as well as accuracy. In this paper, we will take a look at various signal processing techniques and then application of them to produce a speech-to-text system using Deep Recurrent Neural Networks.