 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactAlign: Human-to-Robot Policy Transfer via Tactile Alignment
Feb 14, 2026Human demonstrations collected by wearable devices (e.g., tactile gloves) provide fast and dexterous supervision for policy learning, and are guided by rich, natural tactile feedback. However, a key challenge is how to transfer human-collected tactile signals to robots despite the differences in sensing modalities and embodiment. Existing human-to-robot (H2R) approaches that incorporate touch often assume identical tactile sensors, require paired data, and involve little to no embodiment gap between human demonstrator and the robots, limiting scalability and generality. We propose TactAlign, a cross-embodiment tactile alignment method that transfers human-collected tactile signals to a robot with different embodiment. TactAlign transforms human and robot tactile observations into a shared latent representation using a rectified flow, without paired datasets, manual labels, or privileged information. Our method enables low-cost latent transport guided by hand-object interaction-derived pseudo-pairs. We demonstrate that TactAlign improves H2R policy transfer across multiple contact-rich tasks (pivoting, insertion, lid closing), generalizes to unseen objects and tasks with human data (less than 5 minutes), and enables zero-shot H2R transfer on a highly dexterous tasks (light bulb screwing).
Benchmarking Affordance Generalization with BusyBox
Feb 05, 2026Vision-Language-Action (VLA) models have been attracting the attention of researchers and practitioners thanks to their promise of generalization. Although single-task policies still offer competitive performance, VLAs are increasingly able to handle commands and environments unseen in their training set. While generalization in vision and language space is undoubtedly important for robust versatile behaviors, a key meta-skill VLAs need to possess is affordance generalization -- the ability to manipulate new objects with familiar physical features. In this work, we present BusyBox, a physical benchmark for systematic semi-automatic evaluation of VLAs' affordance generalization. BusyBox consists of 6 modules with switches, sliders, wires, buttons, a display, and a dial. The modules can be swapped and rotated to create a multitude of BusyBox variations with different visual appearances but the same set of affordances. We empirically demonstrate that generalization across BusyBox variants is highly challenging even for strong open-weights VLAs such as $π_{0.5}$ and GR00T-N1.6. To encourage the research community to evaluate their own VLAs on BusyBox and to propose new affordance generalization experiments, we have designed BusyBox to be easy to build in most robotics labs. We release the full set of CAD files for 3D-printing its parts as well as a bill of materials for (optionally) assembling its electronics. We also publish a dataset of language-annotated demonstrations that we collected using the common bimanual Mobile Aloha robot on the canonical BusyBox configuration. All of the released materials are available at https://microsoft.github.io/BusyBox.
OSMO: Open-Source Tactile Glove for Human-to-Robot Skill Transfer
Dec 09, 2025Human video demonstrations provide abundant training data for learning robot policies, but video alone cannot capture the rich contact signals critical for mastering manipulation. We introduce OSMO, an open-source wearable tactile glove designed for human-to-robot skill transfer. The glove features 12 three-axis tactile sensors across the fingertips and palm and is designed to be compatible with state-of-the-art hand-tracking methods for in-the-wild data collection. We demonstrate that a robot policy trained exclusively on human demonstrations collected with OSMO, without any real robot data, is capable of executing a challenging contact-rich manipulation task. By equipping both the human and the robot with the same glove, OSMO minimizes the visual and tactile embodiment gap, enabling the transfer of continuous shear and normal force feedback while avoiding the need for image inpainting or other vision-based force inference. On a real-world wiping task requiring sustained contact pressure, our tactile-aware policy achieves a 72% success rate, outperforming vision-only baselines by eliminating contact-related failure modes. We release complete hardware designs, firmware, and assembly instructions to support community adoption.
Self-supervised perception for tactile skin covered dexterous hands
May 16, 2025We present Sparsh-skin, a pre-trained encoder for magnetic skin sensors distributed across the fingertips, phalanges, and palm of a dexterous robot hand. Magnetic tactile skins offer a flexible form factor for hand-wide coverage with fast response times, in contrast to vision-based tactile sensors that are restricted to the fingertips and limited by bandwidth. Full hand tactile perception is crucial for robot dexterity. However, a lack of general-purpose models, challenges with interpreting magnetic flux and calibration have limited the adoption of these sensors. Sparsh-skin, given a history of kinematic and tactile sensing across a hand, outputs a latent tactile embedding that can be used in any downstream task. The encoder is self-supervised via self-distillation on a variety of unlabeled hand-object interactions using an Allegro hand sensorized with Xela uSkin. In experiments across several benchmark tasks, from state estimation to policy learning, we find that pretrained Sparsh-skin representations are both sample efficient in learning downstream tasks and improve task performance by over 41% compared to prior work and over 56% compared to end-to-end learning.
AnySkin: Plug-and-play Skin Sensing for Robotic Touch
Sep 12, 2024While tactile sensing is widely accepted as an important and useful sensing modality, its use pales in comparison to other sensory modalities like vision and proprioception. AnySkin addresses the critical challenges that impede the use of tactile sensing -- versatility, replaceability, and data reusability. Building on the simplistic design of ReSkin, and decoupling the sensing electronics from the sensing interface, AnySkin simplifies integration making it as straightforward as putting on a phone case and connecting a charger. Furthermore, AnySkin is the first uncalibrated tactile-sensor with cross-instance generalizability of learned manipulation policies. To summarize, this work makes three key contributions: first, we introduce a streamlined fabrication process and a design tool for creating an adhesive-free, durable and easily replaceable magnetic tactile sensor; second, we characterize slip detection and policy learning with the AnySkin sensor; and third, we demonstrate zero-shot generalization of models trained on one instance of AnySkin to new instances, and compare it with popular existing tactile solutions like DIGIT and ReSkin.https://any-skin.github.io/
Learning In-Hand Translation Using Tactile Skin With Shear and Normal Force Sensing
Jul 10, 2024Recent progress in reinforcement learning (RL) and tactile sensing has significantly advanced dexterous manipulation. However, these methods often utilize simplified tactile signals due to the gap between tactile simulation and the real world. We introduce a sensor model for tactile skin that enables zero-shot sim-to-real transfer of ternary shear and binary normal forces. Using this model, we develop an RL policy that leverages sliding contact for dexterous in-hand translation. We conduct extensive real-world experiments to assess how tactile sensing facilitates policy adaptation to various unseen object properties and robot hand orientations. We demonstrate that our 3-axis tactile policies consistently outperform baselines that use only shear forces, only normal forces, or only proprioception. Website: https://jessicayin.github.io/tactile-skin-rl/
Hearing Touch: Audio-Visual Pretraining for Contact-Rich Manipulation
May 14, 2024



Although pre-training on a large amount of data is beneficial for robot learning, current paradigms only perform large-scale pretraining for visual representations, whereas representations for other modalities are trained from scratch. In contrast to the abundance of visual data, it is unclear what relevant internet-scale data may be used for pretraining other modalities such as tactile sensing. Such pretraining becomes increasingly crucial in the low-data regimes common in robotics applications. In this paper, we address this gap by using contact microphones as an alternative tactile sensor. Our key insight is that contact microphones capture inherently audio-based information, allowing us to leverage large-scale audio-visual pretraining to obtain representations that boost the performance of robotic manipulation. To the best of our knowledge, our method is the first approach leveraging large-scale multisensory pre-training for robotic manipulation. For supplementary information including videos of real robot experiments, please see https://sites.google.com/view/hearing-touch.
Hierarchical State Space Models for Continuous Sequence-to-Sequence Modeling
Feb 15, 2024Reasoning from sequences of raw sensory data is a ubiquitous problem across fields ranging from medical devices to robotics. These problems often involve using long sequences of raw sensor data (e.g. magnetometers, piezoresistors) to predict sequences of desirable physical quantities (e.g. force, inertial measurements). While classical approaches are powerful for locally-linear prediction problems, they often fall short when using real-world sensors. These sensors are typically non-linear, are affected by extraneous variables (e.g. vibration), and exhibit data-dependent drift. For many problems, the prediction task is exacerbated by small labeled datasets since obtaining ground-truth labels requires expensive equipment. In this work, we present Hierarchical State-Space Models (HiSS), a conceptually simple, new technique for continuous sequential prediction. HiSS stacks structured state-space models on top of each other to create a temporal hierarchy. Across six real-world sensor datasets, from tactile-based state prediction to accelerometer-based inertial measurement, HiSS outperforms state-of-the-art sequence models such as causal Transformers, LSTMs, S4, and Mamba by at least 23% on MSE. Our experiments further indicate that HiSS demonstrates efficient scaling to smaller datasets and is compatible with existing data-filtering techniques. Code, datasets and videos can be found on https://hiss-csp.github.io.
All the Feels: A dexterous hand with large area sensing
Oct 27, 2022



High cost and lack of reliability has precluded the widespread adoption of dexterous hands in robotics. Furthermore, the lack of a viable tactile sensor capable of sensing over the entire area of the hand impedes the rich, low-level feedback that would improve learning of dexterous manipulation skills. This paper introduces an inexpensive, modular, robust, and scalable platform - the DManus- aimed at resolving these challenges while satisfying the large-scale data collection capabilities demanded by deep robot learning paradigms. Studies on human manipulation point to the criticality of low-level tactile feedback in performing everyday dexterous tasks. The DManus comes with ReSkin sensing on the entire surface of the palm as well as the fingertips. We demonstrate effectiveness of the fully integrated system in a tactile aware task - bin picking and sorting. Code, documentation, design files, detailed assembly instructions, trained models, task videos, and all supplementary materials required to recreate the setup can be found on http://roboticsbenchmarks.org/platforms/dmanus
Linear Delta Arrays for Dexterous Distributed Manipulation
Jun 09, 2022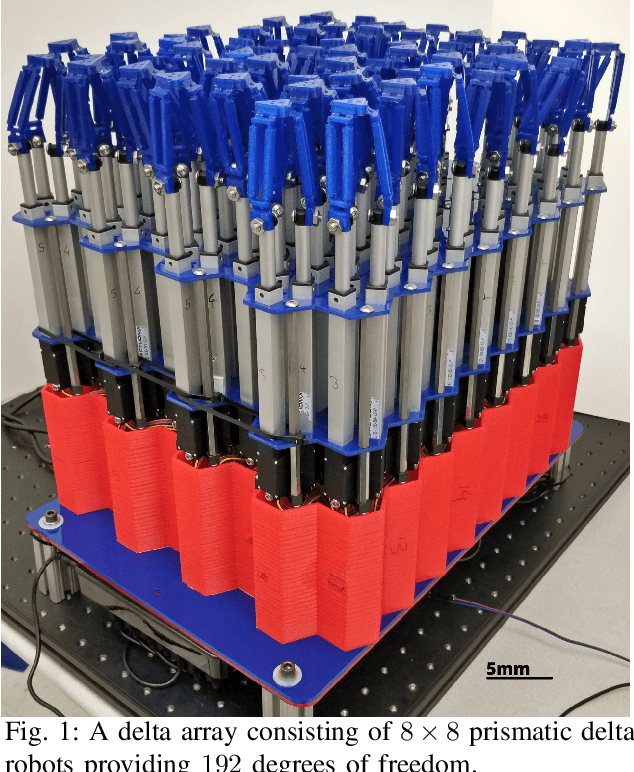



This paper presents a new type of distributed dexterous manipulators: delta arrays. Each delta array consists of a grid of linearly-actuated delta robots with compliant 3D-printed parallelogram links. These arrays can be used to perform planar transportation tasks, similar to smart conveyors. However, the deltas' additional degrees of freedom also afford a wide range of out-of-plane manipulations, as well as prehensile manipulations between sets of deltas. A delta array thus affords a wide range of distributed manipulation strategies. In this paper, we present the design of the delta arrays, including the individual deltas, a modular array structure, and distributed communication and control. We also construct and evaluate an 8x8 array using the proposed design. Our evaluations show that the resulting 192 DoF robot is capable of performing various coordinated distributed manipulations of a variety of objects, including translation, alignment, and prehensile squeezing.