 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPIDER: Scalable Physics-Informed Dexterous Retargeting
Nov 12, 2025Learning dexterous and agile policy for humanoid and dexterous hand control requires large-scale demonstrations, but collecting robot-specific data is prohibitively expensive. In contrast, abundant human motion data is readily available from motion capture, videos, and virtual reality, which could help address the data scarcity problem. However, due to the embodiment gap and missing dynamic information like force and torque, these demonstrations cannot be directly executed on robots. To bridge this gap, we propose Scalable Physics-Informed DExterous Retargeting (SPIDER), a physics-based retargeting framework to transform and augment kinematic-only human demonstrations to dynamically feasible robot trajectories at scale. Our key insight is that human demonstrations should provide global task structure and objective, while large-scale physics-based sampling with curriculum-style virtual contact guidance should refine trajectories to ensure dynamical feasibility and correct contact sequences. SPIDER scales across diverse 9 humanoid/dexterous hand embodiments and 6 datasets, improving success rates by 18% compared to standard sampling, while being 10X faster than reinforcement learning (RL) baselines, and enabling the generation of a 2.4M frames dynamic-feasible robot dataset for policy learning. As a universal physics-based retargeting method, SPIDER can work with diverse quality data and generate diverse and high-quality data to enable efficient policy learning with methods like RL.
Tactile Beyond Pixels: Multisensory Touch Representations for Robot Manipulation
Jun 17, 2025We present Sparsh-X, the first multisensory touch representations across four tactile modalities: image, audio, motion, and pressure. Trained on ~1M contact-rich interactions collected with the Digit 360 sensor, Sparsh-X captures complementary touch signals at diverse temporal and spatial scales. By leveraging self-supervised learning, Sparsh-X fuses these modalities into a unified representation that captures physical properties useful for robot manipulation tasks. We study how to effectively integrate real-world touch representations for both imitation learning and tactile adaptation of sim-trained policies, showing that Sparsh-X boosts policy success rates by 63% over an end-to-end model using tactile images and improves robustness by 90% in recovering object states from touch. Finally, we benchmark Sparsh-X ability to make inferences about physical properties, such as object-action identification, material-quantity estimation, and force estimation. Sparsh-X improves accuracy in characterizing physical properties by 48% compared to end-to-end approaches, demonstrating the advantages of multisensory pretraining for capturing features essential for dexterous manipulation.
Self-supervised perception for tactile skin covered dexterous hands
May 16, 2025We present Sparsh-skin, a pre-trained encoder for magnetic skin sensors distributed across the fingertips, phalanges, and palm of a dexterous robot hand. Magnetic tactile skins offer a flexible form factor for hand-wide coverage with fast response times, in contrast to vision-based tactile sensors that are restricted to the fingertips and limited by bandwidth. Full hand tactile perception is crucial for robot dexterity. However, a lack of general-purpose models, challenges with interpreting magnetic flux and calibration have limited the adoption of these sensors. Sparsh-skin, given a history of kinematic and tactile sensing across a hand, outputs a latent tactile embedding that can be used in any downstream task. The encoder is self-supervised via self-distillation on a variety of unlabeled hand-object interactions using an Allegro hand sensorized with Xela uSkin. In experiments across several benchmark tasks, from state estimation to policy learning, we find that pretrained Sparsh-skin representations are both sample efficient in learning downstream tasks and improve task performance by over 41% compared to prior work and over 56% compared to end-to-end learning.
Tactile Grasp Refinement using Deep Reinforcement Learning and Analytic Grasp Stability Metrics
Sep 23, 2021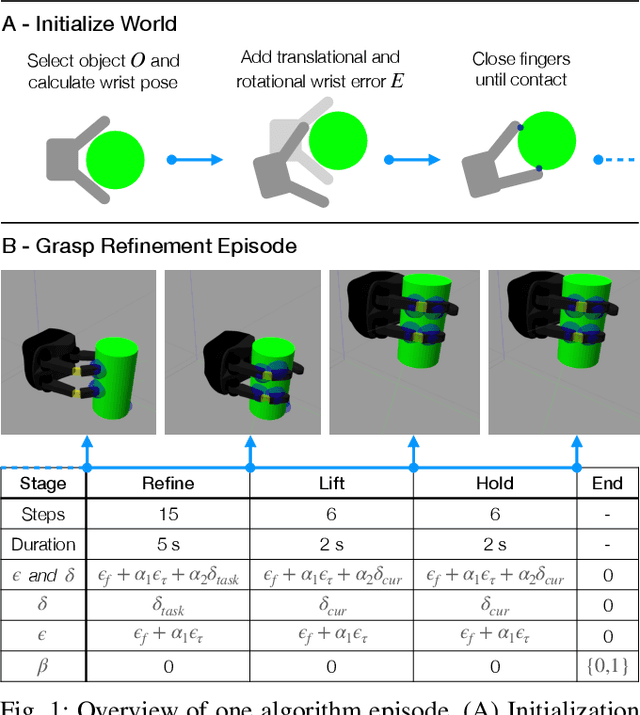
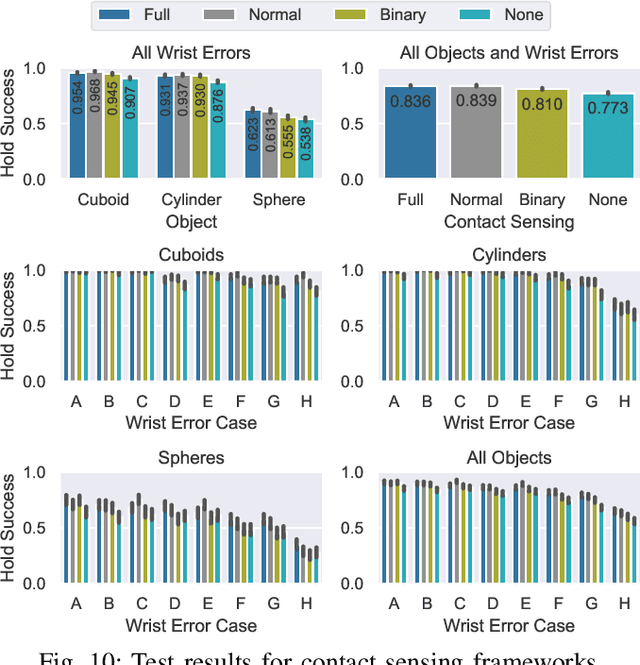
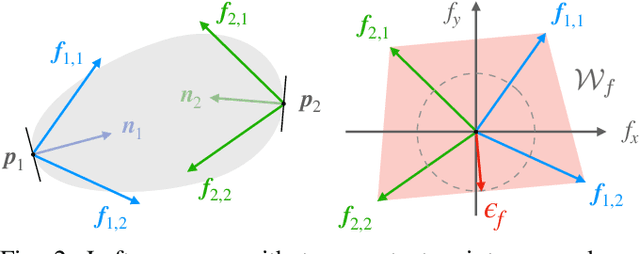
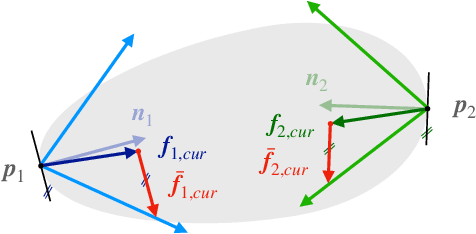
Reward functions are at the heart of every reinforcement learning (RL) algorithm. In robotic grasping, rewards are often complex and manually engineered functions that do not rely on well-justified physical models from grasp analysis. This work demonstrates that analytic grasp stability metrics constitute powerful optimization objectives for RL algorithms that refine grasps on a three-fingered hand using only tactile and joint position information. We outperform a binary-reward baseline by 42.9% and find that a combination of geometric and force-agnostic grasp stability metrics yields the highest average success rates of 95.4% for cuboids, 93.1% for cylinders, and 62.3% for spheres across wrist position errors between 0 and 7 centimeters and rotational errors between 0 and 14 degrees. In a second experiment, we show that grasp refinement algorithms trained with contact feedback (contact positions, normals, and forces) perform up to 6.6% better than a baseline that receives no tactile information.
Plot-guided Adversarial Example Construction for Evaluating Open-domain Story Generation
Apr 12, 2021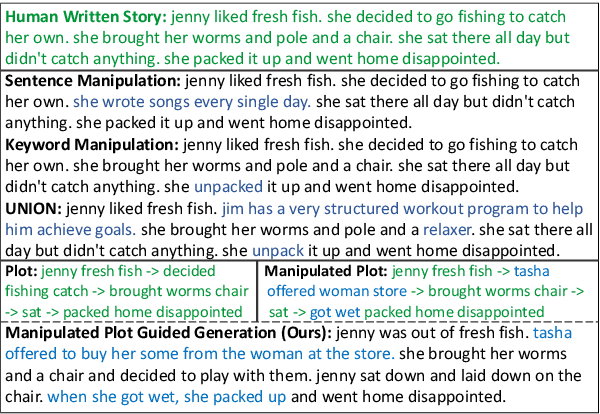
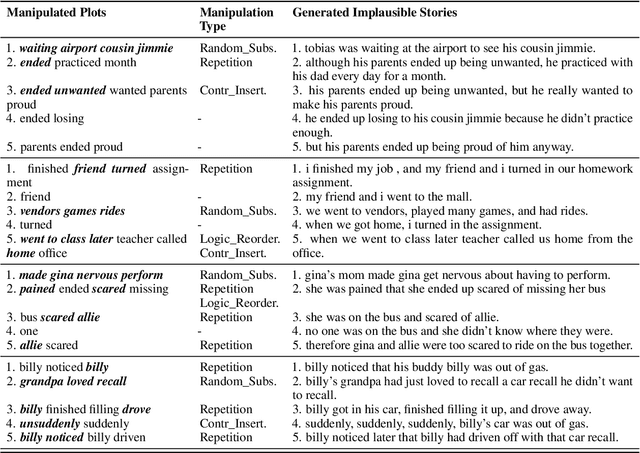
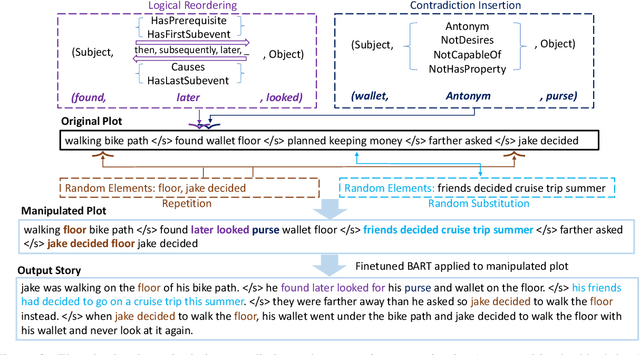
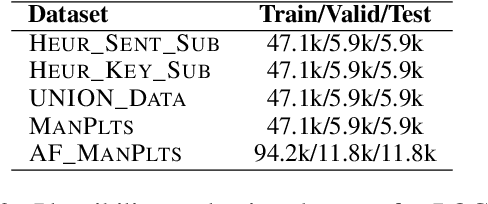
With the recent advances of open-domain story generation, the lack of reliable automatic evaluation metrics becomes an increasingly imperative issue that hinders the fast development of story generation. According to conducted researches in this regard, learnable evaluation metrics have promised more accurate assessments by having higher correlations with human judgments. A critical bottleneck of obtaining a reliable learnable evaluation metric is the lack of high-quality training data for classifiers to efficiently distinguish plausible and implausible machine-generated stories. Previous works relied on \textit{heuristically manipulated} plausible examples to mimic possible system drawbacks such as repetition, contradiction, or irrelevant content in the text level, which can be \textit{unnatural} and \textit{oversimplify} the characteristics of implausible machine-generated stories. We propose to tackle these issues by generating a more comprehensive set of implausible stories using {\em plots}, which are structured representations of controllable factors used to generate stories. Since these plots are compact and structured, it is easier to manipulate them to generate text with targeted undesirable properties, while at the same time maintain the grammatical correctness and naturalness of the generated sentences. To improve the quality of generated implausible stories, we further apply the adversarial filtering procedure presented by \citet{zellers2018swag} to select a more nuanced set of implausible texts. Experiments show that the evaluation metrics trained on our generated data result in more reliable automatic assessments that correlate remarkably better with human judgments compared to the baselines.
DiSCoL: Toward Engaging Dialogue Systems through Conversational Line Guided Response Generation
Feb 03, 2021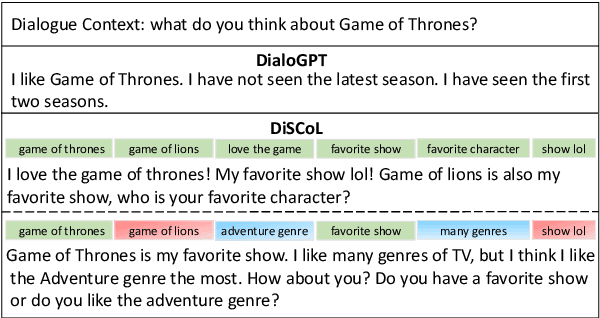
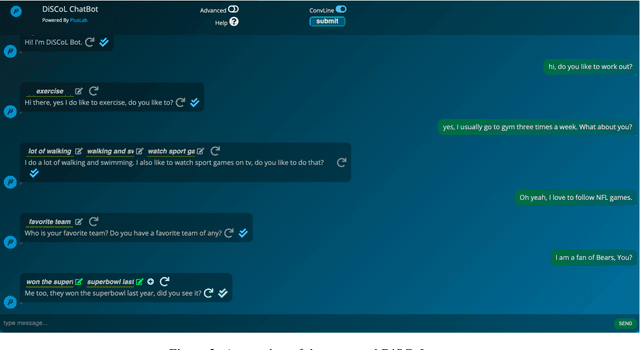
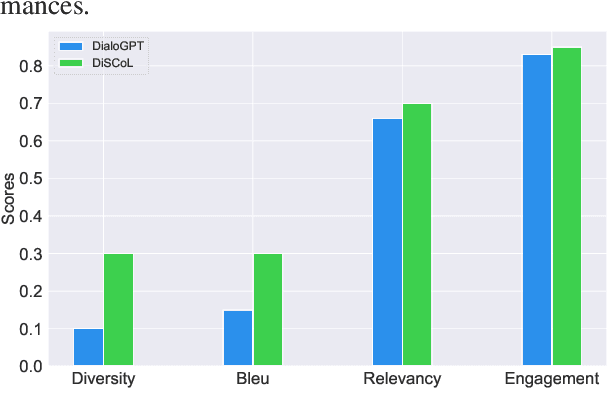
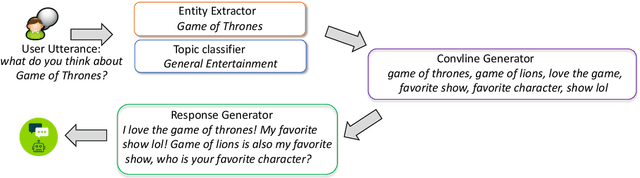
Having engaging and informative conversations with users is the utmost goal for open-domain conversational systems. Recent advances in transformer-based language models and their applications to dialogue systems have succeeded to generate fluent and human-like responses. However, they still lack control over the generation process towards producing contentful responses and achieving engaging conversations. To achieve this goal, we present \textbf{DiSCoL} (\textbf{Di}alogue \textbf{S}ystems through \textbf{Co}versational \textbf{L}ine guided response generation). DiSCoL is an open-domain dialogue system that leverages conversational lines (briefly \textbf{convlines}) as controllable and informative content-planning elements to guide the generation model produce engaging and informative responses. Two primary modules in DiSCoL's pipeline are conditional generators trained for 1) predicting relevant and informative convlines for dialogue contexts and 2) generating high-quality responses conditioned on the predicted convlines. Users can also change the returned convlines to \textit{control} the direction of the conversations towards topics that are more interesting for them. Through automatic and human evaluations, we demonstrate the efficiency of the convlines in producing engaging conversations.