 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactile Grasp Refinement using Deep Reinforcement Learning and Analytic Grasp Stability Metrics
Sep 23, 2021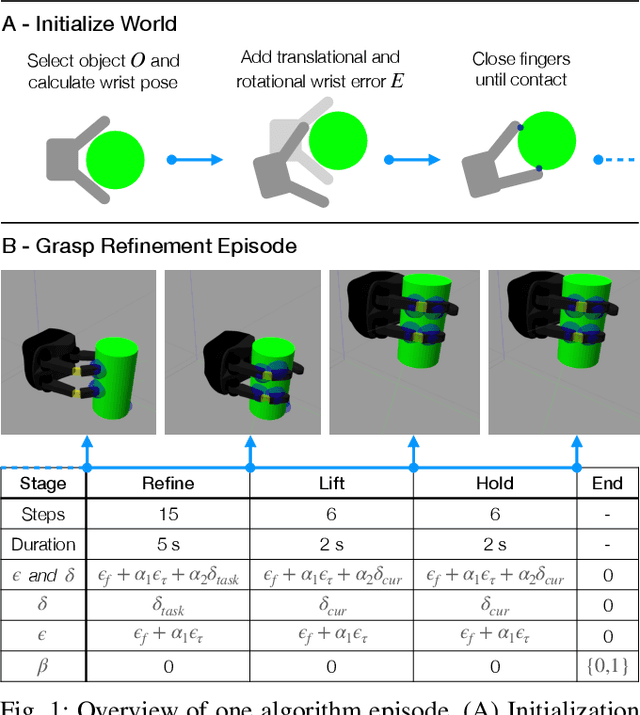
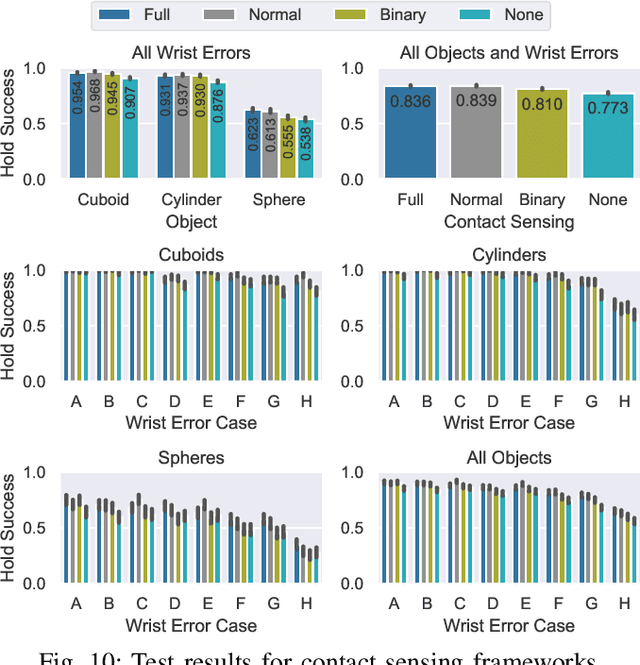
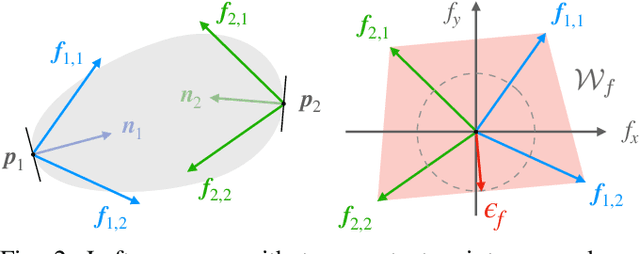
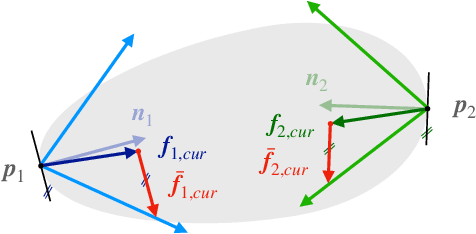
Reward functions are at the heart of every reinforcement learning (RL) algorithm. In robotic grasping, rewards are often complex and manually engineered functions that do not rely on well-justified physical models from grasp analysis. This work demonstrates that analytic grasp stability metrics constitute powerful optimization objectives for RL algorithms that refine grasps on a three-fingered hand using only tactile and joint position information. We outperform a binary-reward baseline by 42.9% and find that a combination of geometric and force-agnostic grasp stability metrics yields the highest average success rates of 95.4% for cuboids, 93.1% for cylinders, and 62.3% for spheres across wrist position errors between 0 and 7 centimeters and rotational errors between 0 and 14 degrees. In a second experiment, we show that grasp refinement algorithms trained with contact feedback (contact positions, normals, and forces) perform up to 6.6% better than a baseline that receives no tactile information.
Low-Cost Fiducial-based 6-Axis Force-Torque Sensor
May 28, 2020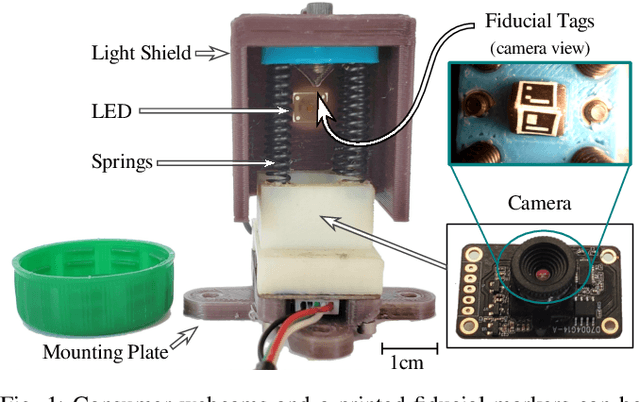
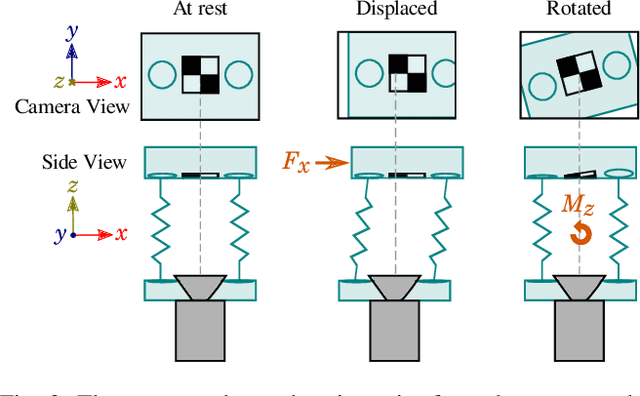
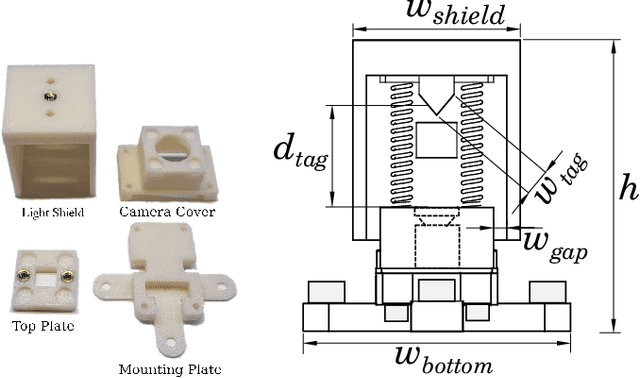
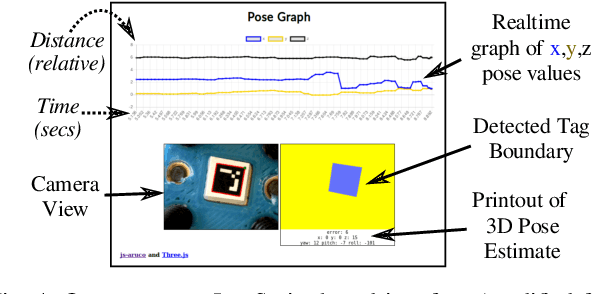
Commercial six-axis force-torque sensors suffer from being some combination of expensive, fragile, and hard-to-use. We propose a new fiducial-based design which addresses all three points. The sensor uses an inexpensive webcam and can be fabricated using a consumer-grade 3D printer. Open-source software is used to estimate the 3D pose of the fiducials on the sensor, which is then used to calculate the applied force-torque. A browser-based (installation free) interface demonstrates ease-of-use. The sensor is very light and can be dropped or thrown with little concern. We characterize our prototype in dynamic conditions under compound loading, finding a mean $R^2$ of over 0.99 for the $F_x, F_y, M_x$, and $M_y$ axes, and over 0.87 and 0.90 for the $F_z$ and $M_z$ axes respectively. The open source design files allow the sensor to be adapted for diverse applications ranging from robot fingers to human-computer interfaces, while the sdesign principle allows for quick changes with minimal technical expertise. This approach promises to bring six-axis force-torque sensing to new applications where the precision, cost, and fragility of traditional strain-gauge based sensors are not appropriate. The open-source sensor design can be viewed at http://sites.google.com/view/fiducialforcesensor.