 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDELTAHANDS: A Synergistic Dexterous Hand Framework Based on Delta Robots
Oct 08, 2023


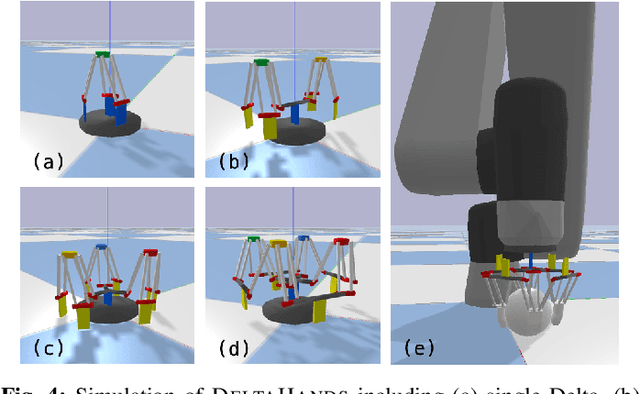
Dexterous robotic manipulation in unstructured environments can aid in everyday tasks such as cleaning and caretaking. Anthropomorphic robotic hands are highly dexterous and theoretically well-suited for working in human domains, but their complex designs and dynamics often make them difficult to control. By contrast, parallel-jaw grippers are easy to control and are used extensively in industrial applications, but they lack the dexterity for various kinds of grasps and in-hand manipulations. In this work, we present DELTAHANDS, a synergistic dexterous hand framework with Delta robots. The DELTAHANDS are soft, easy to reconfigure, simple to manufacture with low-cost off-the-shelf materials, and possess high degrees of freedom that can be easily controlled. DELTAHANDS' dexterity can be adjusted for different applications by leveraging actuation synergies, which can further reduce the control complexity, overall cost, and energy consumption. We characterize the Delta robots' kinematics accuracy, force profiles, and workspace range to assist with hand design. Finally, we evaluate the versatility of DELTAHANDS by grasping a diverse set of objects and by using teleoperation to complete three dexterous manipulation tasks: cloth folding, cap opening, and cable arrangement.
DeltaZ: An Accessible Compliant Delta Robot Manipulator for Research and Education
Jul 02, 2022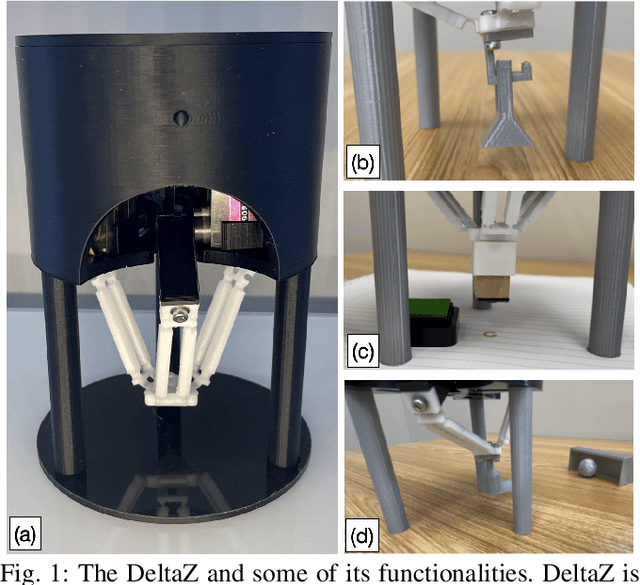


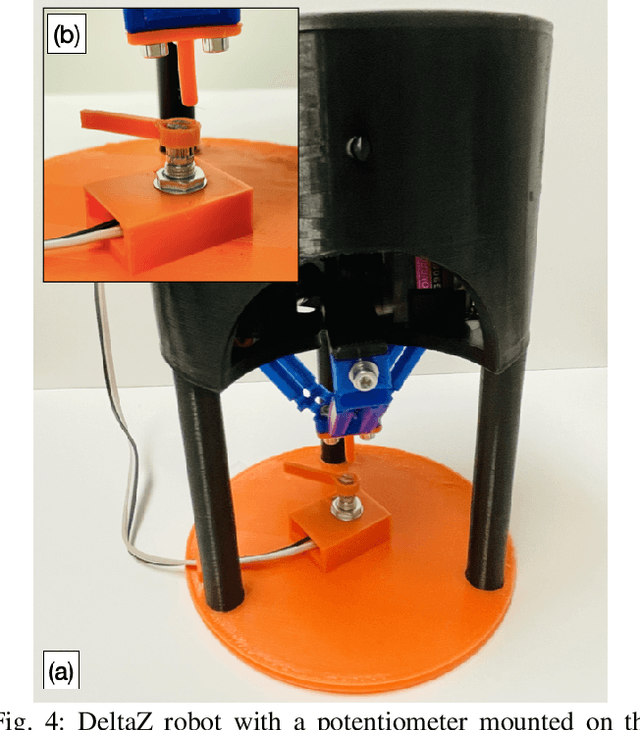
This paper presents the DeltaZ robot, a centimeter-scale, low-cost, delta-style robot that allows for a broad range of capabilities and robust functionalities. Current technologies allow DeltaZ to be 3D-printed from soft and rigid materials so that it is easy to assemble and maintain, and lowers the barriers to utilize. Functionality of the robot stems from its three translational degrees of freedom and a closed form kinematic solution which makes manipulation problems more intuitive compared to other manipulators. Moreover, the low cost of the robot presents an opportunity to democratize manipulators for a research setting. We also describe how the robot can be used as a reinforcement learning benchmark. Open-source 3D-printable designs and code are available to the public.
Linear Delta Arrays for Dexterous Distributed Manipulation
Jun 09, 2022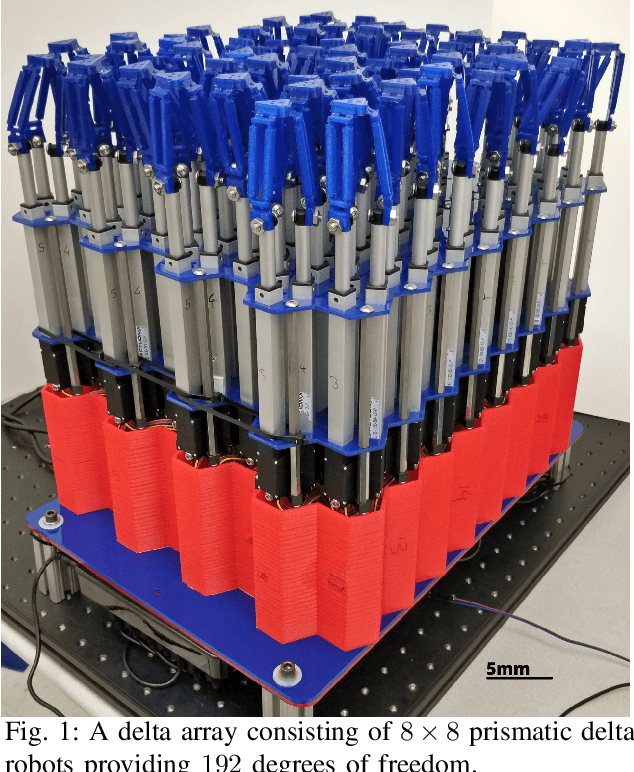



This paper presents a new type of distributed dexterous manipulators: delta arrays. Each delta array consists of a grid of linearly-actuated delta robots with compliant 3D-printed parallelogram links. These arrays can be used to perform planar transportation tasks, similar to smart conveyors. However, the deltas' additional degrees of freedom also afford a wide range of out-of-plane manipulations, as well as prehensile manipulations between sets of deltas. A delta array thus affords a wide range of distributed manipulation strategies. In this paper, we present the design of the delta arrays, including the individual deltas, a modular array structure, and distributed communication and control. We also construct and evaluate an 8x8 array using the proposed design. Our evaluations show that the resulting 192 DoF robot is capable of performing various coordinated distributed manipulations of a variety of objects, including translation, alignment, and prehensile squeezing.