 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDELTAHANDS: A Synergistic Dexterous Hand Framework Based on Delta Robots
Paper and Code
Oct 08, 2023


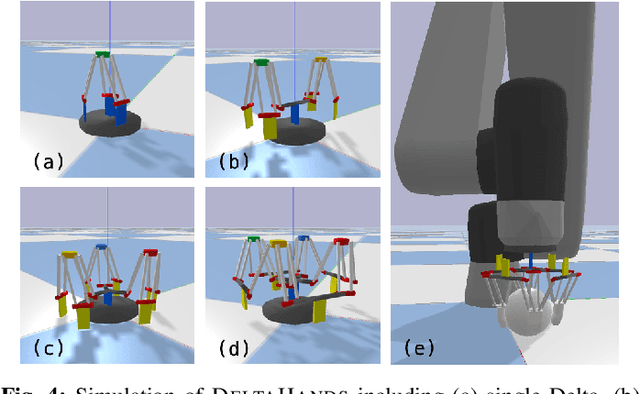
Dexterous robotic manipulation in unstructured environments can aid in everyday tasks such as cleaning and caretaking. Anthropomorphic robotic hands are highly dexterous and theoretically well-suited for working in human domains, but their complex designs and dynamics often make them difficult to control. By contrast, parallel-jaw grippers are easy to control and are used extensively in industrial applications, but they lack the dexterity for various kinds of grasps and in-hand manipulations. In this work, we present DELTAHANDS, a synergistic dexterous hand framework with Delta robots. The DELTAHANDS are soft, easy to reconfigure, simple to manufacture with low-cost off-the-shelf materials, and possess high degrees of freedom that can be easily controlled. DELTAHANDS' dexterity can be adjusted for different applications by leveraging actuation synergies, which can further reduce the control complexity, overall cost, and energy consumption. We characterize the Delta robots' kinematics accuracy, force profiles, and workspace range to assist with hand design. Finally, we evaluate the versatility of DELTAHANDS by grasping a diverse set of objects and by using teleoperation to complete three dexterous manipulation tasks: cloth folding, cap opening, and cable arrangement.