 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeltaZ: An Accessible Compliant Delta Robot Manipulator for Research and Education
Paper and Code
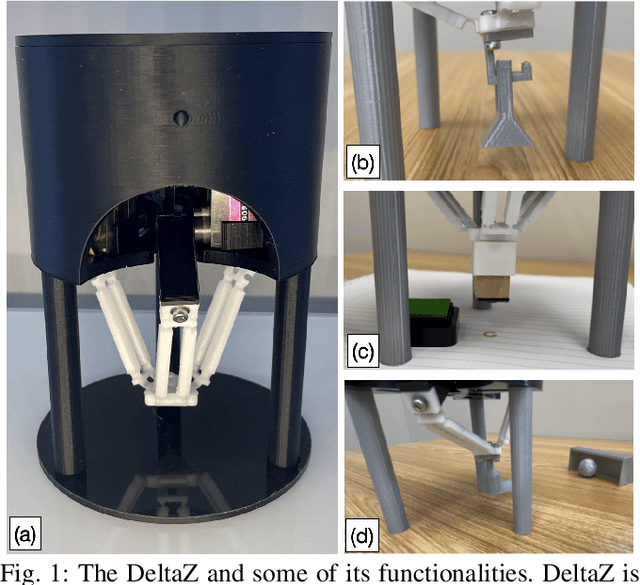


This paper presents the DeltaZ robot, a centimeter-scale, low-cost, delta-style robot that allows for a broad range of capabilities and robust functionalities. Current technologies allow DeltaZ to be 3D-printed from soft and rigid materials so that it is easy to assemble and maintain, and lowers the barriers to utilize. Functionality of the robot stems from its three translational degrees of freedom and a closed form kinematic solution which makes manipulation problems more intuitive compared to other manipulators. Moreover, the low cost of the robot presents an opportunity to democratize manipulators for a research setting. We also describe how the robot can be used as a reinforcement learning benchmark. Open-source 3D-printable designs and code are available to the public.