 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDexWild: Dexterous Human Interactions for In-the-Wild Robot Policies
May 12, 2025Large-scale, diverse robot datasets have emerged as a promising path toward enabling dexterous manipulation policies to generalize to novel environments, but acquiring such datasets presents many challenges. While teleoperation provides high-fidelity datasets, its high cost limits its scalability. Instead, what if people could use their own hands, just as they do in everyday life, to collect data? In DexWild, a diverse team of data collectors uses their hands to collect hours of interactions across a multitude of environments and objects. To record this data, we create DexWild-System, a low-cost, mobile, and easy-to-use device. The DexWild learning framework co-trains on both human and robot demonstrations, leading to improved performance compared to training on each dataset individually. This combination results in robust robot policies capable of generalizing to novel environments, tasks, and embodiments with minimal additional robot-specific data. Experimental results demonstrate that DexWild significantly improves performance, achieving a 68.5% success rate in unseen environments-nearly four times higher than policies trained with robot data only-and offering 5.8x better cross-embodiment generalization. Video results, codebases, and instructions at https://dexwild.github.io
FACTR: Force-Attending Curriculum Training for Contact-Rich Policy Learning
Feb 24, 2025



Many contact-rich tasks humans perform, such as box pickup or rolling dough, rely on force feedback for reliable execution. However, this force information, which is readily available in most robot arms, is not commonly used in teleoperation and policy learning. Consequently, robot behavior is often limited to quasi-static kinematic tasks that do not require intricate force-feedback. In this paper, we first present a low-cost, intuitive, bilateral teleoperation setup that relays external forces of the follower arm back to the teacher arm, facilitating data collection for complex, contact-rich tasks. We then introduce FACTR, a policy learning method that employs a curriculum which corrupts the visual input with decreasing intensity throughout training. The curriculum prevents our transformer-based policy from over-fitting to the visual input and guides the policy to properly attend to the force modality. We demonstrate that by fully utilizing the force information, our method significantly improves generalization to unseen objects by 43\% compared to baseline approaches without a curriculum. Video results and instructions at https://jasonjzliu.com/factr/
Agile Mobility with Rapid Online Adaptation via Meta-learning and Uncertainty-aware MPPI
Oct 09, 2024
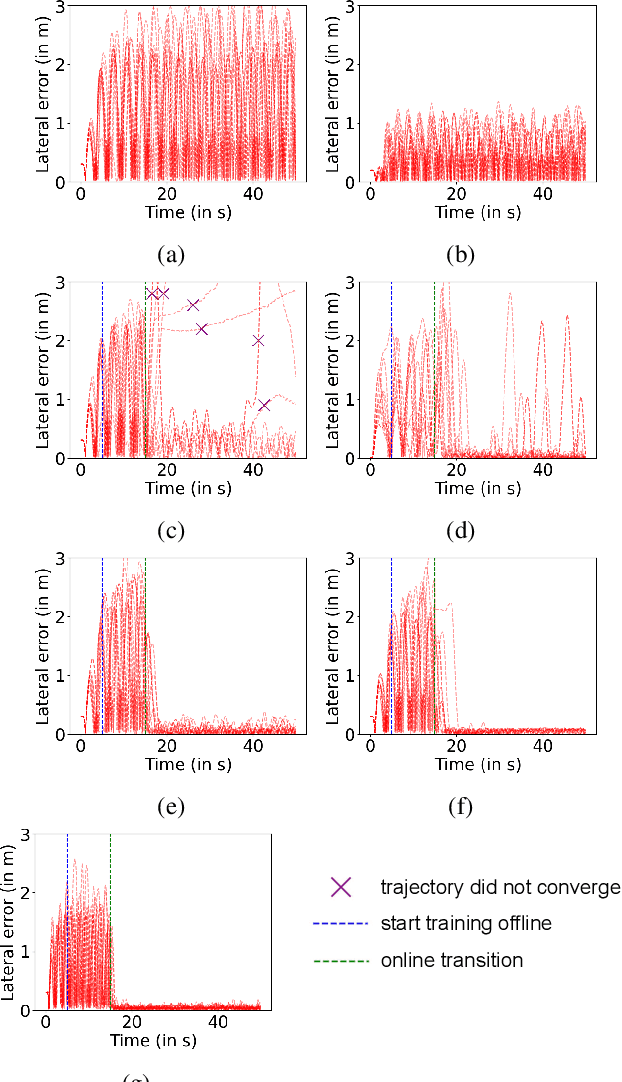


Modern non-linear model-based controllers require an accurate physics model and model parameters to be able to control mobile robots at their limits. Also, due to surface slipping at high speeds, the friction parameters may continually change (like tire degradation in autonomous racing), and the controller may need to adapt rapidly. Many works derive a task-specific robot model with a parameter adaptation scheme that works well for the task but requires a lot of effort and tuning for each platform and task. In this work, we design a full model-learning-based controller based on meta pre-training that can very quickly adapt using few-shot dynamics data to any wheel-based robot with any model parameters, while also reasoning about model uncertainty. We demonstrate our results in small-scale numeric simulation, the large-scale Unity simulator, and on a medium-scale hardware platform with a wide range of settings. We show that our results are comparable to domain-specific well-engineered controllers, and have excellent generalization performance across all scenarios.
AnyCar to Anywhere: Learning Universal Dynamics Model for Agile and Adaptive Mobility
Sep 24, 2024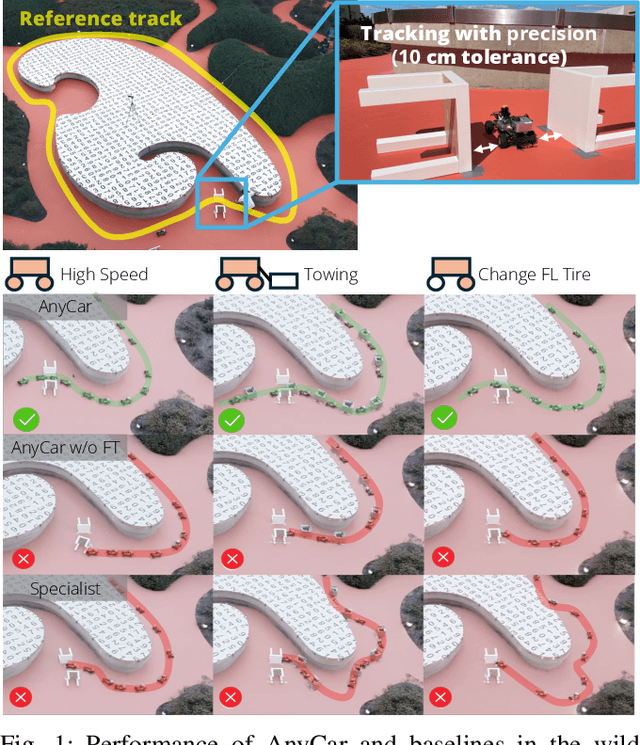
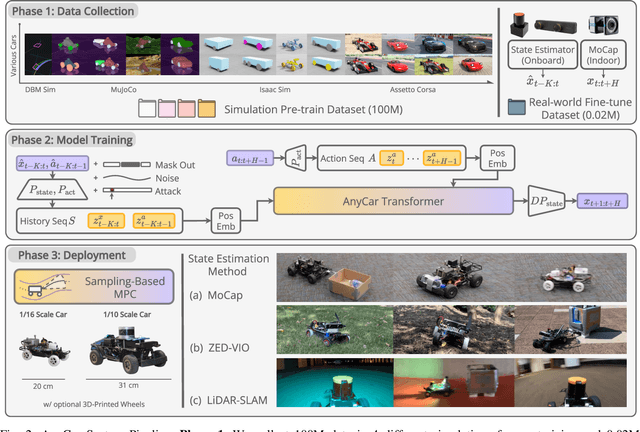


Recent works in the robot learning community have successfully introduced generalist models capable of controlling various robot embodiments across a wide range of tasks, such as navigation and locomotion. However, achieving agile control, which pushes the limits of robotic performance, still relies on specialist models that require extensive parameter tuning. To leverage generalist-model adaptability and flexibility while achieving specialist-level agility, we propose AnyCar, a transformer-based generalist dynamics model designed for agile control of various wheeled robots. To collect training data, we unify multiple simulators and leverage different physics backends to simulate vehicles with diverse sizes, scales, and physical properties across various terrains. With robust training and real-world fine-tuning, our model enables precise adaptation to different vehicles, even in the wild and under large state estimation errors. In real-world experiments, AnyCar shows both few-shot and zero-shot generalization across a wide range of vehicles and environments, where our model, combined with a sampling-based MPC, outperforms specialist models by up to 54%. These results represent a key step toward building a foundation model for agile wheeled robot control. We will also open-source our framework to support further research.
Linear Delta Arrays for Dexterous Distributed Manipulation
Jun 09, 2022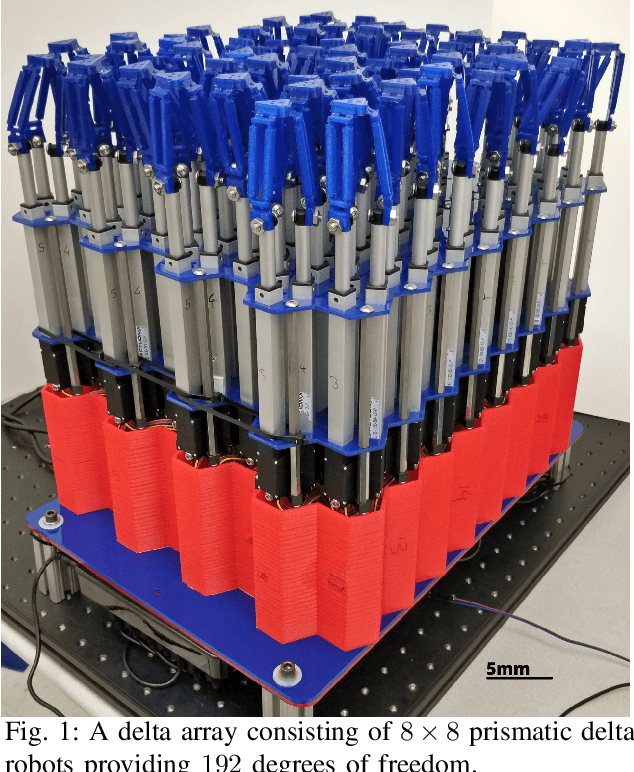



This paper presents a new type of distributed dexterous manipulators: delta arrays. Each delta array consists of a grid of linearly-actuated delta robots with compliant 3D-printed parallelogram links. These arrays can be used to perform planar transportation tasks, similar to smart conveyors. However, the deltas' additional degrees of freedom also afford a wide range of out-of-plane manipulations, as well as prehensile manipulations between sets of deltas. A delta array thus affords a wide range of distributed manipulation strategies. In this paper, we present the design of the delta arrays, including the individual deltas, a modular array structure, and distributed communication and control. We also construct and evaluate an 8x8 array using the proposed design. Our evaluations show that the resulting 192 DoF robot is capable of performing various coordinated distributed manipulations of a variety of objects, including translation, alignment, and prehensile squeezing.