 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeENPIRE: Agentic Robot Policy Self-Improvement in the Real World
Jun 18, 2026Achieving dexterous robotic manipulation in the real world heavily relies on human supervision and algorithm engineering, which becomes a central bottleneck in the pursuit of general physical intelligence. Although emerging coding agents can generate code to automate algorithm search, their successes remain largely confined in digital environments. We conjecture that the missing abstraction to automate robotics research is a repeatable feedback loop for real-world policy improvement: reset the scene, execute a policy, verify the outcome, and refine the next iteration. To bridge this gap, we introduce ENPIRE, a harness framework for coding agents that instantiates this physical feedback routine with four core modules: an Environment module (EN) for automatic reset and verification, a Policy Improvement module (PI) that launches policy refinement, a Rollout module (R) to evaluate policies with one or multiple physical robots operating in parallel, and an Evolution module (E) in which coding agents analyze logs, consult literature, improve training infrastructure and algorithm code to address failure modes. This closed-loop system transforms real-world manipulation learning into a controllable optimization procedure, minimizing human effort while allowing fair ablations across training recipe and agent variants. Powered by ENPIRE, frontier coding agents can autonomously train a policy to achieve a 99% success rate on challenging, dexterous manipulation tasks, such as organizing a pin box, fastening a zip tie, and tool use, a process that further accelerates when we dispatch an agent team on a robot fleet. Our results suggest a practical and scalable path toward deploying coding agents to autonomously advancing robotics in the physical world.
CaP-X: A Framework for Benchmarking and Improving Coding Agents for Robot Manipulation
Mar 23, 2026"Code-as-Policy" considers how executable code can complement data-intensive Vision-Language-Action (VLA) methods, yet their effectiveness as autonomous controllers for embodied manipulation remains underexplored. We present CaP-X, an open-access framework for systematically studying Code-as-Policy agents in robot manipulation. At its core is CaP-Gym, an interactive environment in which agents control robots by synthesizing and executing programs that compose perception and control primitives. Building on this foundation, CaP-Bench evaluates frontier language and vision-language models across varying levels of abstraction, interaction, and perceptual grounding. Across 12 models, CaP-Bench reveals a consistent trend: performance improves with human-crafted abstractions but degrades as these priors are removed, exposing a dependence on designer scaffolding. At the same time, we observe that this gap can be mitigated through scaling agentic test-time computation--through multi-turn interaction, structured execution feedback, visual differencing, automatic skill synthesis, and ensembled reasoning--substantially improves robustness even when agents operate over low-level primitives. These findings allow us to derive CaP-Agent0, a training-free framework that recovers human-level reliability on several manipulation tasks in simulation and on real embodiments. We further introduce CaP-RL, showing reinforcement learning with verifiable rewards improves success rates and transfers from sim2real with minimal gap. Together, CaP-X provides a principled, open-access platform for advancing embodied coding agents.
VIRAL: Visual Sim-to-Real at Scale for Humanoid Loco-Manipulation
Nov 19, 2025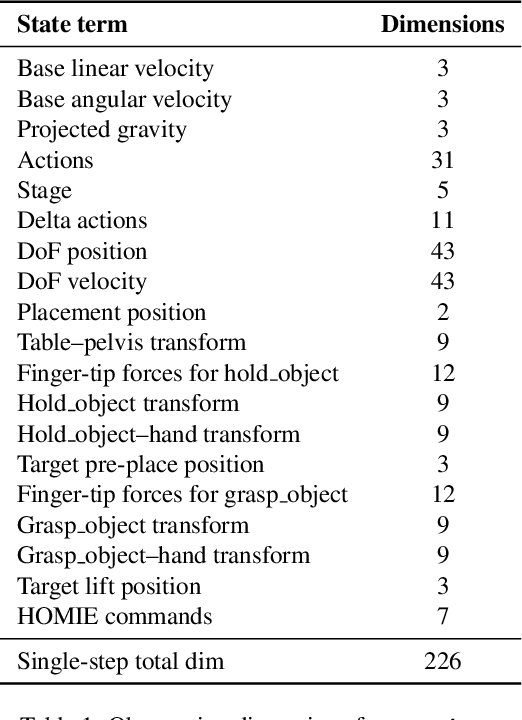
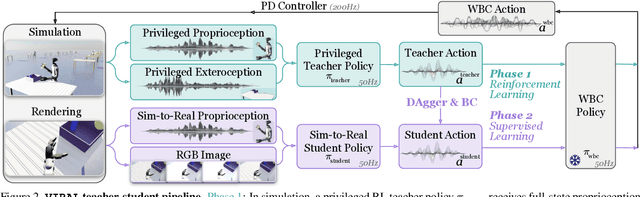
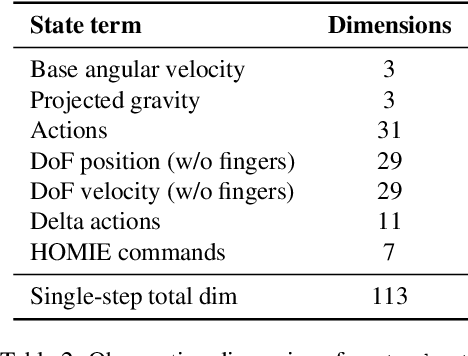
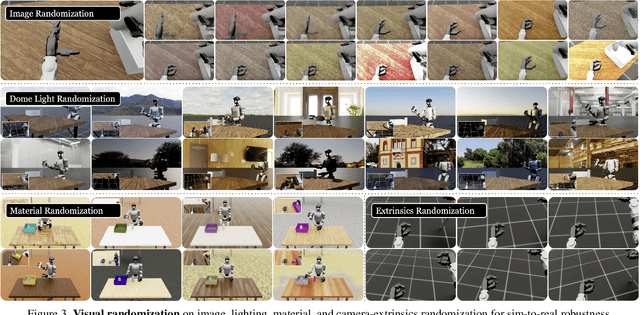
A key barrier to the real-world deployment of humanoid robots is the lack of autonomous loco-manipulation skills. We introduce VIRAL, a visual sim-to-real framework that learns humanoid loco-manipulation entirely in simulation and deploys it zero-shot to real hardware. VIRAL follows a teacher-student design: a privileged RL teacher, operating on full state, learns long-horizon loco-manipulation using a delta action space and reference state initialization. A vision-based student policy is then distilled from the teacher via large-scale simulation with tiled rendering, trained with a mixture of online DAgger and behavior cloning. We find that compute scale is critical: scaling simulation to tens of GPUs (up to 64) makes both teacher and student training reliable, while low-compute regimes often fail. To bridge the sim-to-real gap, VIRAL combines large-scale visual domain randomization over lighting, materials, camera parameters, image quality, and sensor delays--with real-to-sim alignment of the dexterous hands and cameras. Deployed on a Unitree G1 humanoid, the resulting RGB-based policy performs continuous loco-manipulation for up to 54 cycles, generalizing to diverse spatial and appearance variations without any real-world fine-tuning, and approaching expert-level teleoperation performance. Extensive ablations dissect the key design choices required to make RGB-based humanoid loco-manipulation work in practice.
SONIC: Supersizing Motion Tracking for Natural Humanoid Whole-Body Control
Nov 11, 2025Despite the rise of billion-parameter foundation models trained across thousands of GPUs, similar scaling gains have not been shown for humanoid control. Current neural controllers for humanoids remain modest in size, target a limited behavior set, and are trained on a handful of GPUs over several days. We show that scaling up model capacity, data, and compute yields a generalist humanoid controller capable of creating natural and robust whole-body movements. Specifically, we posit motion tracking as a natural and scalable task for humanoid control, leverageing dense supervision from diverse motion-capture data to acquire human motion priors without manual reward engineering. We build a foundation model for motion tracking by scaling along three axes: network size (from 1.2M to 42M parameters), dataset volume (over 100M frames, 700 hours of high-quality motion data), and compute (9k GPU hours). Beyond demonstrating the benefits of scale, we show the practical utility of our model through two mechanisms: (1) a real-time universal kinematic planner that bridges motion tracking to downstream task execution, enabling natural and interactive control, and (2) a unified token space that supports various motion input interfaces, such as VR teleoperation devices, human videos, and vision-language-action (VLA) models, all using the same policy. Scaling motion tracking exhibits favorable properties: performance improves steadily with increased compute and data diversity, and learned representations generalize to unseen motions, establishing motion tracking at scale as a practical foundation for humanoid control.
Learning Gentle Humanoid Locomotion and End-Effector Stabilization Control
May 30, 2025Can your humanoid walk up and hand you a full cup of beer, without spilling a drop? While humanoids are increasingly featured in flashy demos like dancing, delivering packages, traversing rough terrain, fine-grained control during locomotion remains a significant challenge. In particular, stabilizing a filled end-effector (EE) while walking is far from solved, due to a fundamental mismatch in task dynamics: locomotion demands slow-timescale, robust control, whereas EE stabilization requires rapid, high-precision corrections. To address this, we propose SoFTA, a Slow-Fast TwoAgent framework that decouples upper-body and lower-body control into separate agents operating at different frequencies and with distinct rewards. This temporal and objective separation mitigates policy interference and enables coordinated whole-body behavior. SoFTA executes upper-body actions at 100 Hz for precise EE control and lower-body actions at 50 Hz for robust gait. It reduces EE acceleration by 2-5x relative to baselines and performs much closer to human-level stability, enabling delicate tasks such as carrying nearly full cups, capturing steady video during locomotion, and disturbance rejection with EE stability.
Emergent Active Perception and Dexterity of Simulated Humanoids from Visual Reinforcement Learning
May 18, 2025Human behavior is fundamentally shaped by visual perception -- our ability to interact with the world depends on actively gathering relevant information and adapting our movements accordingly. Behaviors like searching for objects, reaching, and hand-eye coordination naturally emerge from the structure of our sensory system. Inspired by these principles, we introduce Perceptive Dexterous Control (PDC), a framework for vision-driven dexterous whole-body control with simulated humanoids. PDC operates solely on egocentric vision for task specification, enabling object search, target placement, and skill selection through visual cues, without relying on privileged state information (e.g., 3D object positions and geometries). This perception-as-interface paradigm enables learning a single policy to perform multiple household tasks, including reaching, grasping, placing, and articulated object manipulation. We also show that training from scratch with reinforcement learning can produce emergent behaviors such as active search. These results demonstrate how vision-driven control and complex tasks induce human-like behaviors and can serve as the key ingredients in closing the perception-action loop for animation, robotics, and embodied AI.
ASAP: Aligning Simulation and Real-World Physics for Learning Agile Humanoid Whole-Body Skills
Feb 03, 2025Humanoid robots hold the potential for unparalleled versatility in performing human-like, whole-body skills. However, achieving agile and coordinated whole-body motions remains a significant challenge due to the dynamics mismatch between simulation and the real world. Existing approaches, such as system identification (SysID) and domain randomization (DR) methods, often rely on labor-intensive parameter tuning or result in overly conservative policies that sacrifice agility. In this paper, we present ASAP (Aligning Simulation and Real-World Physics), a two-stage framework designed to tackle the dynamics mismatch and enable agile humanoid whole-body skills. In the first stage, we pre-train motion tracking policies in simulation using retargeted human motion data. In the second stage, we deploy the policies in the real world and collect real-world data to train a delta (residual) action model that compensates for the dynamics mismatch. Then, ASAP fine-tunes pre-trained policies with the delta action model integrated into the simulator to align effectively with real-world dynamics. We evaluate ASAP across three transfer scenarios: IsaacGym to IsaacSim, IsaacGym to Genesis, and IsaacGym to the real-world Unitree G1 humanoid robot. Our approach significantly improves agility and whole-body coordination across various dynamic motions, reducing tracking error compared to SysID, DR, and delta dynamics learning baselines. ASAP enables highly agile motions that were previously difficult to achieve, demonstrating the potential of delta action learning in bridging simulation and real-world dynamics. These results suggest a promising sim-to-real direction for developing more expressive and agile humanoids.
HOVER: Versatile Neural Whole-Body Controller for Humanoid Robots
Oct 28, 2024



Humanoid whole-body control requires adapting to diverse tasks such as navigation, loco-manipulation, and tabletop manipulation, each demanding a different mode of control. For example, navigation relies on root velocity tracking, while tabletop manipulation prioritizes upper-body joint angle tracking. Existing approaches typically train individual policies tailored to a specific command space, limiting their transferability across modes. We present the key insight that full-body kinematic motion imitation can serve as a common abstraction for all these tasks and provide general-purpose motor skills for learning multiple modes of whole-body control. Building on this, we propose HOVER (Humanoid Versatile Controller), a multi-mode policy distillation framework that consolidates diverse control modes into a unified policy. HOVER enables seamless transitions between control modes while preserving the distinct advantages of each, offering a robust and scalable solution for humanoid control across a wide range of modes. By eliminating the need for policy retraining for each control mode, our approach improves efficiency and flexibility for future humanoid applications.
Agile Mobility with Rapid Online Adaptation via Meta-learning and Uncertainty-aware MPPI
Oct 09, 2024


Modern non-linear model-based controllers require an accurate physics model and model parameters to be able to control mobile robots at their limits. Also, due to surface slipping at high speeds, the friction parameters may continually change (like tire degradation in autonomous racing), and the controller may need to adapt rapidly. Many works derive a task-specific robot model with a parameter adaptation scheme that works well for the task but requires a lot of effort and tuning for each platform and task. In this work, we design a full model-learning-based controller based on meta pre-training that can very quickly adapt using few-shot dynamics data to any wheel-based robot with any model parameters, while also reasoning about model uncertainty. We demonstrate our results in small-scale numeric simulation, the large-scale Unity simulator, and on a medium-scale hardware platform with a wide range of settings. We show that our results are comparable to domain-specific well-engineered controllers, and have excellent generalization performance across all scenarios.
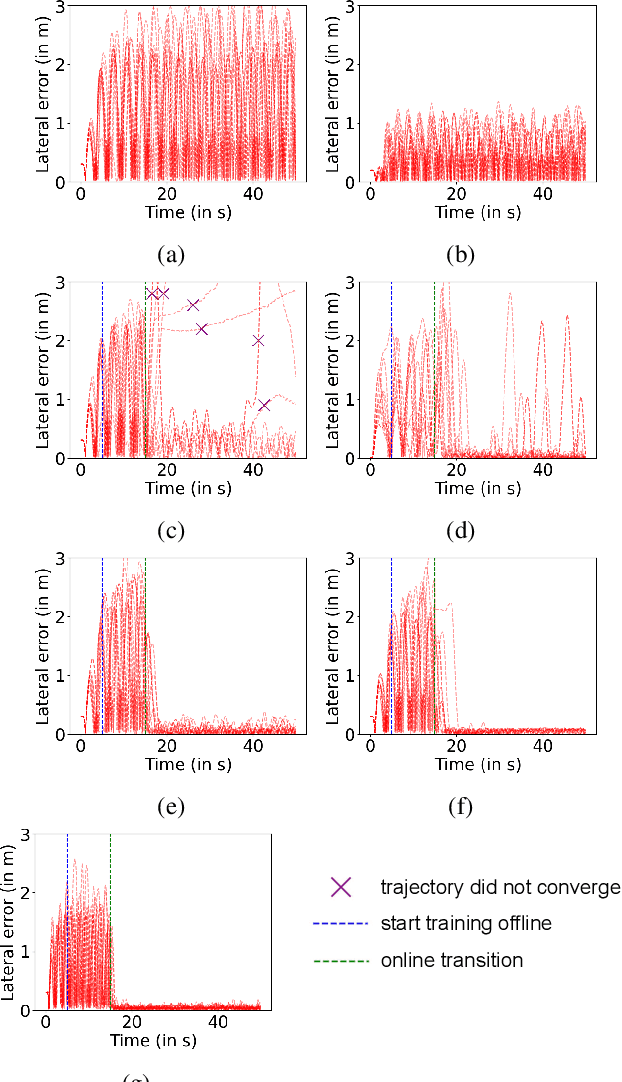
AnyCar to Anywhere: Learning Universal Dynamics Model for Agile and Adaptive Mobility
Sep 24, 2024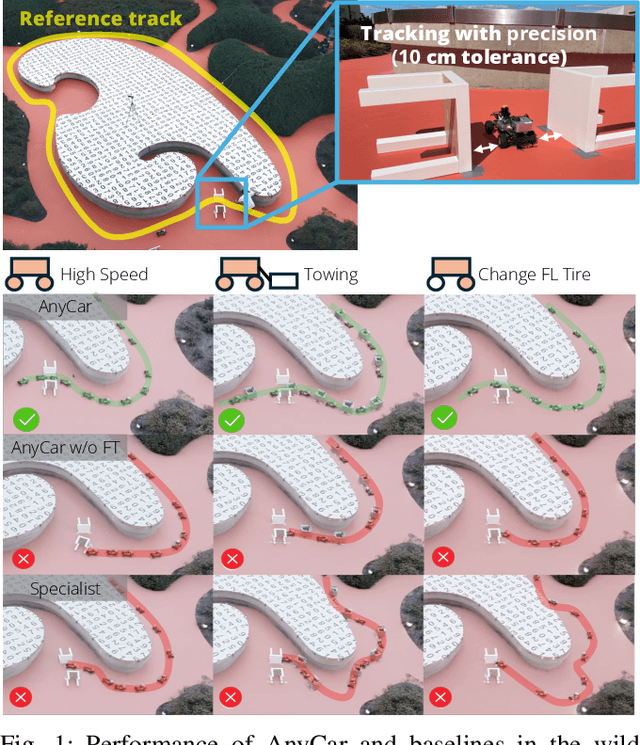
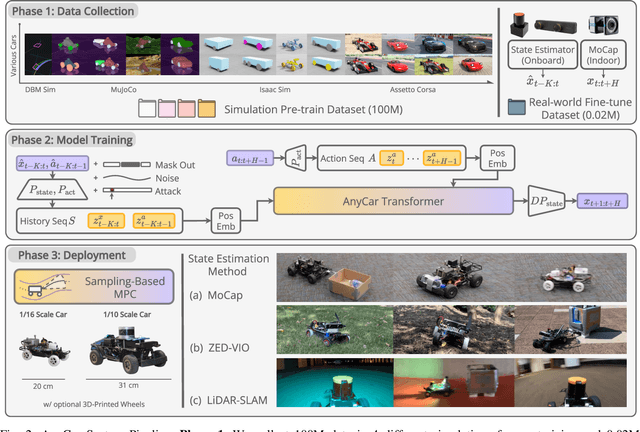


Recent works in the robot learning community have successfully introduced generalist models capable of controlling various robot embodiments across a wide range of tasks, such as navigation and locomotion. However, achieving agile control, which pushes the limits of robotic performance, still relies on specialist models that require extensive parameter tuning. To leverage generalist-model adaptability and flexibility while achieving specialist-level agility, we propose AnyCar, a transformer-based generalist dynamics model designed for agile control of various wheeled robots. To collect training data, we unify multiple simulators and leverage different physics backends to simulate vehicles with diverse sizes, scales, and physical properties across various terrains. With robust training and real-world fine-tuning, our model enables precise adaptation to different vehicles, even in the wild and under large state estimation errors. In real-world experiments, AnyCar shows both few-shot and zero-shot generalization across a wide range of vehicles and environments, where our model, combined with a sampling-based MPC, outperforms specialist models by up to 54%. These results represent a key step toward building a foundation model for agile wheeled robot control. We will also open-source our framework to support further research.