 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeENPIRE: Agentic Robot Policy Self-Improvement in the Real World
Jun 18, 2026Achieving dexterous robotic manipulation in the real world heavily relies on human supervision and algorithm engineering, which becomes a central bottleneck in the pursuit of general physical intelligence. Although emerging coding agents can generate code to automate algorithm search, their successes remain largely confined in digital environments. We conjecture that the missing abstraction to automate robotics research is a repeatable feedback loop for real-world policy improvement: reset the scene, execute a policy, verify the outcome, and refine the next iteration. To bridge this gap, we introduce ENPIRE, a harness framework for coding agents that instantiates this physical feedback routine with four core modules: an Environment module (EN) for automatic reset and verification, a Policy Improvement module (PI) that launches policy refinement, a Rollout module (R) to evaluate policies with one or multiple physical robots operating in parallel, and an Evolution module (E) in which coding agents analyze logs, consult literature, improve training infrastructure and algorithm code to address failure modes. This closed-loop system transforms real-world manipulation learning into a controllable optimization procedure, minimizing human effort while allowing fair ablations across training recipe and agent variants. Powered by ENPIRE, frontier coding agents can autonomously train a policy to achieve a 99% success rate on challenging, dexterous manipulation tasks, such as organizing a pin box, fastening a zip tie, and tool use, a process that further accelerates when we dispatch an agent team on a robot fleet. Our results suggest a practical and scalable path toward deploying coding agents to autonomously advancing robotics in the physical world.
CaP-X: A Framework for Benchmarking and Improving Coding Agents for Robot Manipulation
Mar 23, 2026"Code-as-Policy" considers how executable code can complement data-intensive Vision-Language-Action (VLA) methods, yet their effectiveness as autonomous controllers for embodied manipulation remains underexplored. We present CaP-X, an open-access framework for systematically studying Code-as-Policy agents in robot manipulation. At its core is CaP-Gym, an interactive environment in which agents control robots by synthesizing and executing programs that compose perception and control primitives. Building on this foundation, CaP-Bench evaluates frontier language and vision-language models across varying levels of abstraction, interaction, and perceptual grounding. Across 12 models, CaP-Bench reveals a consistent trend: performance improves with human-crafted abstractions but degrades as these priors are removed, exposing a dependence on designer scaffolding. At the same time, we observe that this gap can be mitigated through scaling agentic test-time computation--through multi-turn interaction, structured execution feedback, visual differencing, automatic skill synthesis, and ensembled reasoning--substantially improves robustness even when agents operate over low-level primitives. These findings allow us to derive CaP-Agent0, a training-free framework that recovers human-level reliability on several manipulation tasks in simulation and on real embodiments. We further introduce CaP-RL, showing reinforcement learning with verifiable rewards improves success rates and transfers from sim2real with minimal gap. Together, CaP-X provides a principled, open-access platform for advancing embodied coding agents.
VIRAL: Visual Sim-to-Real at Scale for Humanoid Loco-Manipulation
Nov 19, 2025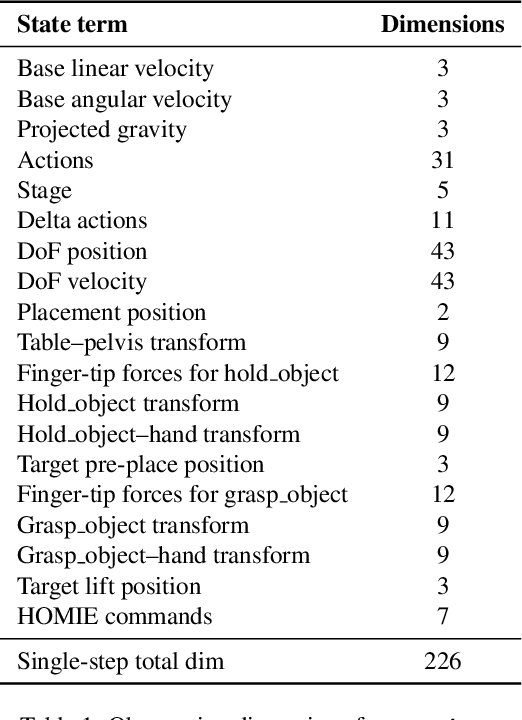
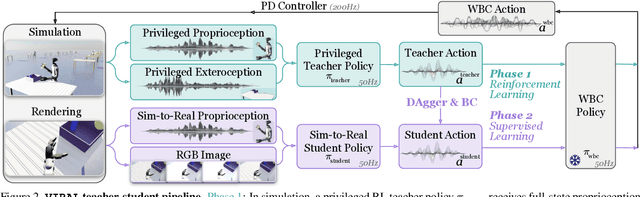
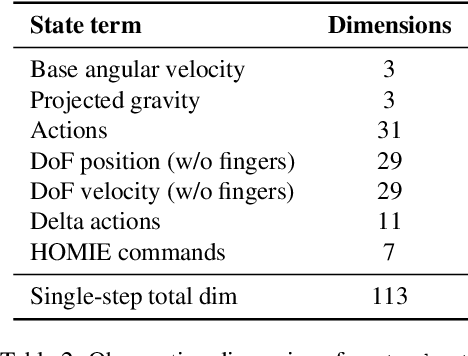
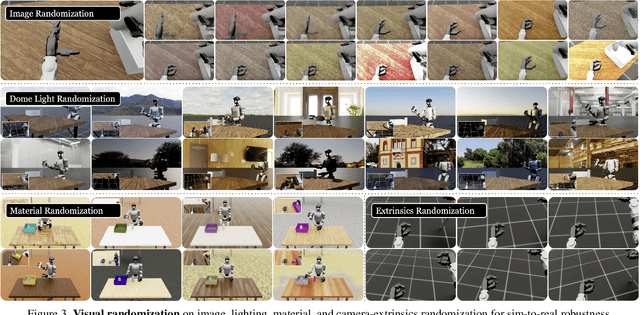
A key barrier to the real-world deployment of humanoid robots is the lack of autonomous loco-manipulation skills. We introduce VIRAL, a visual sim-to-real framework that learns humanoid loco-manipulation entirely in simulation and deploys it zero-shot to real hardware. VIRAL follows a teacher-student design: a privileged RL teacher, operating on full state, learns long-horizon loco-manipulation using a delta action space and reference state initialization. A vision-based student policy is then distilled from the teacher via large-scale simulation with tiled rendering, trained with a mixture of online DAgger and behavior cloning. We find that compute scale is critical: scaling simulation to tens of GPUs (up to 64) makes both teacher and student training reliable, while low-compute regimes often fail. To bridge the sim-to-real gap, VIRAL combines large-scale visual domain randomization over lighting, materials, camera parameters, image quality, and sensor delays--with real-to-sim alignment of the dexterous hands and cameras. Deployed on a Unitree G1 humanoid, the resulting RGB-based policy performs continuous loco-manipulation for up to 54 cycles, generalizing to diverse spatial and appearance variations without any real-world fine-tuning, and approaching expert-level teleoperation performance. Extensive ablations dissect the key design choices required to make RGB-based humanoid loco-manipulation work in practice.
SONIC: Supersizing Motion Tracking for Natural Humanoid Whole-Body Control
Nov 11, 2025Despite the rise of billion-parameter foundation models trained across thousands of GPUs, similar scaling gains have not been shown for humanoid control. Current neural controllers for humanoids remain modest in size, target a limited behavior set, and are trained on a handful of GPUs over several days. We show that scaling up model capacity, data, and compute yields a generalist humanoid controller capable of creating natural and robust whole-body movements. Specifically, we posit motion tracking as a natural and scalable task for humanoid control, leverageing dense supervision from diverse motion-capture data to acquire human motion priors without manual reward engineering. We build a foundation model for motion tracking by scaling along three axes: network size (from 1.2M to 42M parameters), dataset volume (over 100M frames, 700 hours of high-quality motion data), and compute (9k GPU hours). Beyond demonstrating the benefits of scale, we show the practical utility of our model through two mechanisms: (1) a real-time universal kinematic planner that bridges motion tracking to downstream task execution, enabling natural and interactive control, and (2) a unified token space that supports various motion input interfaces, such as VR teleoperation devices, human videos, and vision-language-action (VLA) models, all using the same policy. Scaling motion tracking exhibits favorable properties: performance improves steadily with increased compute and data diversity, and learned representations generalize to unseen motions, establishing motion tracking at scale as a practical foundation for humanoid control.
LeVERB: Humanoid Whole-Body Control with Latent Vision-Language Instruction
Jun 16, 2025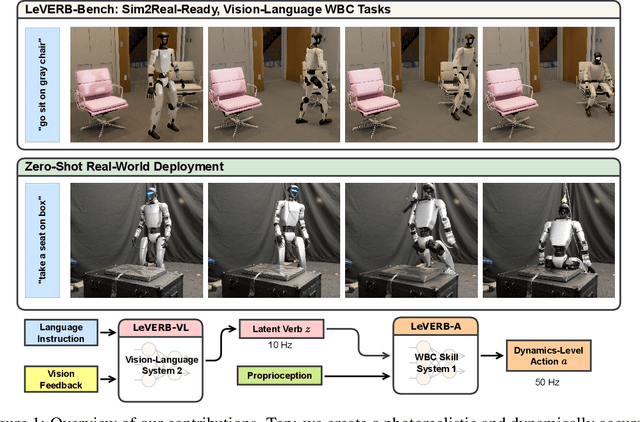
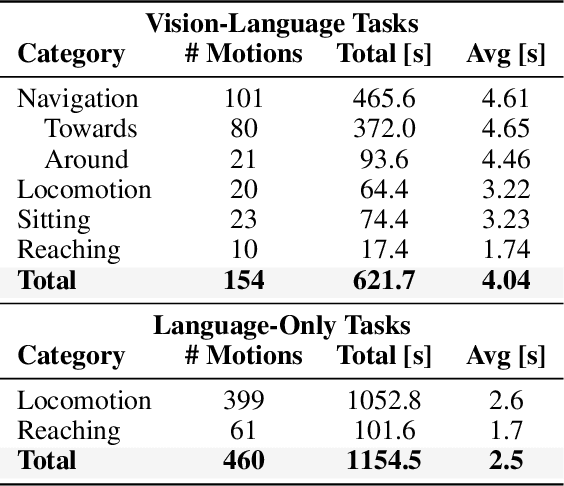
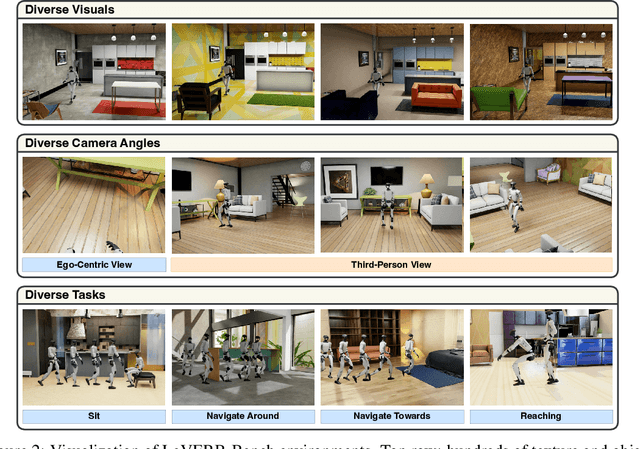
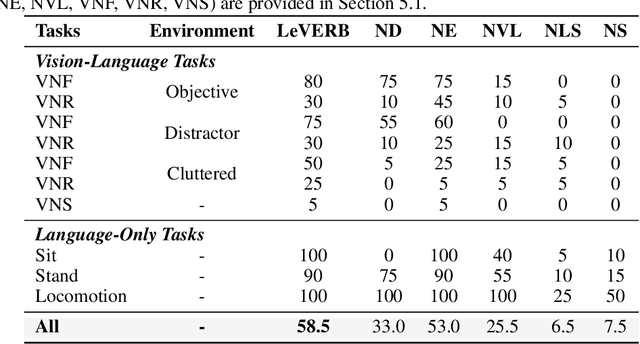
Vision-language-action (VLA) models have demonstrated strong semantic understanding and zero-shot generalization, yet most existing systems assume an accurate low-level controller with hand-crafted action "vocabulary" such as end-effector pose or root velocity. This assumption confines prior work to quasi-static tasks and precludes the agile, whole-body behaviors required by humanoid whole-body control (WBC) tasks. To capture this gap in the literature, we start by introducing the first sim-to-real-ready, vision-language, closed-loop benchmark for humanoid WBC, comprising over 150 tasks from 10 categories. We then propose LeVERB: Latent Vision-Language-Encoded Robot Behavior, a hierarchical latent instruction-following framework for humanoid vision-language WBC, the first of its kind. At the top level, a vision-language policy learns a latent action vocabulary from synthetically rendered kinematic demonstrations; at the low level, a reinforcement-learned WBC policy consumes these latent verbs to generate dynamics-level commands. In our benchmark, LeVERB can zero-shot attain a 80% success rate on simple visual navigation tasks, and 58.5% success rate overall, outperforming naive hierarchical whole-body VLA implementation by 7.8 times.
Pre-training Auto-regressive Robotic Models with 4D Representations
Feb 18, 2025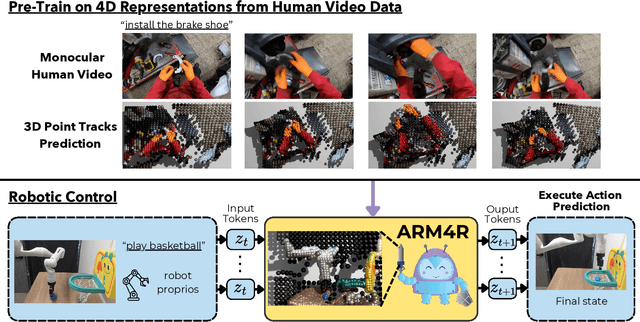
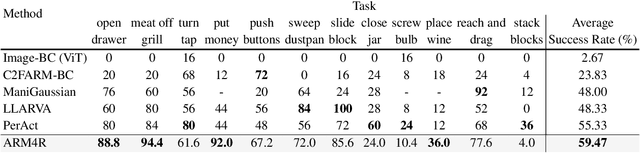
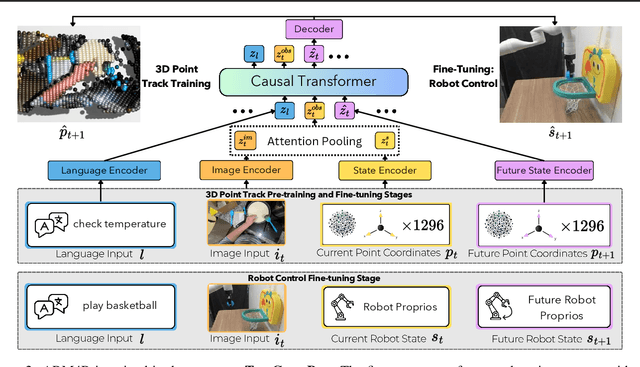
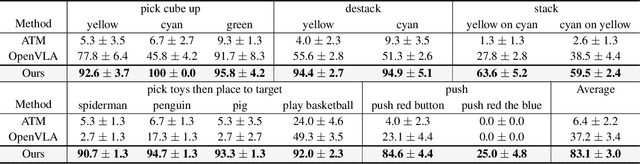
Foundation models pre-trained on massive unlabeled datasets have revolutionized natural language and computer vision, exhibiting remarkable generalization capabilities, thus highlighting the importance of pre-training. Yet, efforts in robotics have struggled to achieve similar success, limited by either the need for costly robotic annotations or the lack of representations that effectively model the physical world. In this paper, we introduce ARM4R, an Auto-regressive Robotic Model that leverages low-level 4D Representations learned from human video data to yield a better pre-trained robotic model. Specifically, we focus on utilizing 3D point tracking representations from videos derived by lifting 2D representations into 3D space via monocular depth estimation across time. These 4D representations maintain a shared geometric structure between the points and robot state representations up to a linear transformation, enabling efficient transfer learning from human video data to low-level robotic control. Our experiments show that ARM4R can transfer efficiently from human video data to robotics and consistently improves performance on tasks across various robot environments and configurations.
Agile Mobility with Rapid Online Adaptation via Meta-learning and Uncertainty-aware MPPI
Oct 09, 2024


Modern non-linear model-based controllers require an accurate physics model and model parameters to be able to control mobile robots at their limits. Also, due to surface slipping at high speeds, the friction parameters may continually change (like tire degradation in autonomous racing), and the controller may need to adapt rapidly. Many works derive a task-specific robot model with a parameter adaptation scheme that works well for the task but requires a lot of effort and tuning for each platform and task. In this work, we design a full model-learning-based controller based on meta pre-training that can very quickly adapt using few-shot dynamics data to any wheel-based robot with any model parameters, while also reasoning about model uncertainty. We demonstrate our results in small-scale numeric simulation, the large-scale Unity simulator, and on a medium-scale hardware platform with a wide range of settings. We show that our results are comparable to domain-specific well-engineered controllers, and have excellent generalization performance across all scenarios.
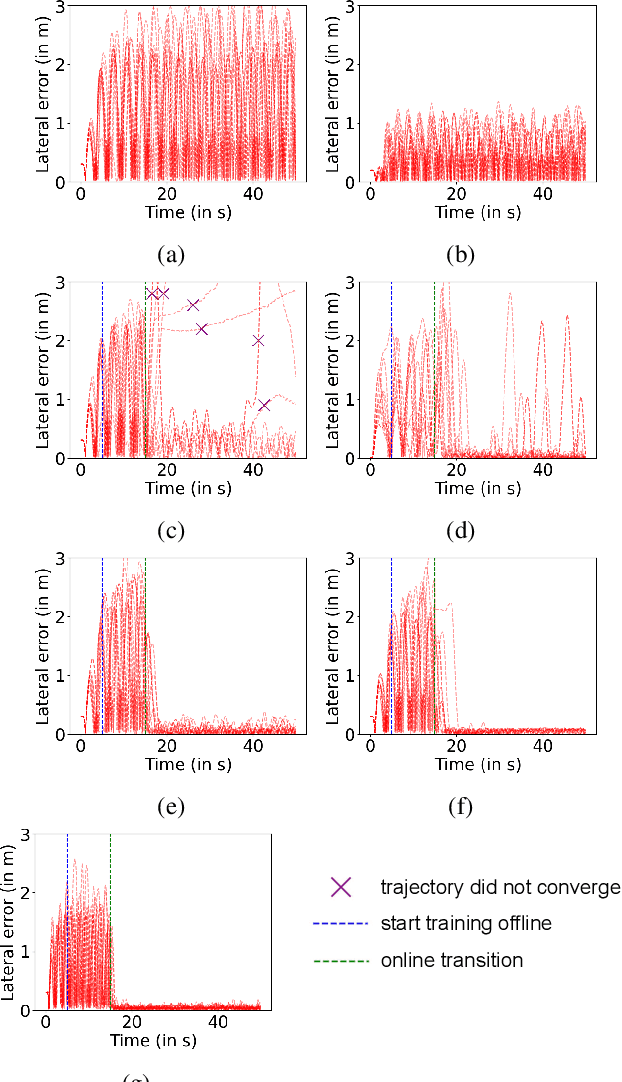
AnyCar to Anywhere: Learning Universal Dynamics Model for Agile and Adaptive Mobility
Sep 24, 2024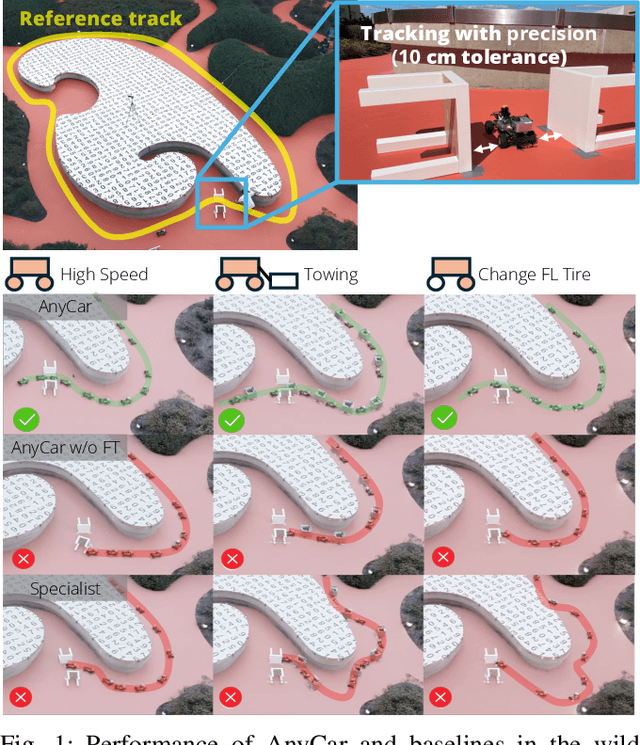
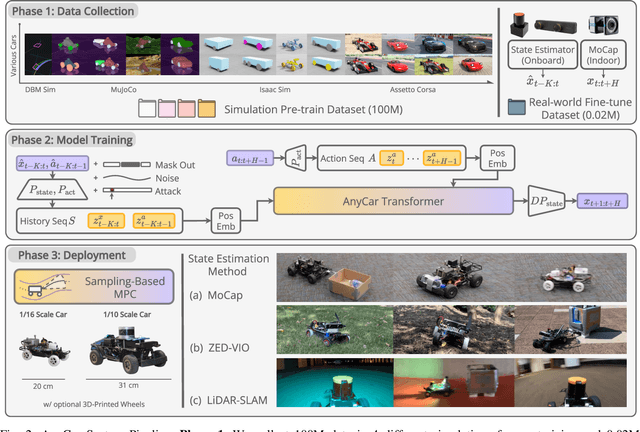


Recent works in the robot learning community have successfully introduced generalist models capable of controlling various robot embodiments across a wide range of tasks, such as navigation and locomotion. However, achieving agile control, which pushes the limits of robotic performance, still relies on specialist models that require extensive parameter tuning. To leverage generalist-model adaptability and flexibility while achieving specialist-level agility, we propose AnyCar, a transformer-based generalist dynamics model designed for agile control of various wheeled robots. To collect training data, we unify multiple simulators and leverage different physics backends to simulate vehicles with diverse sizes, scales, and physical properties across various terrains. With robust training and real-world fine-tuning, our model enables precise adaptation to different vehicles, even in the wild and under large state estimation errors. In real-world experiments, AnyCar shows both few-shot and zero-shot generalization across a wide range of vehicles and environments, where our model, combined with a sampling-based MPC, outperforms specialist models by up to 54%. These results represent a key step toward building a foundation model for agile wheeled robot control. We will also open-source our framework to support further research.
WROOM: An Autonomous Driving Approach for Off-Road Navigation
Apr 12, 2024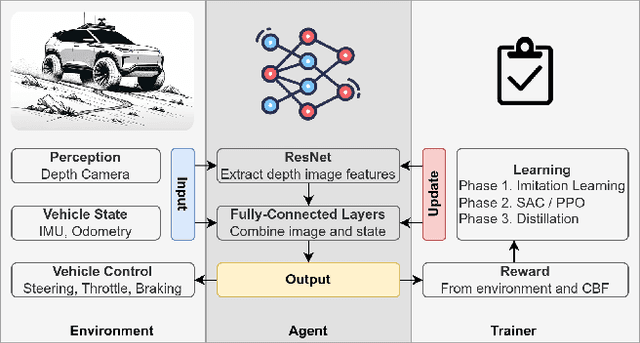
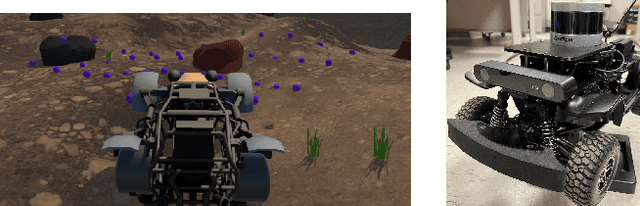
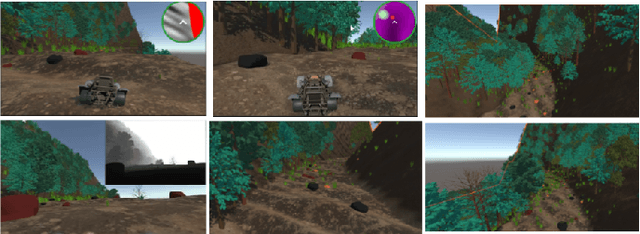

Off-road navigation is a challenging problem both at the planning level to get a smooth trajectory and at the control level to avoid flipping over, hitting obstacles, or getting stuck at a rough patch. There have been several recent works using classical approaches involving depth map prediction followed by smooth trajectory planning and using a controller to track it. We design an end-to-end reinforcement learning (RL) system for an autonomous vehicle in off-road environments using a custom-designed simulator in the Unity game engine. We warm-start the agent by imitating a rule-based controller and utilize Proximal Policy Optimization (PPO) to improve the policy based on a reward that incorporates Control Barrier Functions (CBF), facilitating the agent's ability to generalize effectively to real-world scenarios. The training involves agents concurrently undergoing domain-randomized trials in various environments. We also propose a novel simulation environment to replicate off-road driving scenarios and deploy our proposed approach on a real buggy RC car. Videos and additional results: https://sites.google.com/view/wroom-utd/home
Segment Anything Model for Road Network Graph Extraction
Mar 31, 2024



We propose SAM-Road, an adaptation of the Segment Anything Model (SAM) for extracting large-scale, vectorized road network graphs from satellite imagery. To predict graph geometry, we formulate it as a dense semantic segmentation task, leveraging the inherent strengths of SAM. The image encoder of SAM is fine-tuned to produce probability masks for roads and intersections, from which the graph vertices are extracted via simple non-maximum suppression. To predict graph topology, we designed a lightweight transformer-based graph neural network, which leverages the SAM image embeddings to estimate the edge existence probabilities between vertices. Our approach directly predicts the graph vertices and edges for large regions without expensive and complex post-processing heuristics, and is capable of building complete road network graphs spanning multiple square kilometers in a matter of seconds. With its simple, straightforward, and minimalist design, SAM-Road achieves comparable accuracy with the state-of-the-art method RNGDet++, while being 40 times faster on the City-scale dataset. We thus demonstrate the power of a foundational vision model when applied to a graph learning task. The code is available at https://github.com/htcr/sam_road.