 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Multi-Robot Coordination and Cooperation with Task Precedence Relationships
Sep 18, 2025



We propose a new formulation for the multi-robot task allocation problem that incorporates (a) complex precedence relationships between tasks, (b) efficient intra-task coordination, and (c) cooperation through the formation of robot coalitions. A task graph specifies the tasks and their relationships, and a set of reward functions models the effects of coalition size and preceding task performance. Maximizing task rewards is NP-hard; hence, we propose network flow-based algorithms to approximate solutions efficiently. A novel online algorithm performs iterative re-allocation, providing robustness to task failures and model inaccuracies to achieve higher performance than offline approaches. We comprehensively evaluate the algorithms in a testbed with random missions and reward functions and compare them to a mixed-integer solver and a greedy heuristic. Additionally, we validate the overall approach in an advanced simulator, modeling reward functions based on realistic physical phenomena and executing the tasks with realistic robot dynamics. Results establish efficacy in modeling complex missions and efficiency in generating high-fidelity task plans while leveraging task relationships.
Real-time Two-tape Control System in Vine robots
May 02, 2025This paper focuses on how to make a growing Vine robot steer in different directions with a novel approach to real-time steering control by autonomously applying adhesive tape to induce a surface wrinkles. This enabling real-time directional control with arbitrary many turns while maintaining the robot's soft structure. This system feeds growing material external to the tube. The design achieves fixed-angle turns in 2D space. Through experimental validation, we demonstrate repeated 21-degree turns using a Dubins path planner with minimal error, establishing a foundation for more versatile Vine robot applications. This approach combines real-time control, multi-degree-of-freedom steering, and structural flexibility, addressing key challenges in soft robotics.
Active Learning Design: Modeling Force Output for Axisymmetric Soft Pneumatic Actuators
Apr 01, 2025Soft pneumatic actuators (SPA) made from elastomeric materials can provide large strain and large force. The behavior of locally strain-restricted hyperelastic materials under inflation has been investigated thoroughly for shape reconfiguration, but requires further investigation for trajectories involving external force. In this work we model force-pressure-height relationships for a concentrically strain-limited class of soft pneumatic actuators and demonstrate the use of this model to design SPA response for object lifting. We predict relationships under different loadings by solving energy minimization equations and verify this theory by using an automated test rig to collect rich data for n=22 Ecoflex 00-30 membranes. We collect this data using an active learning pipeline to efficiently model the design space. We show that this learned material model outperforms the theory-based model and naive curve-fitting approaches. We use our model to optimize membrane design for different lift tasks and compare this performance to other designs. These contributions represent a step towards understanding the natural response for this class of actuator and embodying intelligent lifts in a single-pressure input actuator system.
Microscopic Robots That Sense, Think, Act, and Compute
Mar 29, 2025While miniaturization has been a goal in robotics for nearly 40 years, roboticists have struggled to access sub-millimeter dimensions without making sacrifices to on-board information processing due to the unique physics of the microscale. Consequently, microrobots often lack the key features that distinguish their macroscopic cousins from other machines, namely on-robot systems for decision making, sensing, feedback, and programmable computation. Here, we take up the challenge of building a microrobot comparable in size to a single-celled paramecium that can sense, think, and act using onboard systems for computation, sensing, memory, locomotion, and communication. Built massively in parallel with fully lithographic processing, these microrobots can execute digitally defined algorithms and autonomously change behavior in response to their surroundings. Combined, these results pave the way for general purpose microrobots that can be programmed many times in a simple setup, cost under $0.01 per machine, and work together to carry out tasks without supervision in uncertain environments.
Learning In-Hand Translation Using Tactile Skin With Shear and Normal Force Sensing
Jul 10, 2024Recent progress in reinforcement learning (RL) and tactile sensing has significantly advanced dexterous manipulation. However, these methods often utilize simplified tactile signals due to the gap between tactile simulation and the real world. We introduce a sensor model for tactile skin that enables zero-shot sim-to-real transfer of ternary shear and binary normal forces. Using this model, we develop an RL policy that leverages sliding contact for dexterous in-hand translation. We conduct extensive real-world experiments to assess how tactile sensing facilitates policy adaptation to various unseen object properties and robot hand orientations. We demonstrate that our 3-axis tactile policies consistently outperform baselines that use only shear forces, only normal forces, or only proprioception. Website: https://jessicayin.github.io/tactile-skin-rl/
A Single Motor Nano Aerial Vehicle with Novel Peer-to-Peer Communication and Sensing Mechanism
May 23, 2024Communication and position sensing are among the most important capabilities for swarm robots to interact with their peers and perform tasks collaboratively. However, the hardware required to facilitate communication and position sensing is often too complicated, expensive, and bulky to be carried on swarm robots. Here we present Maneuverable Piccolissimo 3 (MP3), a minimalist, single motor drone capable of executing inter-robot communication via infrared light and triangulation-based sensing of relative bearing, distance, and elevation using message arrival time. Thanks to its novel design, MP3 can communicate with peers and localize itself using simple components, keeping its size and mass small and making it inherently safe for human interaction. Here we present the hardware and software design of MP3 and demonstrate its capability to localize itself, fly stably and maneuver in the environment using peer-to-peer communication and sensing.
Continuous Sculpting: Persistent Swarm Shape Formation Adaptable to Local Environmental Changes
Apr 02, 2024Despite their growing popularity, swarms of robots remain limited by the operating time of each individual. We present algorithms which allow a human to sculpt a swarm of robots into a shape that persists in space perpetually, independent of onboard energy constraints such as batteries. Robots generate a path through a shape such that robots cycle in and out of the shape. Robots inside the shape react to human initiated changes and adapt the path through the shape accordingly. Robots outside the shape recharge and return to the shape so that the shape can persist indefinitely. The presented algorithms communicate shape changes throughout the swarm using message passing and robot motion. These algorithms enable the swarm to persist through any arbitrary changes to the shape. We describe these algorithms in detail and present their performance in simulation and on a swarm of mobile robots. The result is a swarm behavior more suitable for extended duration, dynamic shape-based tasks in applications such as agriculture and emergency response.
Holonomic Control of Arbitrary Configurations of Docked Modboats
Nov 29, 2022The Modboat is a low-cost, underactuated, modular robot capable of surface swimming, docking to other modules, and undocking from them using only a single motor and two passive flippers. Undocking is achieved by causing intentional self-collision between the tails of neighboring modules in certain configurations; this becomes a challenge, however, when collective swimming as one connected component is desirable. Prior work has developed controllers that turn arbitrary configurations of docked Modboats into steerable vehicles, but they cannot counteract lateral forces and disturbances. In this work we present a centralized control strategy to create holonomic vehicles out of arbitrary configurations of docked Modboats using an iterative potential-field based search. We experimentally demonstrate that our controller performs well and can control surge and sway velocities and yaw angle simultaneously.
Electroadhesive Clutches for Programmable Shape Morphing of Soft Actuators
Nov 14, 2022



Soft robotic actuators are safe and adaptable devices with inherent compliance, which makes them attractive for manipulating delicate and complex objects. Researchers have integrated stiff materials into soft actuators to increase their force capacity and direct their deformation. However, these embedded materials have largely been pre-prescribed and static, which constrains the actuators to a predetermined range of motion. In this work, electroadhesive (EA) clutches integrated on a single-chamber soft pneumatic actuator (SPA) provide local programmable stiffness modulation to control the actuator deformation. We show that activating different clutch patterns inflates a silicone membrane into pyramidal, round, and plateau shapes. Curvatures from these shapes are combined during actuation to apply forces on both a 3.7 g and 820 g object along five different degrees of freedom (DoF). The actuator workspace is up to 12 mm for light objects. Clutch deactivation, which results in local elastomeric expansion, rapidly applies forces up to 3.2 N to an object resting on the surface and launches a 3.7 g object in controlled directions. The actuator also rotates a heavier, 820 g, object by 5 degrees and rapidly restores it to horizontal alignment after clutch deactivation. This actuator is fully powered by a 5 V battery, AA battery, DC-DC transformer, and 4.5 V (63 g) DC air pump. These results demonstrate a first step towards realizing a soft actuator with high DoF shape change that preserves the inherent benefits of pneumatic actuation while gaining the electrical controllability and strength of EA clutches. We envision such a system supplying human contact forces in the form of a low-profile sit-to-stand assistance device, bed-ridden patient manipulator, or other ergonomic mechanism. This technology was also demonstrated at ICRA 2022: https://www.youtube.com/watch?v=6Y6-iHWNi6s
Collective Control for Arbitrary Configurations of Docked Modboats
Sep 08, 2022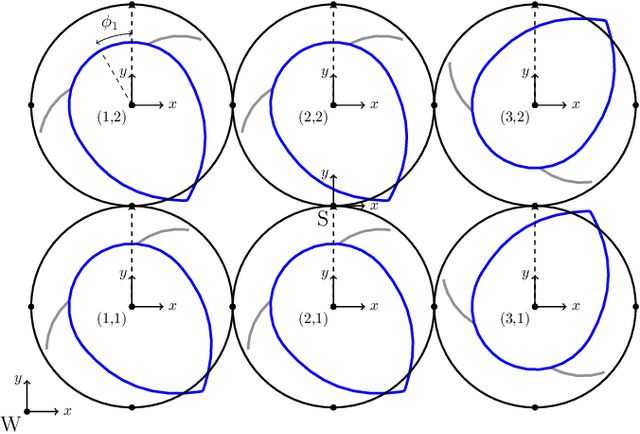
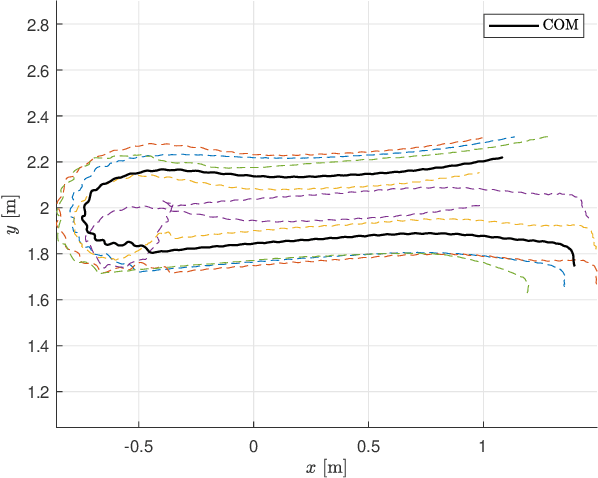
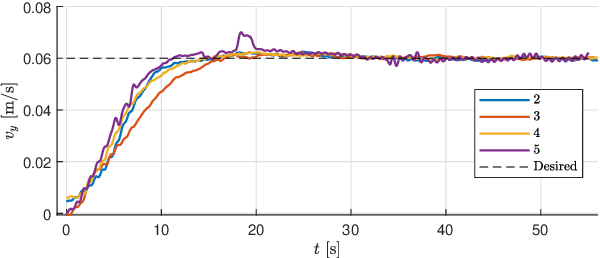
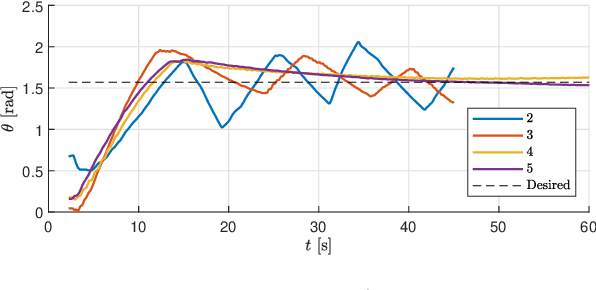
The Modboat is a low-cost, underactuated, modular robot capable of surface swimming, docking to other modules, and undocking from them using only a single motor and two passive flippers. Undocking is achieved by causing intentional self-collision between the tails of neighboring modules in certain configurations; this becomes a challenge, however, when collective swimming as one connected component is desirable. In this work, we develop a centralized control strategy to allow \textit{arbitrary} configurations of Modboats to swim as a single steerable vehicle and guarantee no accidental undocking. We also present a simplified model for hydrodynamic interactions between boats in a configuration that is tractable for real-time control. We experimentally demonstrate that our controller performs well, is consistent for configurations of various sizes and shapes, and can control both surge velocity and yaw angle simultaneously. Controllability is maintained while swimming, but pure yaw control causes lateral movement that cannot be counteracted by the presented framework.