 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMmBack: Clock-free Multi-Sensor Backscatter with Synchronous Acquisition and Multiplexing
Jul 02, 2025Backscatter tags provide a low-power solution for sensor applications, yet many real-world scenarios require multiple sensors-often of different types-for complex sensing tasks. However, existing designs support only a single sensor per tag, increasing spatial overhead. State-of-the-art approaches to multiplexing multiple sensor streams on a single tag rely on onboard clocks or multiple modulation chains, which add cost, enlarge form factor, and remain prone to timing drift-disrupting synchronization across sensors. We present mmBack, a low-power, clock-free backscatter tag that enables synchronous multi-sensor data acquisition and multiplexing over a single modulation chain. mmBack synchronizes sensor inputs in parallel using a shared reference signal extracted from ambient RF excitation, eliminating the need for an onboard timing source. To efficiently multiplex sensor data, mmBack designs a voltage-division scheme to multiplex multiple sensor inputs as backscatter frequency shifts through a single oscillator and RF switch. At the receiver, mmBack develops a frequency tracking algorithm and a finite-state machine for accurate demultiplexing. mmBack's ASIC design consumes 25.56uW, while its prototype supports 5 concurrent sensor streams with bandwidths of up to 5kHz and 3 concurrent sensor streams with bandwidth of up to 18kHz. Evaluation shows that mmBack achieves an average SNR surpassing 15dB in signal reconstruction.
Reconfigurable legged metamachines that run on autonomous modular legs
May 01, 2025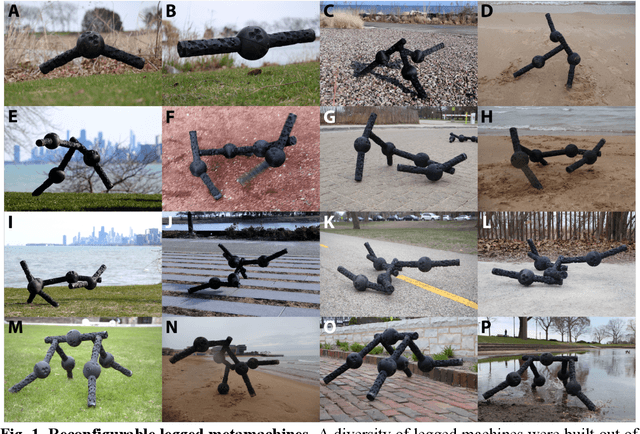
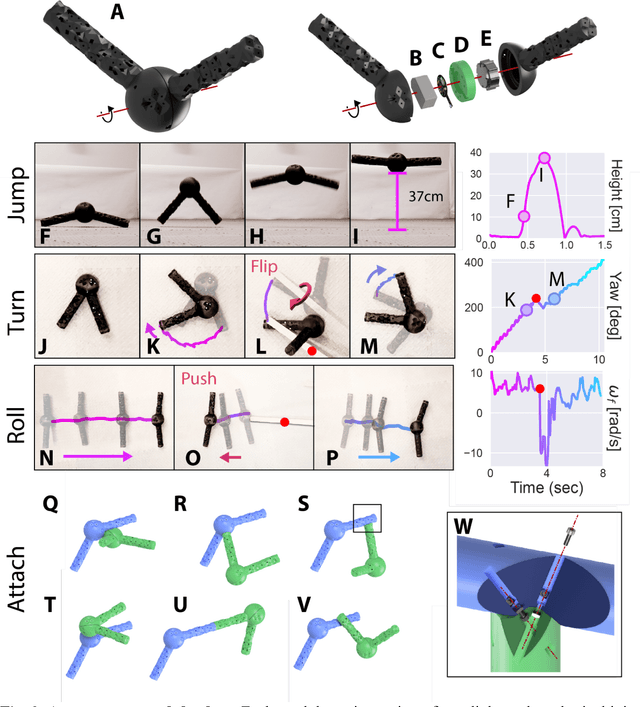
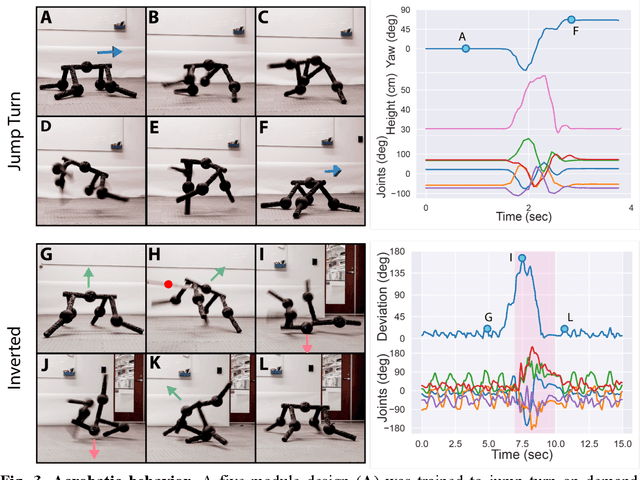
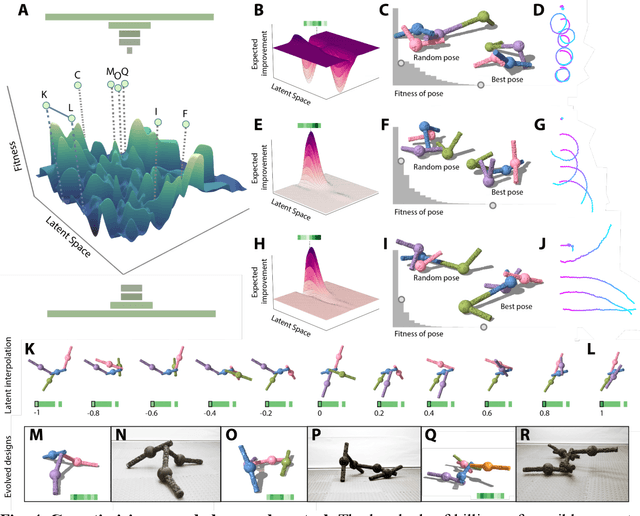
Legged machines are becoming increasingly agile and adaptive but they have so far lacked the basic reconfigurability of legged animals, which have been rearranged and reshaped to fill millions of niches. Unlike their biological counterparts, legged machines have largely converged over the past decade to canonical quadrupedal and bipedal architectures that cannot be easily reconfigured to meet new tasks or recover from injury. Here we introduce autonomous modular legs: agile yet minimal, single-degree-of-freedom jointed links that can learn complex dynamic behaviors and may be freely attached to form legged metamachines at the meter scale. This enables rapid repair, redesign, and recombination of highly-dynamic modular agents that move quickly and acrobatically (non-quasistatically) through unstructured environments. Because each module is itself a complete agent, legged metamachines are able to sustain deep structural damage that would completely disable other legged robots. We also show how to encode the vast space of possible body configurations into a compact latent design genome that can be efficiently explored, revealing a wide diversity of novel legged forms.
An Empirical Study of the Impact of Federated Learning on Machine Learning Model Accuracy
Mar 27, 2025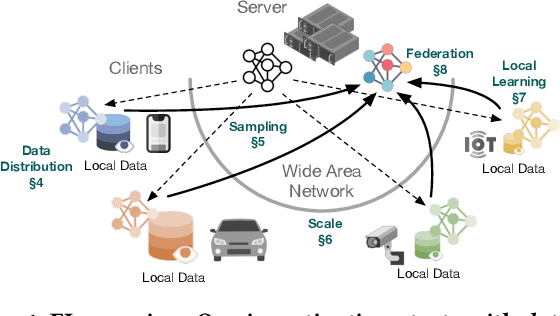
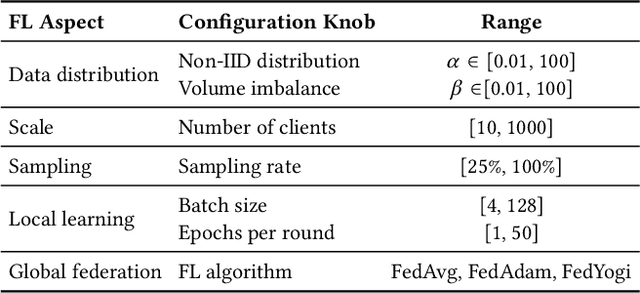

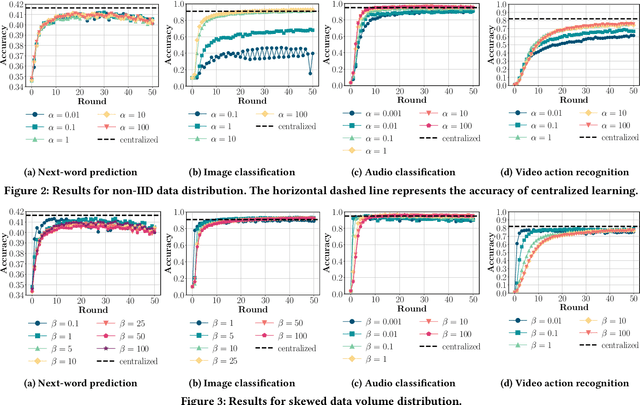
Federated Learning (FL) enables distributed ML model training on private user data at the global scale. Despite the potential of FL demonstrated in many domains, an in-depth view of its impact on model accuracy remains unclear. In this paper, we investigate, systematically, how this learning paradigm can affect the accuracy of state-of-the-art ML models for a variety of ML tasks. We present an empirical study that involves various data types: text, image, audio, and video, and FL configuration knobs: data distribution, FL scale, client sampling, and local and global computations. Our experiments are conducted in a unified FL framework to achieve high fidelity, with substantial human efforts and resource investments. Based on the results, we perform a quantitative analysis of the impact of FL, and highlight challenging scenarios where applying FL degrades the accuracy of the model drastically and identify cases where the impact is negligible. The detailed and extensive findings can benefit practical deployments and future development of FL.
High-Resolution Range-Doppler Imaging from One-Bit PMCW Radar via Generative Adversarial Networks
Mar 17, 2025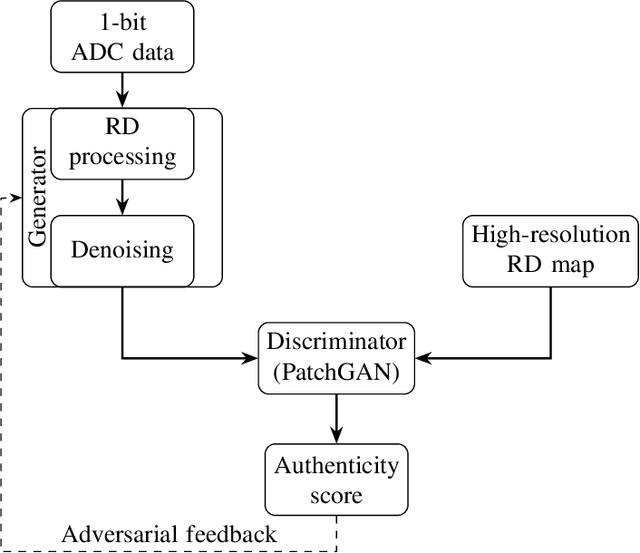

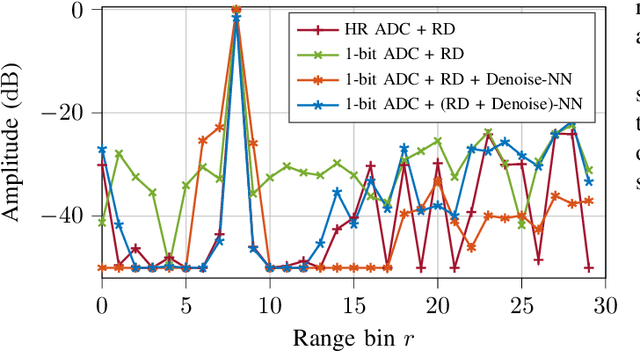
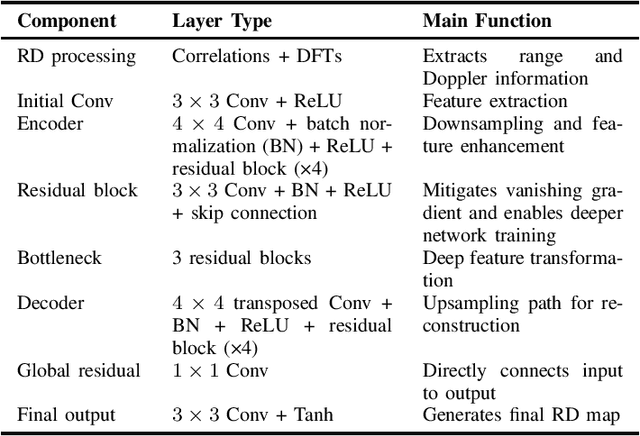
Digital modulation schemes such as PMCW have recently attracted increasing attention as possible replacements for FMCW modulation in future automotive radar systems. A significant obstacle to their widespread adoption is the expensive and power-consuming ADC required at gigahertz frequencies. To mitigate these challenges, employing low-resolution ADC, such as one-bit, has been suggested. Nonetheless, using one-bit sampling results in the loss of essential information. This study explores two RD imaging methods in PMCW radar systems utilizing NN. The first method merges standard RD signal processing with a GAN, whereas the second method uses an E2E strategy in which traditional signal processing is substituted with an NN-based RD module. The findings indicate that these methods can substantially improve the probability of detecting targets in the range-Doppler domain.
A Single Motor Nano Aerial Vehicle with Novel Peer-to-Peer Communication and Sensing Mechanism
May 23, 2024Communication and position sensing are among the most important capabilities for swarm robots to interact with their peers and perform tasks collaboratively. However, the hardware required to facilitate communication and position sensing is often too complicated, expensive, and bulky to be carried on swarm robots. Here we present Maneuverable Piccolissimo 3 (MP3), a minimalist, single motor drone capable of executing inter-robot communication via infrared light and triangulation-based sensing of relative bearing, distance, and elevation using message arrival time. Thanks to its novel design, MP3 can communicate with peers and localize itself using simple components, keeping its size and mass small and making it inherently safe for human interaction. Here we present the hardware and software design of MP3 and demonstrate its capability to localize itself, fly stably and maneuver in the environment using peer-to-peer communication and sensing.
Rollbot: a Spherical Robot Driven by a Single Actuator
Apr 08, 2024



Here we present Rollbot, the first spherical robot capable of controllably maneuvering on 2D plane with a single actuator. Rollbot rolls on the ground in circular pattern and controls its motion by changing the curvature of the trajectory through accelerating and decelerating its single motor and attached mass. We present the theoretical analysis, design, and control of Rollbot, and demonstrate its ability to move in a controllable circular pattern and follow waypoints.
PCBot: a Minimalist Robot Designed for Swarm Applications
Apr 07, 2024



Complexity, cost, and power requirements for the actuation of individual robots can play a large factor in limiting the size of robotic swarms. Here we present PCBot, a minimalist robot that can precisely move on an orbital shake table using a bi-stable solenoid actuator built directly into its PCB. This allows the actuator to be built as part of the automated PCB manufacturing process, greatly reducing the impact it has on manual assembly. Thanks to this novel actuator design, PCBot has merely five major components and can be assembled in under 20 seconds, potentially enabling them to be easily mass-manufactured. Here we present the electro-magnetic and mechanical design of PCBot. Additionally, a prototype robot is used to demonstrate its ability to move in a straight line as well as follow given paths.
Distributed Localization without Direct Communication Inspired by Statistical Mechanics
Jun 04, 2020



Distributed localization is essential in many robotic collective tasks such as shape formation and self-assembly.Inspired by the statistical mechanics of energy transition, this paper presents a fully distributed localization algorithm named as virtual particle exchange (VPE) localization algorithm, where each robot repetitively exchanges virtual particles (VPs) with neighbors and eventually obtains its relative position from the virtual particle (VP) amount it owns. Using custom-designed hardware and protocol, VPE localization algorithm allows robots to achieve localization using sensor readings only, avoiding direct communication with neighbors and keeping anonymity. Moreover, VPE localization algorithm determines the swarm center automatically, thereby eliminating the requirement of fixed beacons to embody the origin of coordinates. Theoretical analysis proves that the VPE localization algorithm can always converge to the same result regardless of initial state and has low asymptotic time and memory complexity. Extensive localization simulations with up to 10000 robots and experiments with 52 lowcost robots are carried out, which verify that VPE localization algorithm is scalable, accurate and robust to sensor noises. Based on the VPE localization algorithm, shape formations are further achieved in both simulations and experiments with 52 robots, illustrating that the algorithm can be directly applied to support swarm collaborative tasks.