 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeECo-MoE: Embodiment-Conditioned Mixture of Experts Increases the Evolvability of Robots
May 22, 2026In this paper, we introduce a model of evolution and learning in robots that co-optimizes a distribution of latent design vectors (genotypes) and a mixture of control experts (neural modules), which are gated by the latent coordinates of each decoded design (phenotype). This provides a scalable alternative to co-design algorithms that either train an individual policy for every robot, which is inefficient, or a monolithic universal controller for all robots, which results in overly conservative structures and behaviors. Our approach lies somewhere between these two extremes, preserving ancestral knowledge in a unified yet modular framework in which different body plans activate and deactivate different combinations of learned sensorimotor circuits for goal-directed behavior. This allows one part of the controller to be overhauled to better suit new species of designs as they emerge without disrupting the hard-earned knowledge contained within other expert modules. It also allows pretrained expert policies to be directly plugged into the mixture, which can steer evolution into otherwise unexplored areas of latent space containing desired morphological traits. We refer to this process as "evo by demo" and explore how it may be used to guide freeform evolution toward canonical structures defined by the pretrained model. Videos and code can be found at: https://eco-moe.github.io.
Creating manufacturable blueprints for coarse-grained virtual robots
Mar 13, 2026Over the past three decades, countless embodied yet virtual agents have freely evolved inside computer simulations, but vanishingly few were realized as physical robots. This is because evolution was conducted at a level of abstraction that was convenient for freeform body generation (creation, mutation, recombination) but swept away almost all of the physical details of functional body parts. The resulting designs were crude and underdetermined, requiring considerable effort and expertise to convert into a manufacturable format. Here, we automate this mapping from simplified design spaces that are readily evolvable to complete blueprints that can be directly followed by a builder. The pipeline incrementally resolves manufacturing constraints by embedding the structural and functional semantics of motors, electronics, batteries, and wiring into the abstract virtual design. In lieu of evolution, a user-defined or AI-generated ``sketch'' of a body plan can also be fed as input to the pipeline, providing a versatile framework for accelerating the design of novel robots.
Robots that redesign themselves through kinematic self-destruction
Mar 12, 2026Every robot built to date was predesigned by an external process, prior to deployment. Here we show a robot that actively participates in its own design during its lifetime. Starting from a randomly assembled body, and using only proprioceptive feedback, the robot dynamically ``sculpts'' itself into a new design through kinematic self-destruction: identifying redundant links within its body that inhibit its locomotion, and then thrashing those links against the surface until they break at the joint and fall off the body. It does so using a single autoregressive sequence model, a universal controller that learns in simulation when and how to simplify a robot's body through self-destruction and then adaptively controls the reduced morphology. The optimized policy successfully transfers to reality and generalizes to previously unseen kinematic trees, generating forward locomotion that is more effective than otherwise equivalent policies that randomly remove links or cannot remove any. This suggests that self-designing robots may be more successful than predesigned robots in some cases, and that kinematic self-destruction, though reductive and irreversible, could provide a general adaptive strategy for a wide range of robots.
Reconfigurable legged metamachines that run on autonomous modular legs
May 01, 2025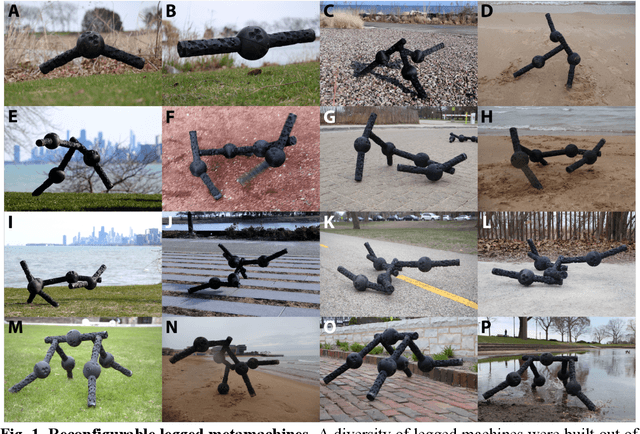
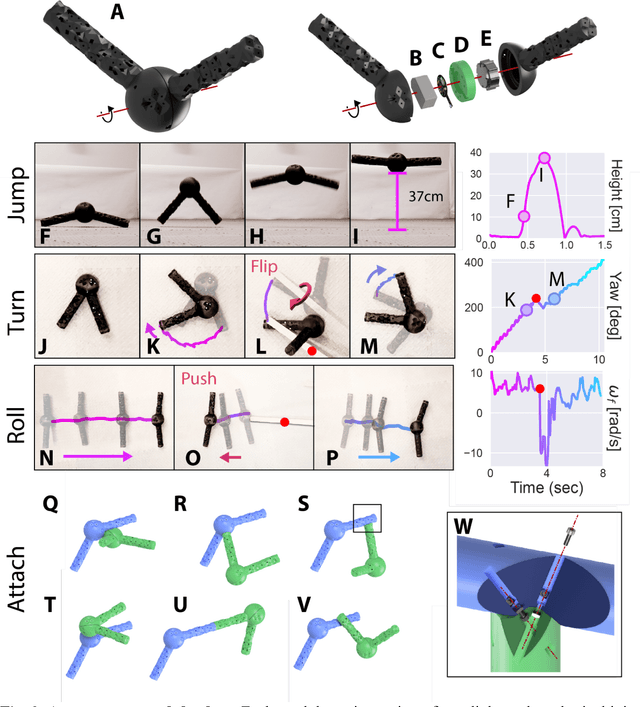
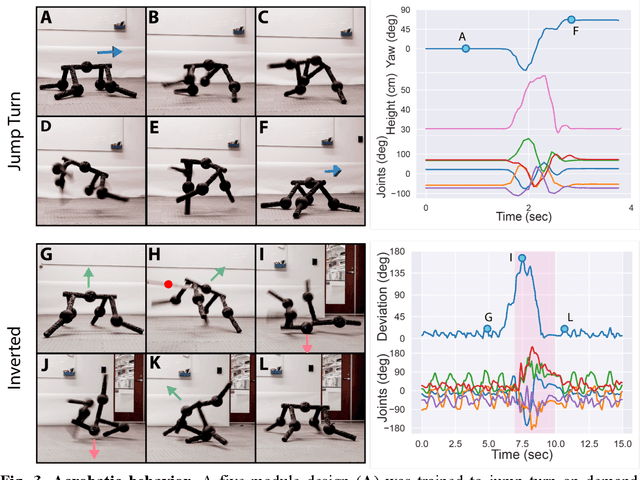
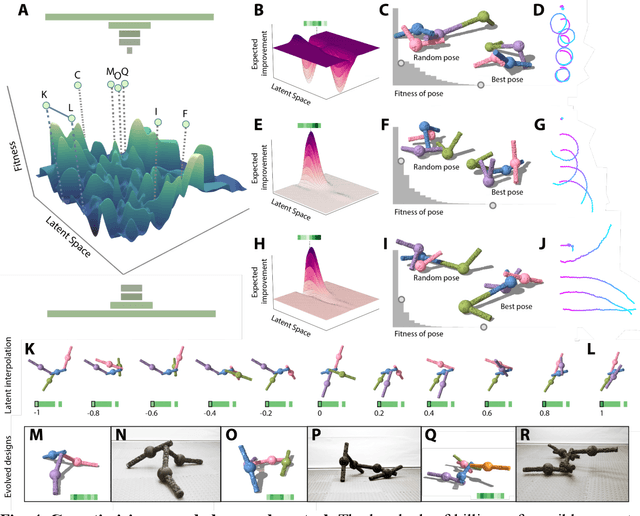
Legged machines are becoming increasingly agile and adaptive but they have so far lacked the basic reconfigurability of legged animals, which have been rearranged and reshaped to fill millions of niches. Unlike their biological counterparts, legged machines have largely converged over the past decade to canonical quadrupedal and bipedal architectures that cannot be easily reconfigured to meet new tasks or recover from injury. Here we introduce autonomous modular legs: agile yet minimal, single-degree-of-freedom jointed links that can learn complex dynamic behaviors and may be freely attached to form legged metamachines at the meter scale. This enables rapid repair, redesign, and recombination of highly-dynamic modular agents that move quickly and acrobatically (non-quasistatically) through unstructured environments. Because each module is itself a complete agent, legged metamachines are able to sustain deep structural damage that would completely disable other legged robots. We also show how to encode the vast space of possible body configurations into a compact latent design genome that can be efficiently explored, revealing a wide diversity of novel legged forms.
Generating Freeform Endoskeletal Robots
Dec 02, 2024



The automatic design of embodied agents (e.g. robots) has existed for 31 years and is experiencing a renaissance of interest in the literature. To date however, the field has remained narrowly focused on two kinds of anatomically simple robots: (1) fully rigid, jointed bodies; and (2) fully soft, jointless bodies. Here we bridge these two extremes with the open ended creation of terrestrial endoskeletal robots: deformable soft bodies that leverage jointed internal skeletons to move efficiently across land. Simultaneous de novo generation of external and internal structures is achieved by (i) modeling 3D endoskeletal body plans as integrated collections of elastic and rigid cells that directly attach to form soft tissues anchored to compound rigid bodies; (ii) encoding these discrete mechanical subsystems into a continuous yet coherent latent embedding; (iii) optimizing the sensorimotor coordination of each decoded design using model-free reinforcement learning; and (iv) navigating this smooth yet highly non-convex latent manifold using evolutionary strategies. This yields an endless stream of novel species of "higher robots" that, like all higher animals, harness the mechanical advantages of both elastic tissues and skeletal levers for terrestrial travel. It also provides a plug-and-play experimental platform for benchmarking evolutionary design and representation learning algorithms in complex hierarchical embodied systems.
Evolution and learning in differentiable robots
May 23, 2024The automatic design of robots has existed for 30 years but has been constricted by serial non-differentiable design evaluations, premature convergence to simple bodies or clumsy behaviors, and a lack of sim2real transfer to physical machines. Thus, here we employ massively-parallel differentiable simulations to rapidly and simultaneously optimize individual neural control of behavior across a large population of candidate body plans and return a fitness score for each design based on the performance of its fully optimized behavior. Non-differentiable changes to the mechanical structure of each robot in the population -- mutations that rearrange, combine, add, or remove body parts -- were applied by a genetic algorithm in an outer loop of search, generating a continuous flow of novel morphologies with highly-coordinated and graceful behaviors honed by gradient descent. This enabled the exploration of several orders-of-magnitude more designs than all previous methods, despite the fact that robots here have the potential to be much more complex, in terms of number of independent motors, than those in prior studies. We found that evolution reliably produces ``increasingly differentiable'' robots: body plans that smooth the loss landscape in which learning operates and thereby provide better training paths toward performant behaviors. Finally, one of the highly differentiable morphologies discovered in simulation was realized as a physical robot and shown to retain its optimized behavior. This provides a cyberphysical platform to investigate the relationship between evolution and learning in biological systems and broadens our understanding of how a robot's physical structure can influence the ability to train policies for it. Videos and code at https://sites.google.com/view/eldir.
A non-cubic space-filling modular robot
Mar 02, 2024Space-filling building blocks of diverse shape permeate nature at all levels of organization, from atoms to honeycombs, and have proven useful in artificial systems, from molecular containers to clay bricks. But, despite the wide variety of space-filling polyhedra known to mathematics, only the cube has been explored in robotics. Thus, here we roboticize a non-cubic space-filling shape: the rhombic dodecahedron. This geometry offers an appealing alternative to cubes as it greatly simplifies rotational motion of one cell about the edge of another, and increases the number of neighbors each cell can communicate with and hold on to. To better understand the challenges and opportunities of these and other space-filling machines, we manufactured 48 rhombic dodecahedral cells and used them to build various superstructures. We report locomotive ability of some of the structures we built, and discuss the dis/advantages of the different designs we tested. We also introduce a strategy for genderless passive docking of cells that generalizes to any polyhedra with radially symmetrical faces. Future work will allow the cells to freely roll/rotate about one another so that they may realize the full potential of their unique shape.
Reinforcement learning for freeform robot design
Oct 09, 2023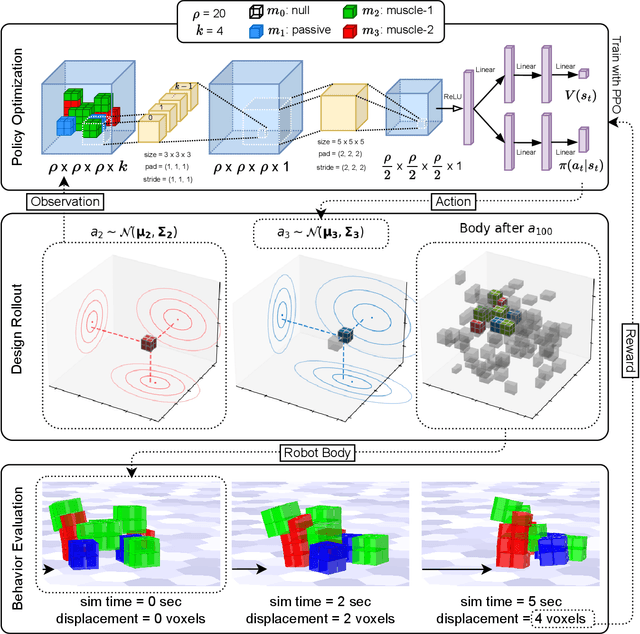
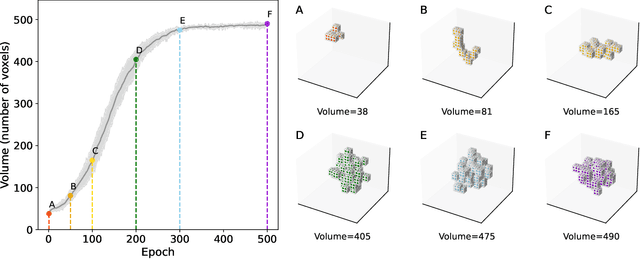
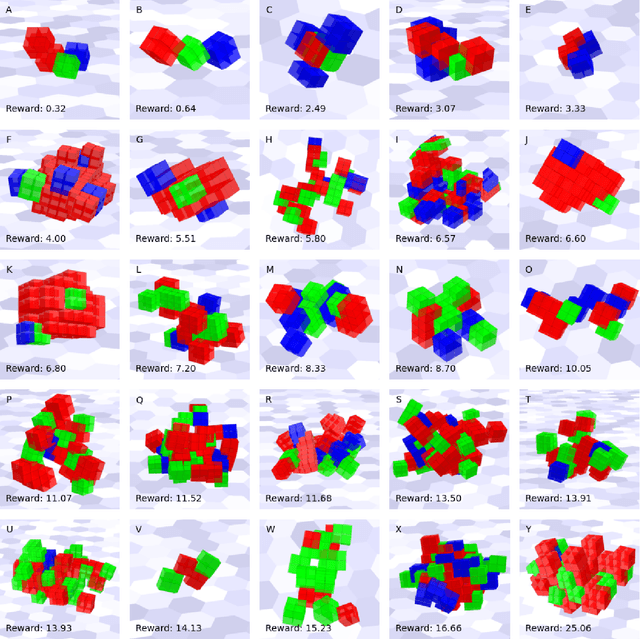
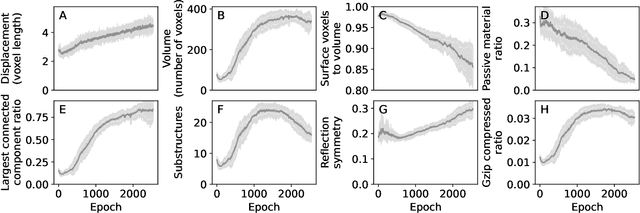
Inspired by the necessity of morphological adaptation in animals, a growing body of work has attempted to expand robot training to encompass physical aspects of a robot's design. However, reinforcement learning methods capable of optimizing the 3D morphology of a robot have been restricted to reorienting or resizing the limbs of a predetermined and static topological genus. Here we show policy gradients for designing freeform robots with arbitrary external and internal structure. This is achieved through actions that deposit or remove bundles of atomic building blocks to form higher-level nonparametric macrostructures such as appendages, organs and cavities. Although results are provided for open loop control only, we discuss how this method could be adapted for closed loop control and sim2real transfer to physical machines in future.
Glamour muscles: why having a body is not what it means to be embodied
Jul 17, 2023
Embodiment has recently enjoyed renewed consideration as a means to amplify the faculties of smart machines. Proponents of embodiment seem to imply that optimizing for movement in physical space promotes something more than the acquisition of niche capabilities for solving problems in physical space. However, there is nothing in principle which should so distinguish the problem of action selection in physical space from the problem of action selection in more abstract spaces, like that of language. Rather, what makes embodiment persuasive as a means toward higher intelligence is that it promises to capture, but does not actually realize, contingent facts about certain bodies (living intelligence) and the patterns of activity associated with them. These include an active resistance to annihilation and revisable constraints on the processes that make the world intelligible. To be theoretically or practically useful beyond the creation of niche tools, we argue that "embodiment" cannot be the trivial fact of a body, nor its movement through space, but the perpetual negotiation of the function, design, and integrity of that body$\unicode{x2013}$that is, to participate in what it means to $\textit{constitute}$ a given body. It follows that computer programs which are strictly incapable of traversing physical space might, under the right conditions, be more embodied than a walking, talking robot.
Efficient automatic design of robots
Jun 05, 2023Robots are notoriously difficult to design because of complex interdependencies between their physical structure, sensory and motor layouts, and behavior. Despite this, almost every detail of every robot built to date has been manually determined by a human designer after several months or years of iterative ideation, prototyping, and testing. Inspired by evolutionary design in nature, the automated design of robots using evolutionary algorithms has been attempted for two decades, but it too remains inefficient: days of supercomputing are required to design robots in simulation that, when manufactured, exhibit desired behavior. Here we show for the first time de-novo optimization of a robot's structure to exhibit a desired behavior, within seconds on a single consumer-grade computer, and the manufactured robot's retention of that behavior. Unlike other gradient-based robot design methods, this algorithm does not presuppose any particular anatomical form; starting instead from a randomly-generated apodous body plan, it consistently discovers legged locomotion, the most efficient known form of terrestrial movement. If combined with automated fabrication and scaled up to more challenging tasks, this advance promises near instantaneous design, manufacture, and deployment of unique and useful machines for medical, environmental, vehicular, and space-based tasks.