 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconfigurable legged metamachines that run on autonomous modular legs
May 01, 2025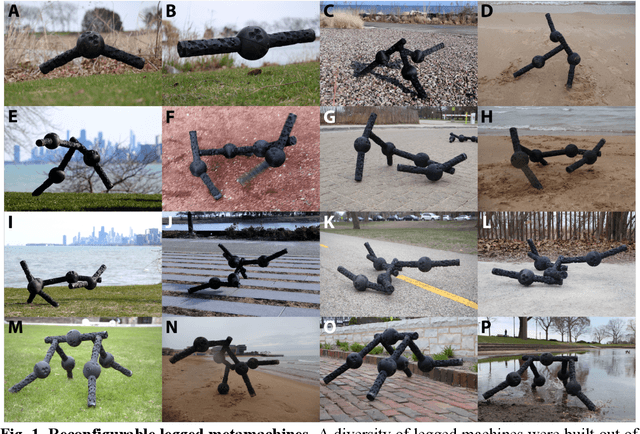
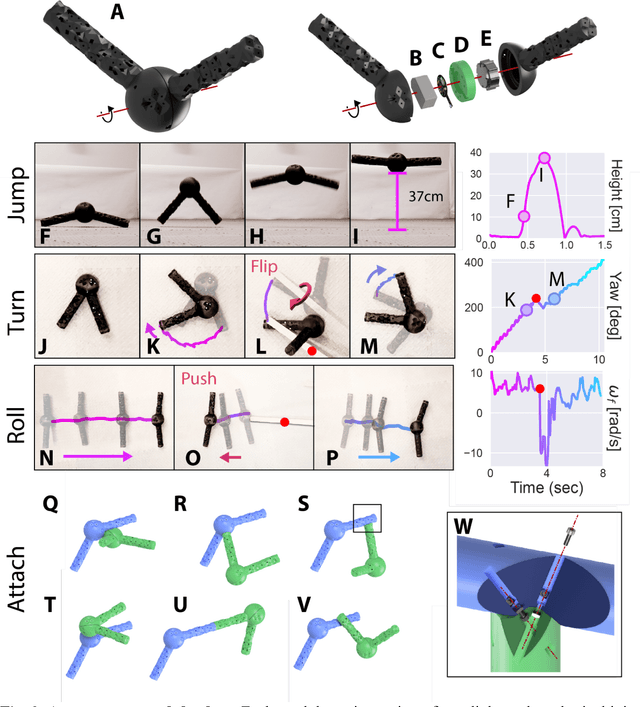
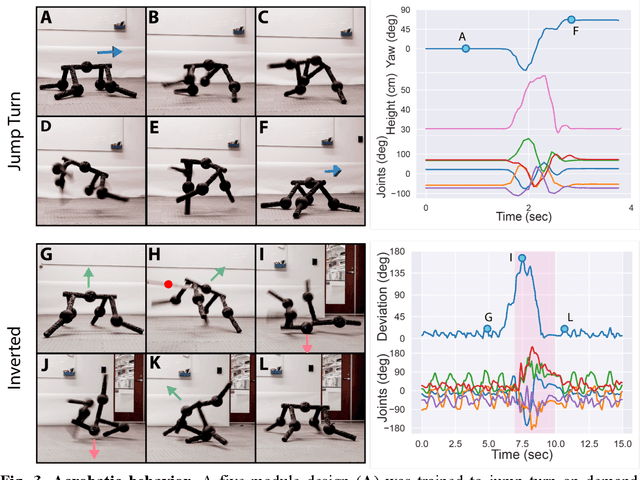
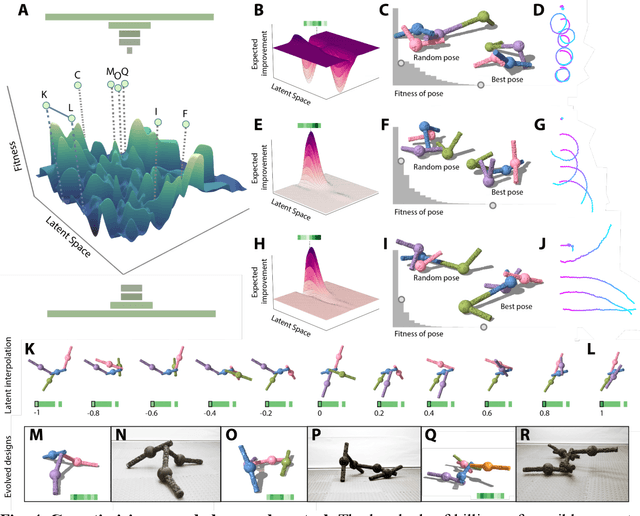
Legged machines are becoming increasingly agile and adaptive but they have so far lacked the basic reconfigurability of legged animals, which have been rearranged and reshaped to fill millions of niches. Unlike their biological counterparts, legged machines have largely converged over the past decade to canonical quadrupedal and bipedal architectures that cannot be easily reconfigured to meet new tasks or recover from injury. Here we introduce autonomous modular legs: agile yet minimal, single-degree-of-freedom jointed links that can learn complex dynamic behaviors and may be freely attached to form legged metamachines at the meter scale. This enables rapid repair, redesign, and recombination of highly-dynamic modular agents that move quickly and acrobatically (non-quasistatically) through unstructured environments. Because each module is itself a complete agent, legged metamachines are able to sustain deep structural damage that would completely disable other legged robots. We also show how to encode the vast space of possible body configurations into a compact latent design genome that can be efficiently explored, revealing a wide diversity of novel legged forms.
Scale invariant robot behavior with fractals
Mar 08, 2021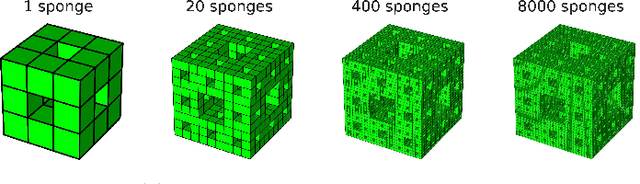
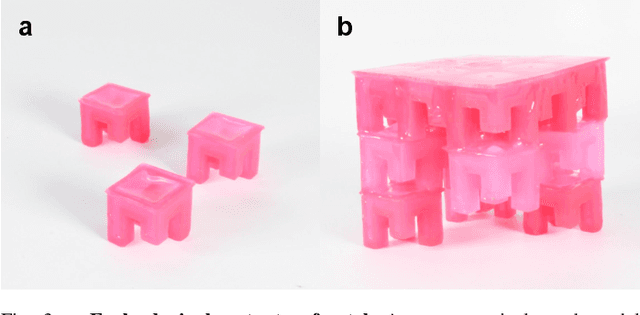
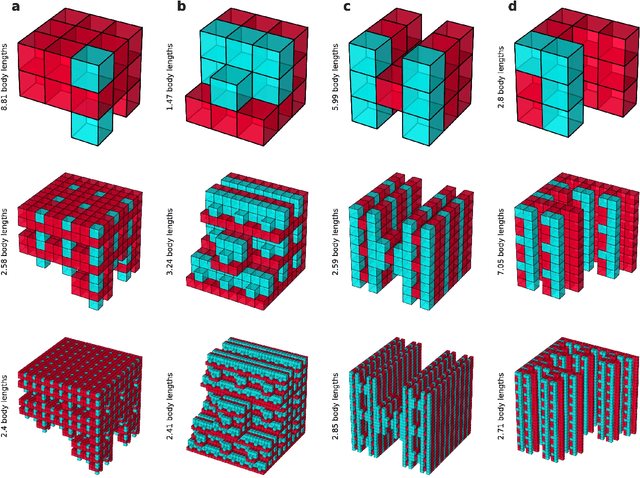
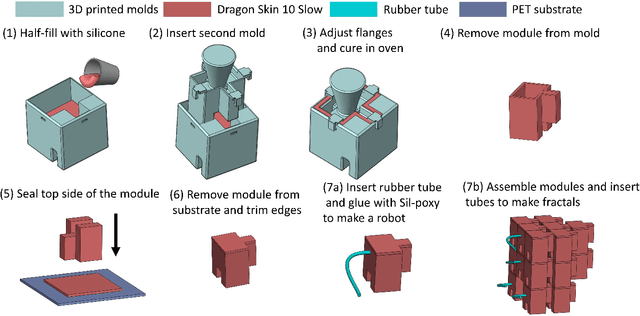
Robots deployed at orders of magnitude different size scales, and that retain the same desired behavior at any of those scales, would greatly expand the environments in which the robots could operate. However it is currently not known whether such robots exist, and, if they do, how to design them. Since self similar structures in nature often exhibit self similar behavior at different scales, we hypothesize that there may exist robot designs that have the same property. Here we demonstrate that this is indeed the case for some, but not all, modular soft robots: there are robot designs that exhibit a desired behavior at a small size scale, and if copies of that robot are attached together to realize the same design at higher scales, those larger robots exhibit similar behavior. We show how to find such designs in simulation using an evolutionary algorithm. Further, when fractal attachment is not assumed and attachment geometries must thus be evolved along with the design of the base robot unit, scale invariant behavior is not achieved, demonstrating that structural self similarity, when combined with appropriate designs, is a useful path to realizing scale invariant robot behavior. We validate our findings by demonstrating successful transferal of self similar structure and behavior to pneumatically-controlled soft robots. Finally, we show that biobots can spontaneously exhibit self similar attachment geometries, thereby suggesting that self similar behavior via self similar structure may be realizable across a wide range of robot platforms in future.