 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconfigurable legged metamachines that run on autonomous modular legs
May 01, 2025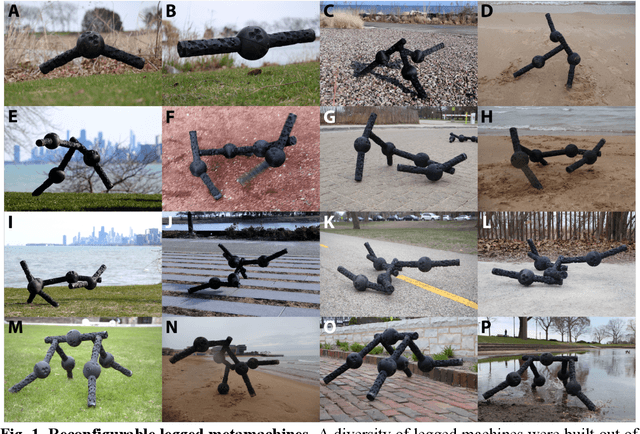
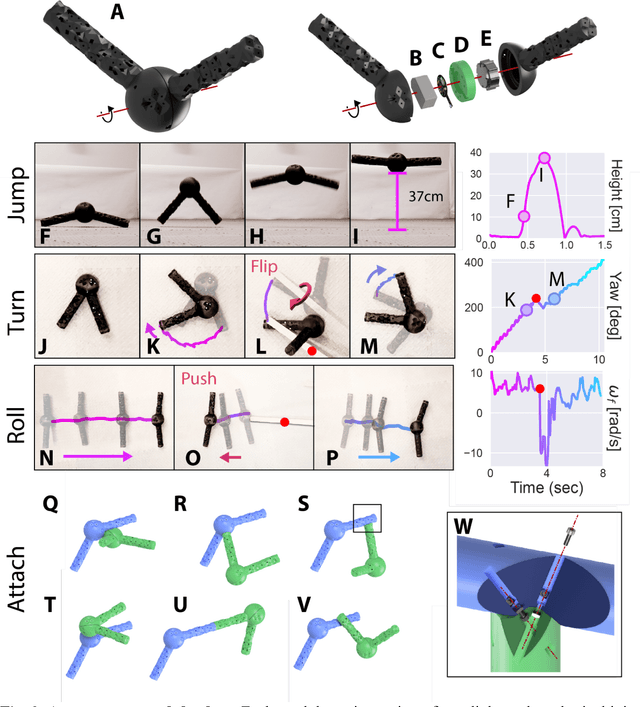
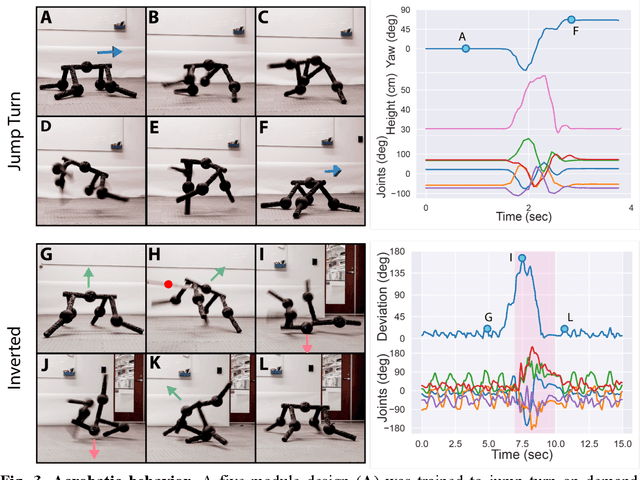
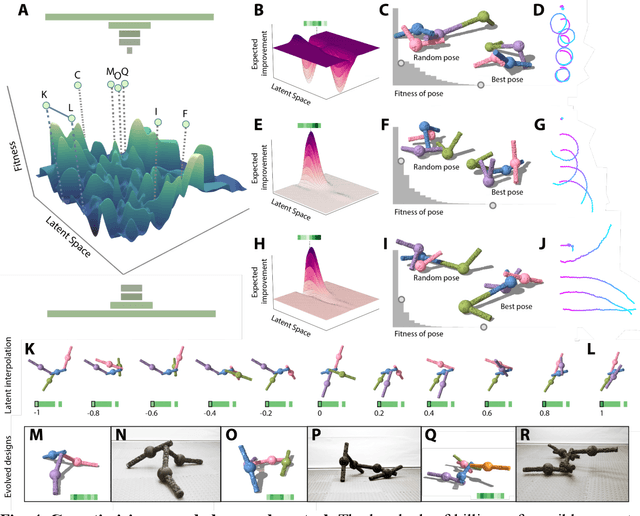
Legged machines are becoming increasingly agile and adaptive but they have so far lacked the basic reconfigurability of legged animals, which have been rearranged and reshaped to fill millions of niches. Unlike their biological counterparts, legged machines have largely converged over the past decade to canonical quadrupedal and bipedal architectures that cannot be easily reconfigured to meet new tasks or recover from injury. Here we introduce autonomous modular legs: agile yet minimal, single-degree-of-freedom jointed links that can learn complex dynamic behaviors and may be freely attached to form legged metamachines at the meter scale. This enables rapid repair, redesign, and recombination of highly-dynamic modular agents that move quickly and acrobatically (non-quasistatically) through unstructured environments. Because each module is itself a complete agent, legged metamachines are able to sustain deep structural damage that would completely disable other legged robots. We also show how to encode the vast space of possible body configurations into a compact latent design genome that can be efficiently explored, revealing a wide diversity of novel legged forms.
Evolution and learning in differentiable robots
May 23, 2024The automatic design of robots has existed for 30 years but has been constricted by serial non-differentiable design evaluations, premature convergence to simple bodies or clumsy behaviors, and a lack of sim2real transfer to physical machines. Thus, here we employ massively-parallel differentiable simulations to rapidly and simultaneously optimize individual neural control of behavior across a large population of candidate body plans and return a fitness score for each design based on the performance of its fully optimized behavior. Non-differentiable changes to the mechanical structure of each robot in the population -- mutations that rearrange, combine, add, or remove body parts -- were applied by a genetic algorithm in an outer loop of search, generating a continuous flow of novel morphologies with highly-coordinated and graceful behaviors honed by gradient descent. This enabled the exploration of several orders-of-magnitude more designs than all previous methods, despite the fact that robots here have the potential to be much more complex, in terms of number of independent motors, than those in prior studies. We found that evolution reliably produces ``increasingly differentiable'' robots: body plans that smooth the loss landscape in which learning operates and thereby provide better training paths toward performant behaviors. Finally, one of the highly differentiable morphologies discovered in simulation was realized as a physical robot and shown to retain its optimized behavior. This provides a cyberphysical platform to investigate the relationship between evolution and learning in biological systems and broadens our understanding of how a robot's physical structure can influence the ability to train policies for it. Videos and code at https://sites.google.com/view/eldir.
Reinforcement learning for freeform robot design
Oct 09, 2023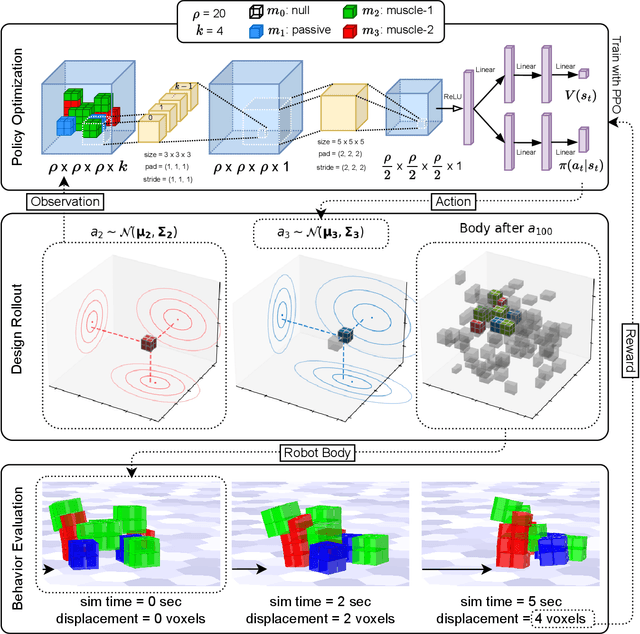
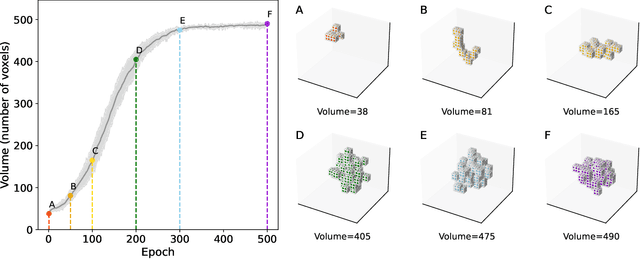
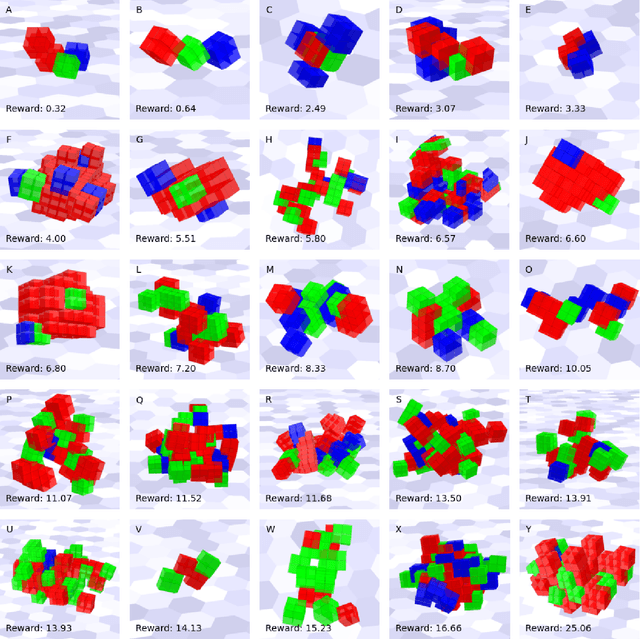
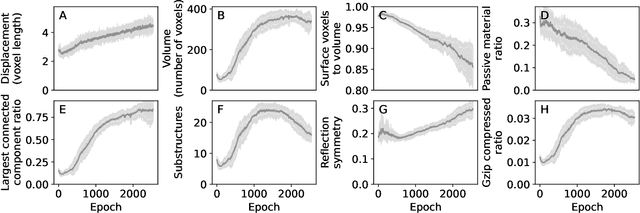
Inspired by the necessity of morphological adaptation in animals, a growing body of work has attempted to expand robot training to encompass physical aspects of a robot's design. However, reinforcement learning methods capable of optimizing the 3D morphology of a robot have been restricted to reorienting or resizing the limbs of a predetermined and static topological genus. Here we show policy gradients for designing freeform robots with arbitrary external and internal structure. This is achieved through actions that deposit or remove bundles of atomic building blocks to form higher-level nonparametric macrostructures such as appendages, organs and cavities. Although results are provided for open loop control only, we discuss how this method could be adapted for closed loop control and sim2real transfer to physical machines in future.
Efficient automatic design of robots
Jun 05, 2023Robots are notoriously difficult to design because of complex interdependencies between their physical structure, sensory and motor layouts, and behavior. Despite this, almost every detail of every robot built to date has been manually determined by a human designer after several months or years of iterative ideation, prototyping, and testing. Inspired by evolutionary design in nature, the automated design of robots using evolutionary algorithms has been attempted for two decades, but it too remains inefficient: days of supercomputing are required to design robots in simulation that, when manufactured, exhibit desired behavior. Here we show for the first time de-novo optimization of a robot's structure to exhibit a desired behavior, within seconds on a single consumer-grade computer, and the manufactured robot's retention of that behavior. Unlike other gradient-based robot design methods, this algorithm does not presuppose any particular anatomical form; starting instead from a randomly-generated apodous body plan, it consistently discovers legged locomotion, the most efficient known form of terrestrial movement. If combined with automated fabrication and scaled up to more challenging tasks, this advance promises near instantaneous design, manufacture, and deployment of unique and useful machines for medical, environmental, vehicular, and space-based tasks.
The Role of Cross-Silo Federated Learning in Facilitating Data Sharing in the Agri-Food Sector
Apr 14, 2021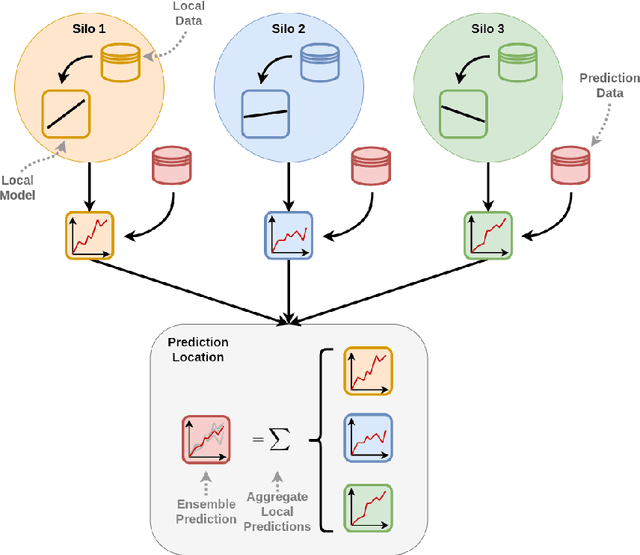
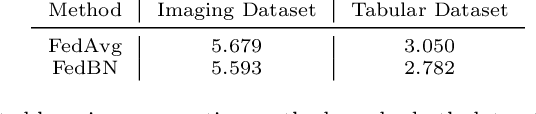
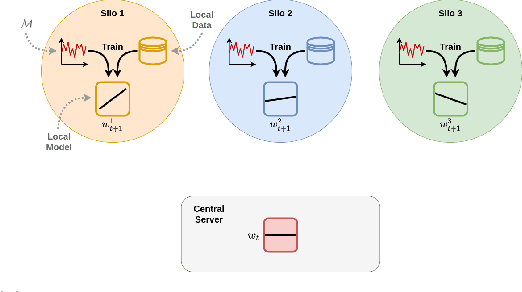
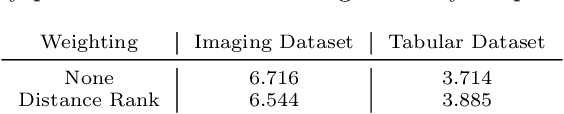
Data sharing remains a major hindering factor when it comes to adopting emerging AI technologies in general, but particularly in the agri-food sector. Protectiveness of data is natural in this setting; data is a precious commodity for data owners, which if used properly can provide them with useful insights on operations and processes leading to a competitive advantage. Unfortunately, novel AI technologies often require large amounts of training data in order to perform well, something that in many scenarios is unrealistic. However, recent machine learning advances, e.g. federated learning and privacy-preserving technologies, can offer a solution to this issue via providing the infrastructure and underpinning technologies needed to use data from various sources to train models without ever sharing the raw data themselves. In this paper, we propose a technical solution based on federated learning that uses decentralized data, (i.e. data that are not exchanged or shared but remain with the owners) to develop a cross-silo machine learning model that facilitates data sharing across supply chains. We focus our data sharing proposition on improving production optimization through soybean yield prediction, and provide potential use-cases that such methods can assist in other problem settings. Our results demonstrate that our approach not only performs better than each of the models trained on an individual data source, but also that data sharing in the agri-food sector can be enabled via alternatives to data exchange, whilst also helping to adopt emerging machine learning technologies to boost productivity.
Word2vec to behavior: morphology facilitates the grounding of language in machines
Aug 03, 2019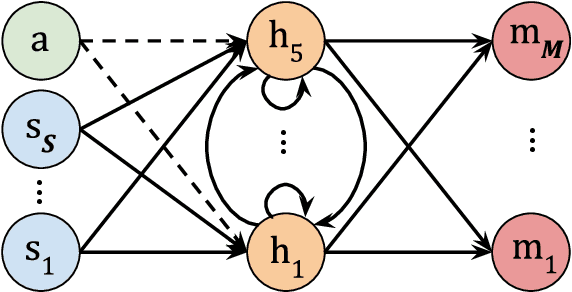

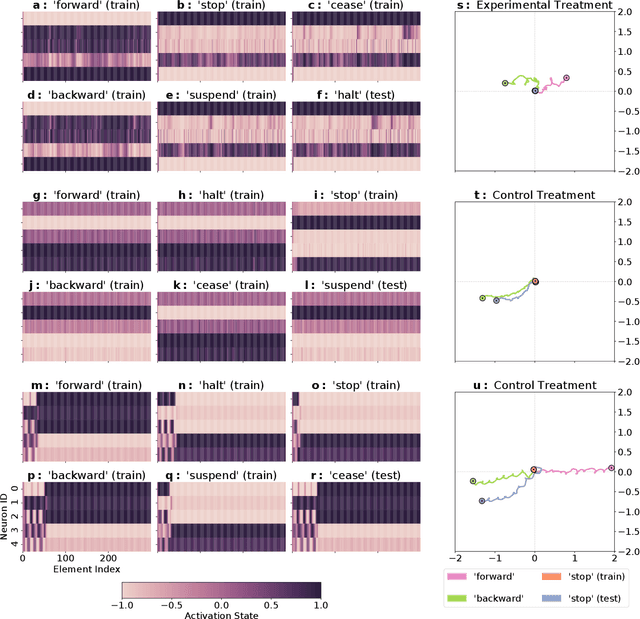

Enabling machines to respond appropriately to natural language commands could greatly expand the number of people to whom they could be of service. Recently, advances in neural network-trained word embeddings have empowered non-embodied text-processing algorithms, and suggest they could be of similar utility for embodied machines. Here we introduce a method that does so by training robots to act similarly to semantically-similar word2vec encoded commands. We show that this enables them to act appropriately, after training, to previously-unheard commands. Finally, we show that inducing such an alignment between motoric and linguistic similarities can be facilitated or hindered by the mechanical structure of the robot. This points to future, large scale methods that find and exploit relationships between action, language, and robot structure.
Learning Cheap and Novel Flight Itineraries
Dec 04, 2018


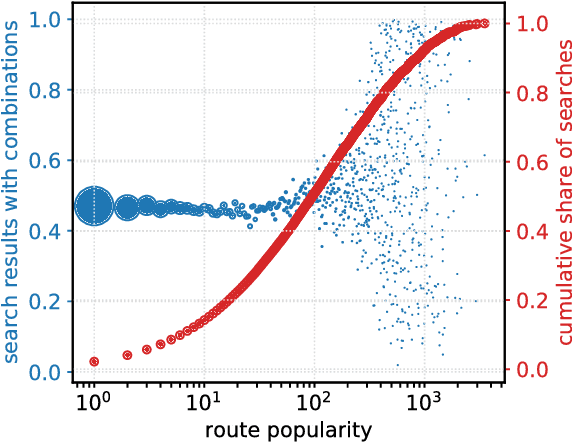
We consider the problem of efficiently constructing cheap and novel round trip flight itineraries by combining legs from different airlines. We analyse the factors that contribute towards the price of such itineraries and find that many result from the combination of just 30% of airlines and that the closer the departure of such itineraries is to the user's search date the more likely they are to be cheaper than the tickets from one airline. We use these insights to formulate the problem as a trade-off between the recall of cheap itinerary constructions and the costs associated with building them. We propose a supervised learning solution with location embeddings which achieves an AUC=80.48, a substantial improvement over simpler baselines. We discuss various practical considerations for dealing with the staleness and the stability of the model and present the design of the machine learning pipeline. Finally, we present an analysis of the model's performance in production and its impact on Skyscanner's users.