 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconfigurable legged metamachines that run on autonomous modular legs
May 01, 2025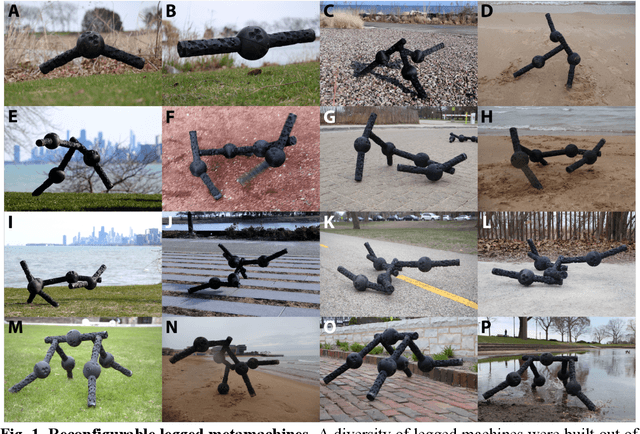
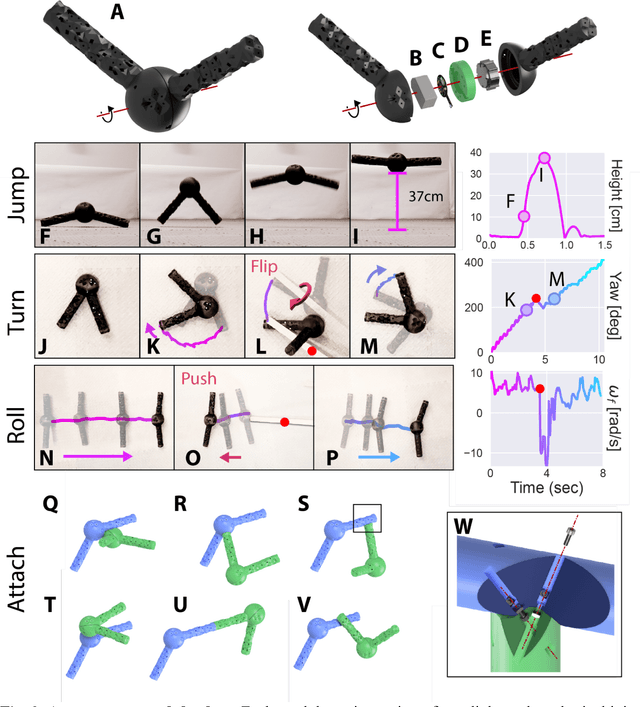
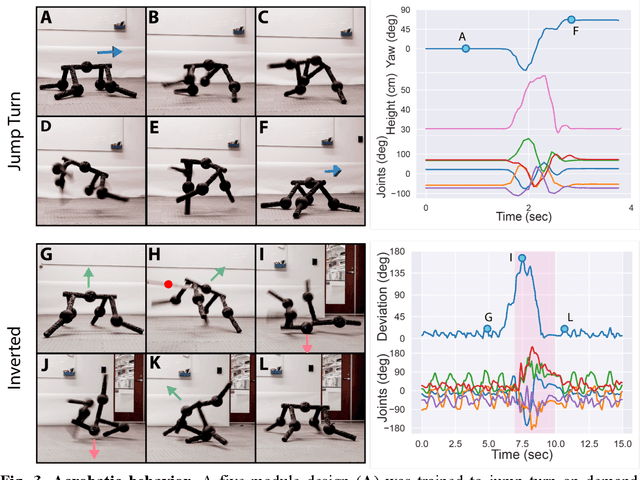
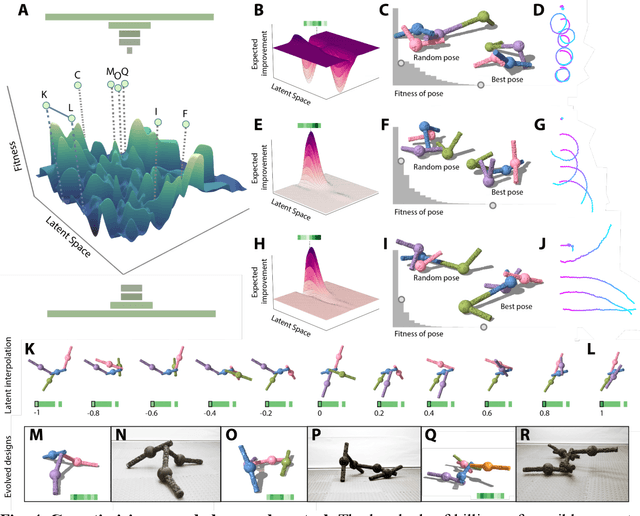
Legged machines are becoming increasingly agile and adaptive but they have so far lacked the basic reconfigurability of legged animals, which have been rearranged and reshaped to fill millions of niches. Unlike their biological counterparts, legged machines have largely converged over the past decade to canonical quadrupedal and bipedal architectures that cannot be easily reconfigured to meet new tasks or recover from injury. Here we introduce autonomous modular legs: agile yet minimal, single-degree-of-freedom jointed links that can learn complex dynamic behaviors and may be freely attached to form legged metamachines at the meter scale. This enables rapid repair, redesign, and recombination of highly-dynamic modular agents that move quickly and acrobatically (non-quasistatically) through unstructured environments. Because each module is itself a complete agent, legged metamachines are able to sustain deep structural damage that would completely disable other legged robots. We also show how to encode the vast space of possible body configurations into a compact latent design genome that can be efficiently explored, revealing a wide diversity of novel legged forms.
A Single Motor Nano Aerial Vehicle with Novel Peer-to-Peer Communication and Sensing Mechanism
May 23, 2024Communication and position sensing are among the most important capabilities for swarm robots to interact with their peers and perform tasks collaboratively. However, the hardware required to facilitate communication and position sensing is often too complicated, expensive, and bulky to be carried on swarm robots. Here we present Maneuverable Piccolissimo 3 (MP3), a minimalist, single motor drone capable of executing inter-robot communication via infrared light and triangulation-based sensing of relative bearing, distance, and elevation using message arrival time. Thanks to its novel design, MP3 can communicate with peers and localize itself using simple components, keeping its size and mass small and making it inherently safe for human interaction. Here we present the hardware and software design of MP3 and demonstrate its capability to localize itself, fly stably and maneuver in the environment using peer-to-peer communication and sensing.
Rollbot: a Spherical Robot Driven by a Single Actuator
Apr 08, 2024Here we present Rollbot, the first spherical robot capable of controllably maneuvering on 2D plane with a single actuator. Rollbot rolls on the ground in circular pattern and controls its motion by changing the curvature of the trajectory through accelerating and decelerating its single motor and attached mass. We present the theoretical analysis, design, and control of Rollbot, and demonstrate its ability to move in a controllable circular pattern and follow waypoints.
PCBot: a Minimalist Robot Designed for Swarm Applications
Apr 07, 2024



Complexity, cost, and power requirements for the actuation of individual robots can play a large factor in limiting the size of robotic swarms. Here we present PCBot, a minimalist robot that can precisely move on an orbital shake table using a bi-stable solenoid actuator built directly into its PCB. This allows the actuator to be built as part of the automated PCB manufacturing process, greatly reducing the impact it has on manual assembly. Thanks to this novel actuator design, PCBot has merely five major components and can be assembled in under 20 seconds, potentially enabling them to be easily mass-manufactured. Here we present the electro-magnetic and mechanical design of PCBot. Additionally, a prototype robot is used to demonstrate its ability to move in a straight line as well as follow given paths.
Continuous Sculpting: Persistent Swarm Shape Formation Adaptable to Local Environmental Changes
Apr 02, 2024Despite their growing popularity, swarms of robots remain limited by the operating time of each individual. We present algorithms which allow a human to sculpt a swarm of robots into a shape that persists in space perpetually, independent of onboard energy constraints such as batteries. Robots generate a path through a shape such that robots cycle in and out of the shape. Robots inside the shape react to human initiated changes and adapt the path through the shape accordingly. Robots outside the shape recharge and return to the shape so that the shape can persist indefinitely. The presented algorithms communicate shape changes throughout the swarm using message passing and robot motion. These algorithms enable the swarm to persist through any arbitrary changes to the shape. We describe these algorithms in detail and present their performance in simulation and on a swarm of mobile robots. The result is a swarm behavior more suitable for extended duration, dynamic shape-based tasks in applications such as agriculture and emergency response.
Self-Healing Distributed Swarm Formation Control Using Image Moments
Dec 12, 2023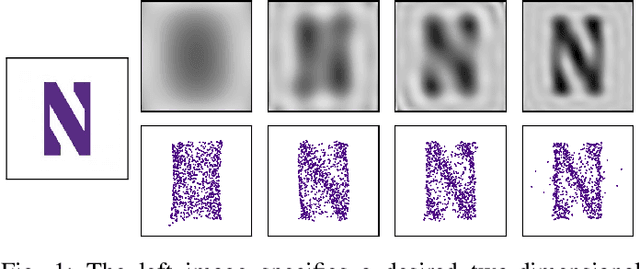
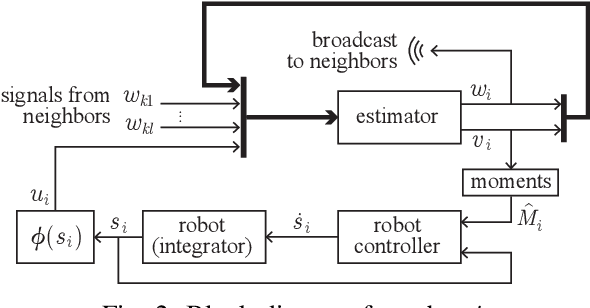
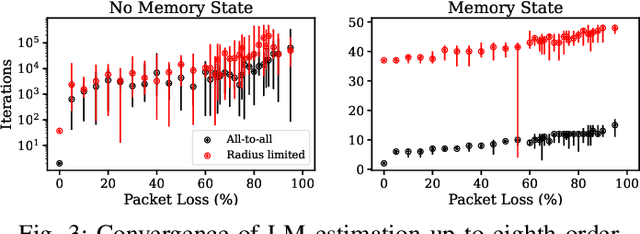
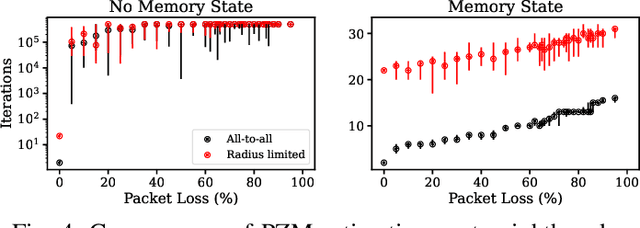
Human-swarm interaction is facilitated by a low-dimensional encoding of the swarm formation, independent of the (possibly large) number of robots. We propose using image moments to encode two-dimensional formations of robots. Each robot knows the desired formation moments, and simultaneously estimates the current moments of the entire swarm while controlling its motion to better achieve the desired group moments. The estimator is a distributed optimization, requiring no centralized processing, and self-healing, meaning that the process is robust to initialization errors, packet drops, and robots being added to or removed from the swarm. Our experimental results with a swarm of 50 robots, suffering nearly 50% packet loss, show that distributed estimation and control of image moments effectively achieves desired swarm formations.
Disassemblable Fieldwork CT Scanner Using a 3D-printed Calibration Phantom
Nov 12, 2020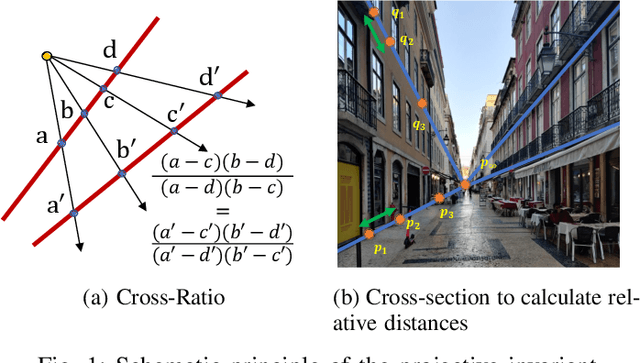
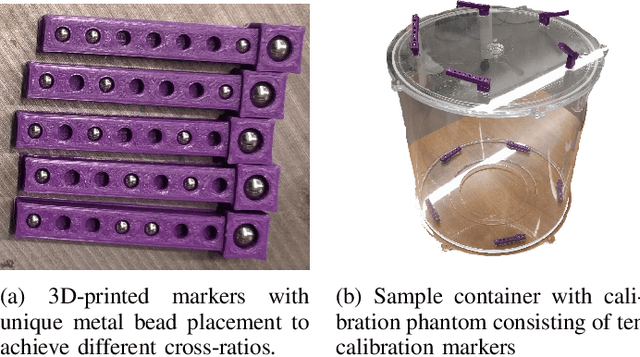
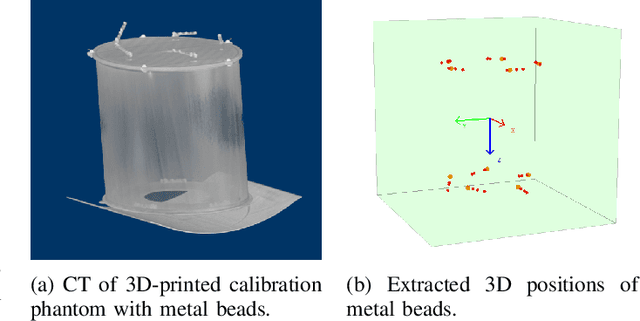
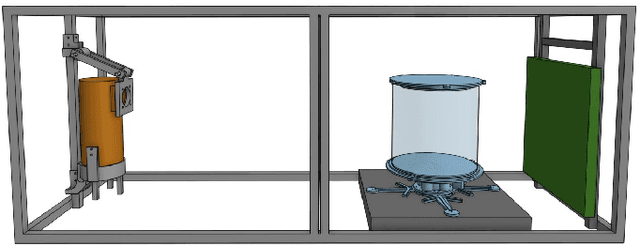
The use of computed tomography (CT) imaging has become of increasing interest to academic areas outside of the field of medical imaging and industrial inspection, e.g., to biology and cultural heritage research. The pecularities of these fields, however, sometimes require that objects need to be imaged on-site, e.g., in field-work conditions or in museum collections. Under these circumstances, it is often not possible to use a commercial device and a custom solution is the only viable option. In order to achieve high image quality under adverse conditions, reliable calibration and trajectory reproduction are usually key requirements for any custom CT scanning system. Here, we introduce the construction of a low-cost disassemblable CT scanner that allows calibration even when trajectory reproduction is not possible due to the limitations imposed by the project conditions. Using 3D-printed in-image calibration phantoms, we compute a projection matrix directly from each captured X-ray projection. We describe our method in detail and show successful tomographic reconstructions of several specimen as proof of concept.
* This paper was originally published at the 6th International Conference on Image Formation in X-Ray Computed Tomography (CTmeeting 2020)
CPL-SLAM: Efficient and Certifiably Correct Planar Graph-Based SLAM Using the Complex Number Representation
Jun 25, 2020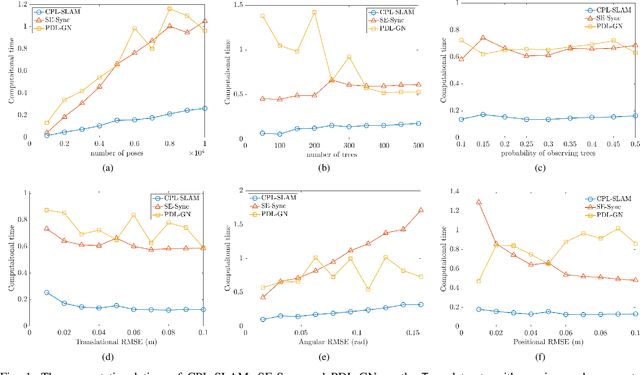
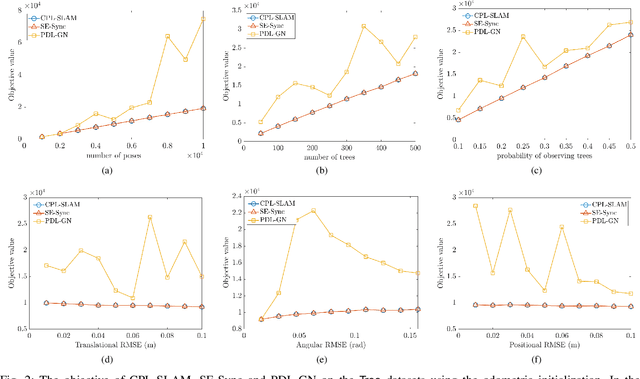
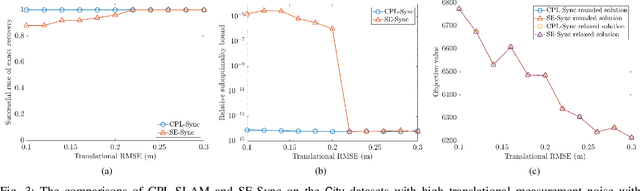
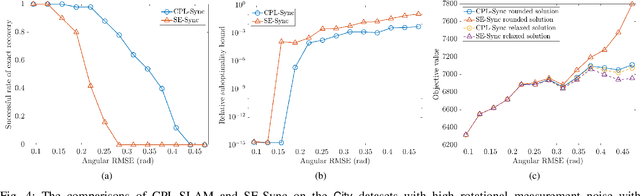
In this paper, we consider the problem of planar graph-based simultaneous localization and mapping (SLAM) that involves both poses of the autonomous agent and positions of observed landmarks. We present CPL-SLAM, an efficient and certifiably correct algorithm to solve planar graph-based SLAM using the complex number representation. We formulate and simplify planar graph-based SLAM as the maximum likelihood estimation (MLE) on the product of unit complex numbers, and relax this nonconvex quadratic complex optimization problem to convex complex semidefinite programming (SDP). Furthermore, we simplify the corresponding complex semidefinite programming to Riemannian staircase optimization (RSO) on the complex oblique manifold that can be solved with the Riemannian trust region (RTR) method. In addition, we prove that the SDP relaxation and RSO simplification are tight as long as the noise magnitude is below a certain threshold. The efficacy of this work is validated through applications of CPL-SLAM and comparisons with existing state-of-the-art methods on planar graph-based SLAM, which indicates that our proposed algorithm is capable of solving planar graph-based SLAM certifiably, and is more efficient in numerical computation and more robust to measurement noise than existing state-of-the-art methods. The C++ code for CPL-SLAM is available at https://github.com/MurpheyLab/CPL-SLAM.