 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructured Imitation Learning of Interactive Policies through Inverse Games
Nov 17, 2025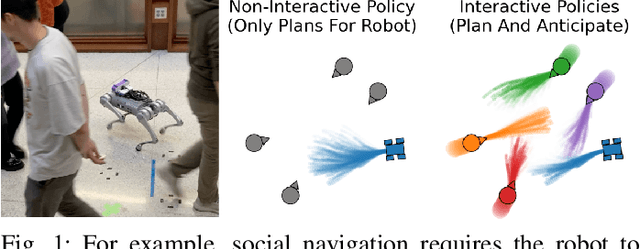


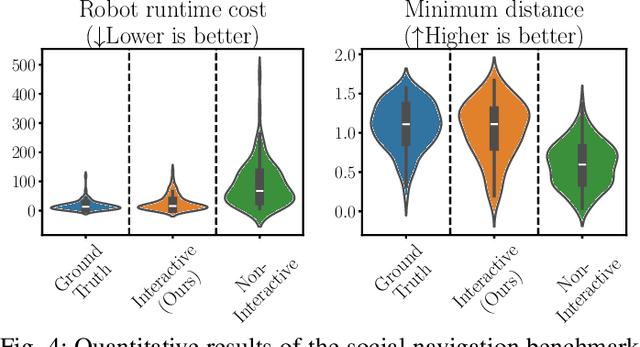
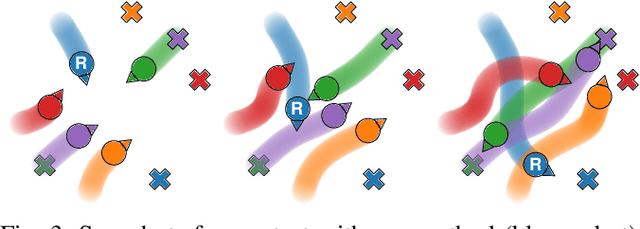
Generative model-based imitation learning methods have recently achieved strong results in learning high-complexity motor skills from human demonstrations. However, imitation learning of interactive policies that coordinate with humans in shared spaces without explicit communication remains challenging, due to the significantly higher behavioral complexity in multi-agent interactions compared to non-interactive tasks. In this work, we introduce a structured imitation learning framework for interactive policies by combining generative single-agent policy learning with a flexible yet expressive game-theoretic structure. Our method explicitly separates learning into two steps: first, we learn individual behavioral patterns from multi-agent demonstrations using standard imitation learning; then, we structurally learn inter-agent dependencies by solving an inverse game problem. Preliminary results in a synthetic 5-agent social navigation task show that our method significantly improves non-interactive policies and performs comparably to the ground truth interactive policy using only 50 demonstrations. These results highlight the potential of structured imitation learning in interactive settings.
Volumetric Ergodic Control
Nov 14, 2025Ergodic control synthesizes optimal coverage behaviors over spatial distributions for nonlinear systems. However, existing formulations model the robot as a non-volumetric point, but in practice a robot interacts with the environment through its body and sensors with physical volume. In this work, we introduce a new ergodic control formulation that optimizes spatial coverage using a volumetric state representation. Our method preserves the asymptotic coverage guarantees of ergodic control, adds minimal computational overhead for real-time control, and supports arbitrary sample-based volumetric models. We evaluate our method across search and manipulation tasks -- with multiple robot dynamics and end-effector geometries or sensor models -- and show that it improves coverage efficiency by more than a factor of two while maintaining a 100% task completion rate across all experiments, outperforming the standard ergodic control method. Finally, we demonstrate the effectiveness of our method on a robot arm performing mechanical erasing tasks.
Scalable Coverage Trajectory Synthesis on GPUs as Statistical Inference
Nov 14, 2025Coverage motion planning is essential to a wide range of robotic tasks. Unlike conventional motion planning problems, which reason over temporal sequences of states, coverage motion planning requires reasoning over the spatial distribution of entire trajectories, making standard motion planning methods limited in computational efficiency and less amenable to modern parallelization frameworks. In this work, we formulate the coverage motion planning problem as a statistical inference problem from the perspective of flow matching, a generative modeling technique that has gained significant attention in recent years. The proposed formulation unifies commonly used statistical discrepancy measures, such as Kullback-Leibler divergence and Sinkhorn divergence, with a standard linear quadratic regulator problem. More importantly, it decouples the generation of trajectory gradients for coverage from the synthesis of control under nonlinear system dynamics, enabling significant acceleration through parallelization on modern computational architectures, particularly Graphics Processing Units (GPUs). This paper focuses on the advantages of this formulation in terms of scalability through parallelization, highlighting its computational benefits compared to conventional methods based on waypoint tracking.
Flow Matching Ergodic Coverage
Apr 24, 2025Ergodic coverage effectively generates exploratory behaviors for embodied agents by aligning the spatial distribution of the agent's trajectory with a target distribution, where the difference between these two distributions is measured by the ergodic metric. However, existing ergodic coverage methods are constrained by the limited set of ergodic metrics available for control synthesis, fundamentally limiting their performance. In this work, we propose an alternative approach to ergodic coverage based on flow matching, a technique widely used in generative inference for efficient and scalable sampling. We formally derive the flow matching problem for ergodic coverage and show that it is equivalent to a linear quadratic regulator problem with a closed-form solution. Our formulation enables alternative ergodic metrics from generative inference that overcome the limitations of existing ones. These metrics were previously infeasible for control synthesis but can now be supported with no computational overhead. Specifically, flow matching with the Stein variational gradient flow enables control synthesis directly over the score function of the target distribution, improving robustness to the unnormalized distributions; on the other hand, flow matching with the Sinkhorn divergence flow enables an optimal transport-based ergodic metric, improving coverage performance on non-smooth distributions with irregular supports. We validate the improved performance and competitive computational efficiency of our method through comprehensive numerical benchmarks and across different nonlinear dynamics. We further demonstrate the practicality of our method through a series of drawing and erasing tasks on a Franka robot.
Inverse Mixed Strategy Games with Generative Trajectory Models
Feb 05, 2025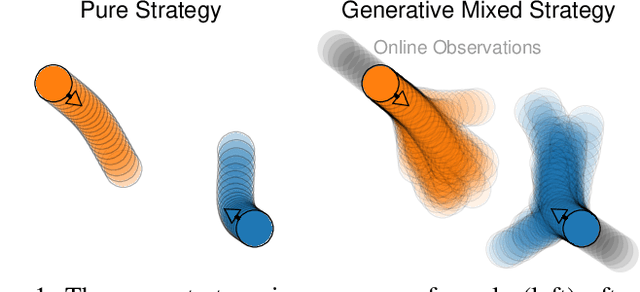
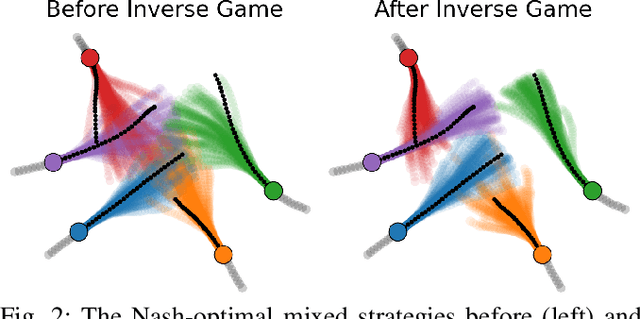
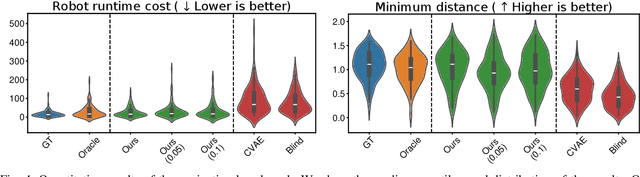
Game-theoretic models are effective tools for modeling multi-agent interactions, especially when robots need to coordinate with humans. However, applying these models requires inferring their specifications from observed behaviors -- a challenging task known as the inverse game problem. Existing inverse game approaches often struggle to account for behavioral uncertainty and measurement noise, and leverage both offline and online data. To address these limitations, we propose an inverse game method that integrates a generative trajectory model into a differentiable mixed-strategy game framework. By representing the mixed strategy with a conditional variational autoencoder (CVAE), our method can infer high-dimensional, multi-modal behavior distributions from noisy measurements while adapting in real-time to new observations. We extensively evaluate our method in a simulated navigation benchmark, where the observations are generated by an unknown game model. Despite the model mismatch, our method can infer Nash-optimal actions comparable to those of the ground-truth model and the oracle inverse game baseline, even in the presence of uncertain agent objectives and noisy measurements.
Koopman Operators in Robot Learning
Aug 08, 2024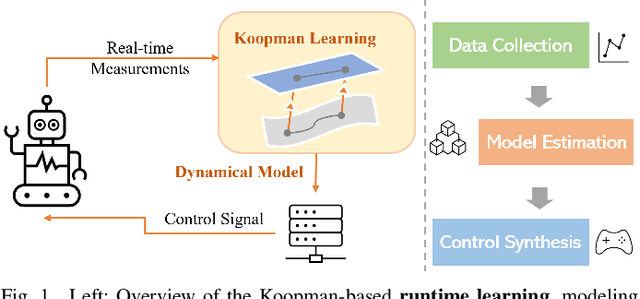
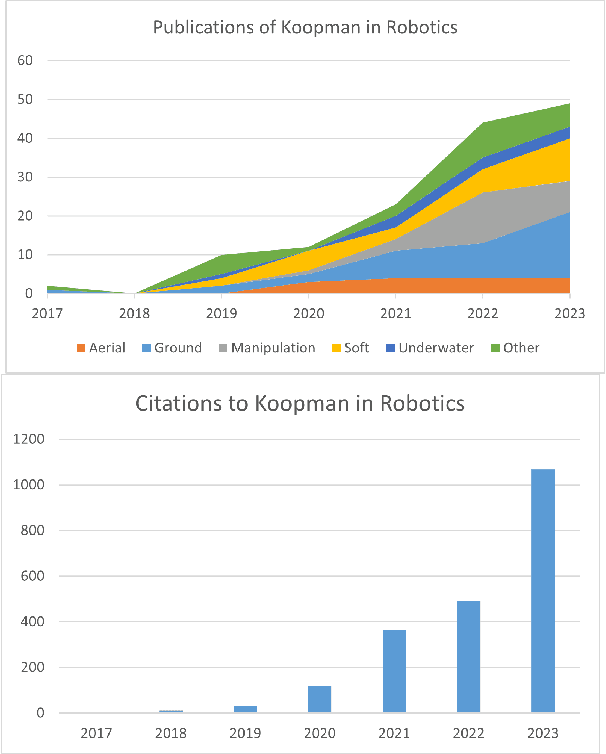
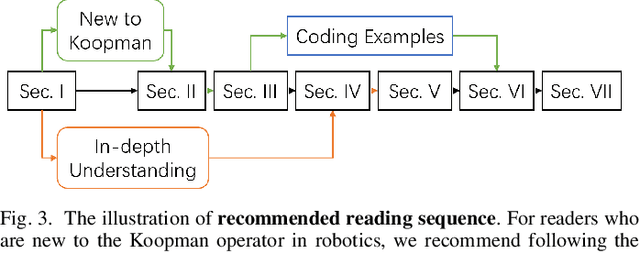
Koopman operator theory offers a rigorous treatment of dynamics and has been emerging as a powerful modeling and learning-based control method enabling significant advancements across various domains of robotics. Due to its ability to represent nonlinear dynamics as a linear operator, Koopman theory offers a fresh lens through which to understand and tackle the modeling and control of complex robotic systems. Moreover, it enables incremental updates and is computationally inexpensive making it particularly appealing for real-time applications and online active learning. This review comprehensively presents recent research results on advancing Koopman operator theory across diverse domains of robotics, encompassing aerial, legged, wheeled, underwater, soft, and manipulator robotics. Furthermore, it offers practical tutorials to help new users get started as well as a treatise of more advanced topics leading to an outlook on future directions and open research questions. Taken together, these provide insights into the potential evolution of Koopman theory as applied to the field of robotics.
Mixed-Strategy Nash Equilibrium for Crowd Navigation
Mar 05, 2024We address the problem of finding mixed-strategy Nash equilibrium for crowd navigation. Mixed-strategy Nash equilibrium provides a rigorous model for the robot to anticipate uncertain yet cooperative human behavior in crowds, but the computation cost is often too high for scalable and real-time decision-making. Here we prove that a simple iterative Bayesian updating scheme converges to the Nash equilibrium of a mixed-strategy social navigation game. Furthermore, we propose a data-driven framework to construct the game by initializing agent strategies as Gaussian processes learned from human datasets. Based on the proposed mixed-strategy Nash equilibrium model, we develop a sampling-based crowd navigation framework that can be integrated into existing navigation methods and runs in real-time on a laptop CPU. We evaluate our framework in both simulated environments and real-world human datasets in unstructured environments. Our framework consistently outperforms both non-learning and learning-based methods on both safety and navigation efficiency and reaches human-level crowd navigation performance on top of a meta-planner.
Fast Ergodic Search with Kernel Functions
Mar 03, 2024Ergodic search enables optimal exploration of an information distribution while guaranteeing the asymptotic coverage of the search space. However, current methods typically have exponential computation complexity in the search space dimension and are restricted to Euclidean space. We introduce a computationally efficient ergodic search method. Our contributions are two-fold. First, we develop a kernel-based ergodic metric and generalize it from Euclidean space to Lie groups. We formally prove the proposed metric is consistent with the standard ergodic metric while guaranteeing linear complexity in the search space dimension. Secondly, we derive the first-order optimality condition of the kernel ergodic metric for nonlinear systems, which enables efficient trajectory optimization. Comprehensive numerical benchmarks show that the proposed method is at least two orders of magnitude faster than the state-of-the-art algorithm. Finally, we demonstrate the proposed algorithm with a peg-in-hole insertion task. We formulate the problem as a coverage task in the space of SE(3) and use a 30-second-long human demonstration as the prior distribution for ergodic coverage. Ergodicity guarantees the asymptotic solution of the peg-in-hole problem so long as the solution resides within the prior information distribution, which is seen in the 100\% success rate.
Human Robot Pacing Mismatch
Mar 03, 2024A widely accepted explanation for robots planning overcautious or overaggressive trajectories alongside human is that the crowd density exceeds a threshold such that all feasible trajectories are considered unsafe -- the freezing robot problem. However, even with low crowd density, the robot's navigation performance could still drop drastically when in close proximity to human. In this work, we argue that a broader cause of suboptimal navigation performance near human is due to the robot's misjudgement for the human's willingness (flexibility) to share space with others, particularly when the robot assumes the human's flexibility holds constant during interaction, a phenomenon of what we call human robot pacing mismatch. We show that the necessary condition for solving pacing mismatch is to model the evolution of both the robot and the human's flexibility during decision making, a strategy called distribution space modeling. We demonstrate the advantage of distribution space coupling through an anecdotal case study and discuss the future directions of solving human robot pacing mismatch.
Decentralization and Acceleration Enables Large-Scale Bundle Adjustment
May 15, 2023



Scaling to arbitrarily large bundle adjustment problems requires data and compute to be distributed across multiple devices. Centralized methods in prior works are only able to solve small or medium size problems due to overhead in computation and communication. In this paper, we present a fully decentralized method that alleviates computation and communication bottlenecks to solve arbitrarily large bundle adjustment problems. We achieve this by reformulating the reprojection error and deriving a novel surrogate function that decouples optimization variables from different devices. This function makes it possible to use majorization minimization techniques and reduces bundle adjustment to independent optimization subproblems that can be solved in parallel. We further apply Nesterov's acceleration and adaptive restart to improve convergence while maintaining its theoretical guarantees. Despite limited peer-to-peer communication, our method has provable convergence to first-order critical points under mild conditions. On extensive benchmarks with public datasets, our method converges much faster than decentralized baselines with similar memory usage and communication load. Compared to centralized baselines using a single device, our method, while being decentralized, yields more accurate solutions with significant speedups of up to 953.7x over Ceres and 174.6x over DeepLM. Code: https://github.com/facebookresearch/DABA.