 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDon't Get Stuck: A Deadlock Recovery Approach
Aug 19, 2024When multiple agents share space, interactions can lead to deadlocks, where no agent can advance towards its goal. This paper addresses this challenge with a deadlock recovery strategy. In particular, the proposed algorithm integrates hybrid-A$^\star$, STL, and MPPI frameworks. Specifically, hybrid-A$^\star$ generates a reference path, STL defines a goal (deadlock avoidance) and associated constraints (w.r.t. traffic rules), and MPPI refines the path and speed accordingly. This STL-MPPI framework ensures system compliance to specifications and dynamics while ensuring the safety of the resulting maneuvers, indicating a strong potential for application to complex traffic scenarios (and rules) in practice. Validation studies are conducted in simulations and on scaled cars, respectively, to demonstrate the effectiveness of the proposed algorithm.
Mixed-Strategy Nash Equilibrium for Crowd Navigation
Mar 05, 2024



We address the problem of finding mixed-strategy Nash equilibrium for crowd navigation. Mixed-strategy Nash equilibrium provides a rigorous model for the robot to anticipate uncertain yet cooperative human behavior in crowds, but the computation cost is often too high for scalable and real-time decision-making. Here we prove that a simple iterative Bayesian updating scheme converges to the Nash equilibrium of a mixed-strategy social navigation game. Furthermore, we propose a data-driven framework to construct the game by initializing agent strategies as Gaussian processes learned from human datasets. Based on the proposed mixed-strategy Nash equilibrium model, we develop a sampling-based crowd navigation framework that can be integrated into existing navigation methods and runs in real-time on a laptop CPU. We evaluate our framework in both simulated environments and real-world human datasets in unstructured environments. Our framework consistently outperforms both non-learning and learning-based methods on both safety and navigation efficiency and reaches human-level crowd navigation performance on top of a meta-planner.
Move Beyond Trajectories: Distribution Space Coupling for Crowd Navigation
Jun 25, 2021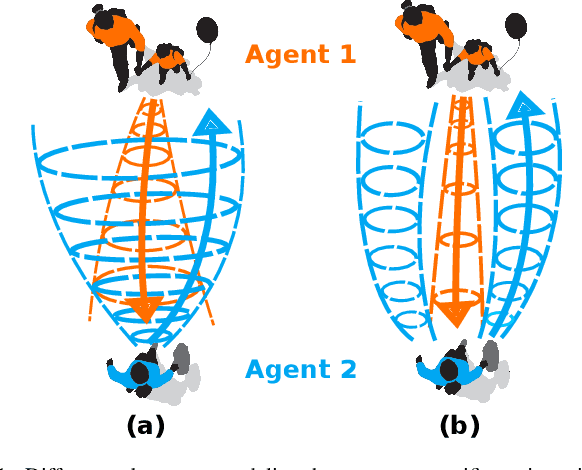
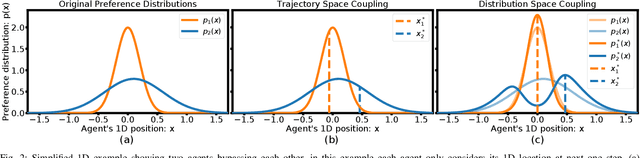
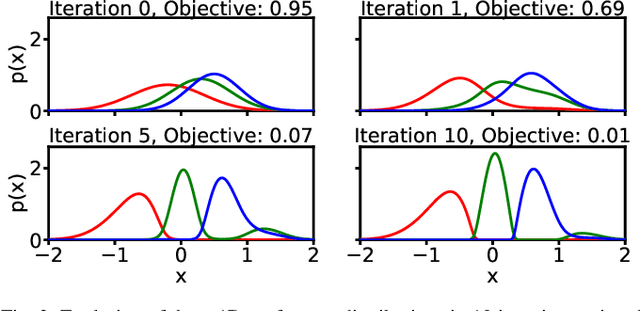
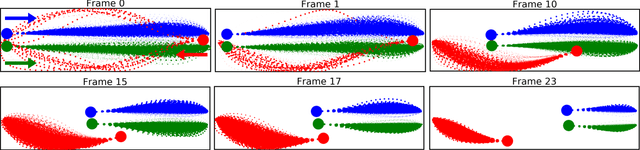
Cooperatively avoiding collision is a critical functionality for robots navigating in dense human crowds, failure of which could lead to either overaggressive or overcautious behavior. A necessary condition for cooperative collision avoidance is to couple the prediction of the agents' trajectories with the planning of the robot's trajectory. However, it is unclear that trajectory based cooperative collision avoidance captures the correct agent attributes. In this work we migrate from trajectory based coupling to a formalism that couples agent preference distributions. In particular, we show that preference distributions (probability density functions representing agents' intentions) can capture higher order statistics of agent behaviors, such as willingness to cooperate. Thus, coupling in distribution space exploits more information about inter-agent cooperation than coupling in trajectory space. We thus introduce a general objective for coupled prediction and planning in distribution space, and propose an iterative best response optimization method based on variational analysis with guaranteed sufficient decrease. Based on this analysis, we develop a sampling-based motion planning framework called DistNav that runs in real time on a laptop CPU. We evaluate our approach on challenging scenarios from both real world datasets and simulation environments, and benchmark against a wide variety of model based and machine learning based approaches. The safety and efficiency statistics of our approach outperform all other models. Finally, we find that DistNav is competitive with human safety and efficiency performance.
* 12 pages
Core Challenges of Social Robot Navigation: A Survey
Mar 17, 2021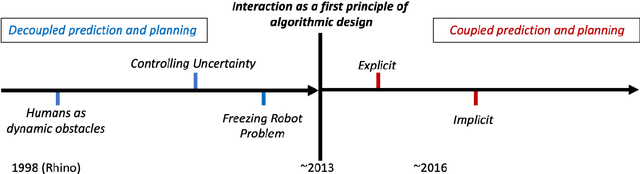



Robot navigation in crowded public spaces is a complex task that requires addressing a variety of engineering and human factors challenges. These challenges have motivated a great amount of research resulting in important developments for the fields of robotics and human-robot interaction over the past three decades. Despite the significant progress and the massive recent interest, we observe a number of significant remaining challenges that prohibit the seamless deployment of autonomous robots in public pedestrian environments. In this survey article, we organize existing challenges into a set of categories related to broader open problems in motion planning, behavior design, and evaluation methodologies. Within these categories, we review past work, and offer directions for future research. Our work builds upon and extends earlier survey efforts by a) taking a critical perspective and diagnosing fundamental limitations of adopted practices in the field and b) offering constructive feedback and ideas that we aspire will drive research in the field over the coming decade.
Learning Pose Estimation for UAV Autonomous Navigation andLanding Using Visual-Inertial Sensor Data
Dec 10, 2019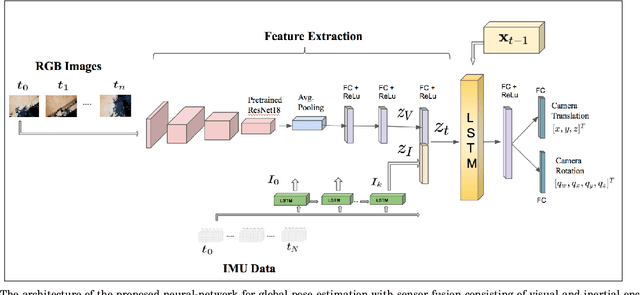
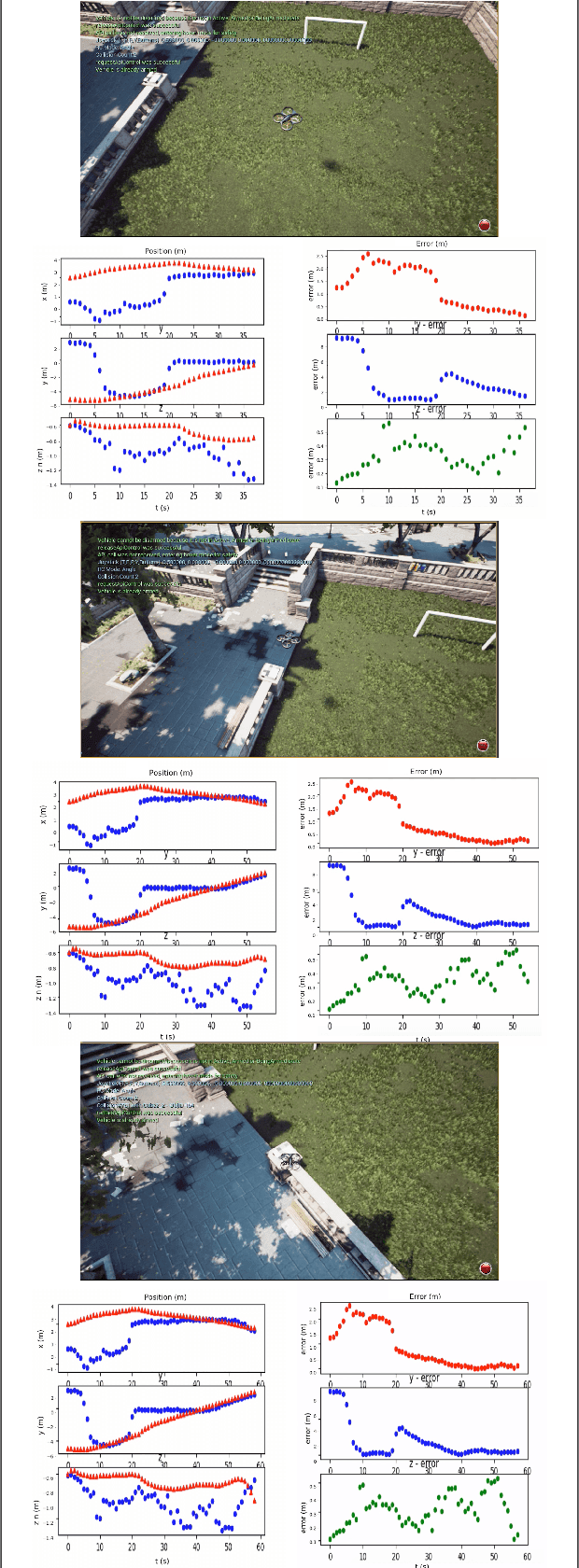
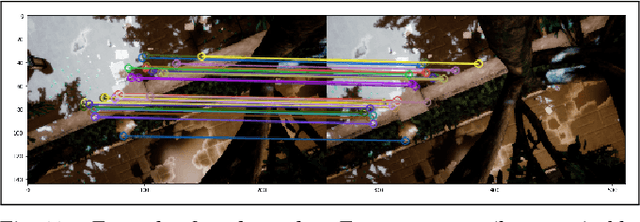
In this work, we propose a robust network-in-the-loop control system that allows an Unmanned-Aerial-Vehicles to navigate and land autonomously ona desired target. To estimate the global pose of theaerial vehicle, we develop a deep neural network ar-chitecture for visual-inertial odometry, which providesa robust alternative to traditional techniques for au-tonomous navigation of Unmanned-Aerial-Vehicles. Wefirst provide experimental results on the accuracy ofthe estimation by comparing the prediction of our modelto traditional visual-inertial approaches on the publiclyavailable EuRoC MAV dataset. The results indicate aclear improvement in the accuracy of the pose estima-tion up to 25% against the baseline. Second, we useAirsim, a simulator available as a plugin for UnrealEngine, to create new datasets of photorealistic imagesand inertial measurement to train and test our model.We finally integrate the proposed architecture for globallocalization with the Airsim closed-loop control system,and we provide simulation results for the autonomouslanding of the aerial vehicle.