 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKGLAMP: Knowledge Graph-guided Language model for Adaptive Multi-robot Planning and Replanning
Feb 04, 2026Heterogeneous multi-robot systems are increasingly deployed in long-horizon missions that require coordination among robots with diverse capabilities. However, existing planning approaches struggle to construct accurate symbolic representations and maintain plan consistency in dynamic environments. Classical PDDL planners require manually crafted symbolic models, while LLM-based planners often ignore agent heterogeneity and environmental uncertainty. We introduce KGLAMP, a knowledge-graph-guided LLM planning framework for heterogeneous multi-robot teams. The framework maintains a structured knowledge graph encoding object relations, spatial reachability, and robot capabilities, which guides the LLM in generating accurate PDDL problem specifications. The knowledge graph serves as a persistent, dynamically updated memory that incorporates new observations and triggers replanning upon detecting inconsistencies, enabling symbolic plans to adapt to evolving world states. Experiments on the MAT-THOR benchmark show that KGLAMP improves performance by at least 25.5% over both LLM-only and PDDL-based variants.
Occupancy-aware Trajectory Planning for Autonomous Valet Parking in Uncertain Dynamic Environments
Sep 11, 2025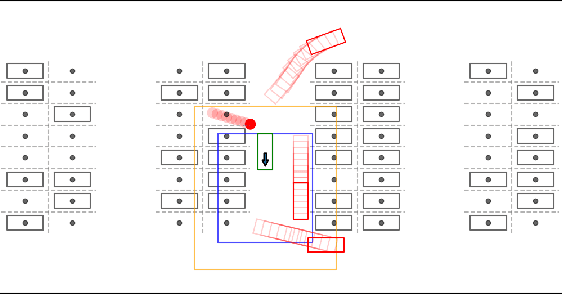
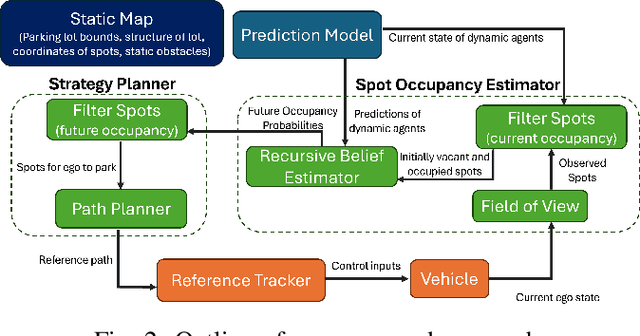
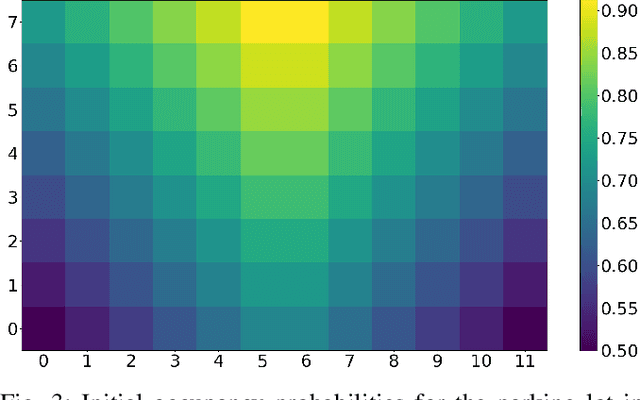
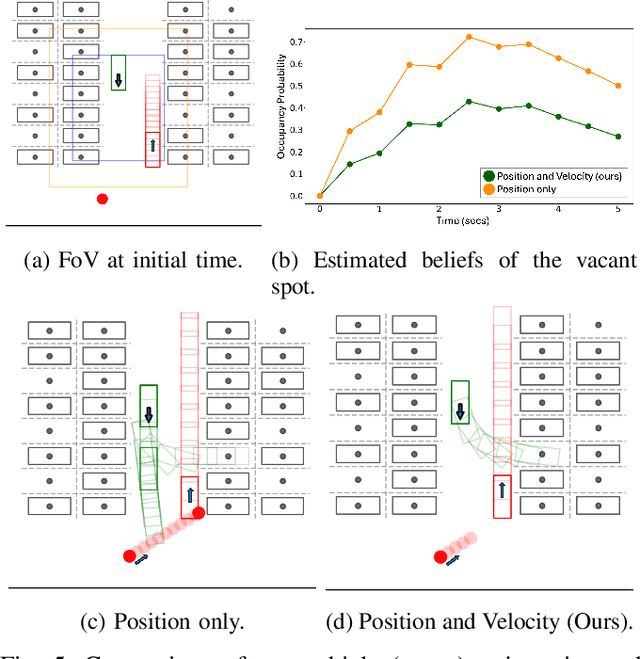
Accurately reasoning about future parking spot availability and integrated planning is critical for enabling safe and efficient autonomous valet parking in dynamic, uncertain environments. Unlike existing methods that rely solely on instantaneous observations or static assumptions, we present an approach that predicts future parking spot occupancy by explicitly distinguishing between initially vacant and occupied spots, and by leveraging the predicted motion of dynamic agents. We introduce a probabilistic spot occupancy estimator that incorporates partial and noisy observations within a limited Field-of-View (FoV) model and accounts for the evolving uncertainty of unobserved regions. Coupled with this, we design a strategy planner that adaptively balances goal-directed parking maneuvers with exploratory navigation based on information gain, and intelligently incorporates wait-and-go behaviors at promising spots. Through randomized simulations emulating large parking lots, we demonstrate that our framework significantly improves parking efficiency, safety margins, and trajectory smoothness compared to existing approaches.
IANN-MPPI: Interaction-Aware Neural Network-Enhanced Model Predictive Path Integral Approach for Autonomous Driving
Jul 16, 2025Motion planning for autonomous vehicles (AVs) in dense traffic is challenging, often leading to overly conservative behavior and unmet planning objectives. This challenge stems from the AVs' limited ability to anticipate and respond to the interactive behavior of surrounding agents. Traditional decoupled prediction and planning pipelines rely on non-interactive predictions that overlook the fact that agents often adapt their behavior in response to the AV's actions. To address this, we propose Interaction-Aware Neural Network-Enhanced Model Predictive Path Integral (IANN-MPPI) control, which enables interactive trajectory planning by predicting how surrounding agents may react to each control sequence sampled by MPPI. To improve performance in structured lane environments, we introduce a spline-based prior for the MPPI sampling distribution, enabling efficient lane-changing behavior. We evaluate IANN-MPPI in a dense traffic merging scenario, demonstrating its ability to perform efficient merging maneuvers. Our project website is available at https://sites.google.com/berkeley.edu/iann-mppi
Frenet Corridor Planner: An Optimal Local Path Planning Framework for Autonomous Driving
May 06, 2025Motivated by the requirements for effectiveness and efficiency, path-speed decomposition-based trajectory planning methods have widely been adopted for autonomous driving applications. While a global route can be pre-computed offline, real-time generation of adaptive local paths remains crucial. Therefore, we present the Frenet Corridor Planner (FCP), an optimization-based local path planning strategy for autonomous driving that ensures smooth and safe navigation around obstacles. Modeling the vehicles as safety-augmented bounding boxes and pedestrians as convex hulls in the Frenet space, our approach defines a drivable corridor by determining the appropriate deviation side for static obstacles. Thereafter, a modified space-domain bicycle kinematics model enables path optimization for smoothness, boundary clearance, and dynamic obstacle risk minimization. The optimized path is then passed to a speed planner to generate the final trajectory. We validate FCP through extensive simulations and real-world hardware experiments, demonstrating its efficiency and effectiveness.
Graph-based Path Planning with Dynamic Obstacle Avoidance for Autonomous Parking
Apr 17, 2025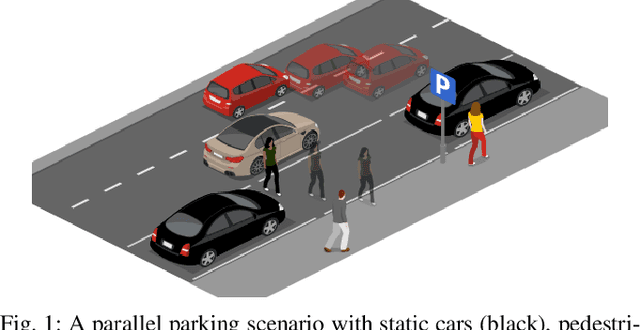
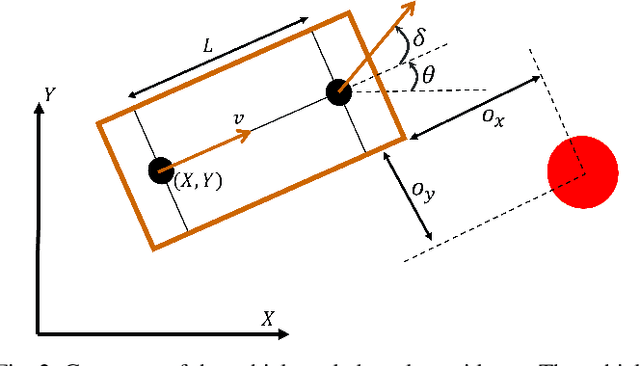
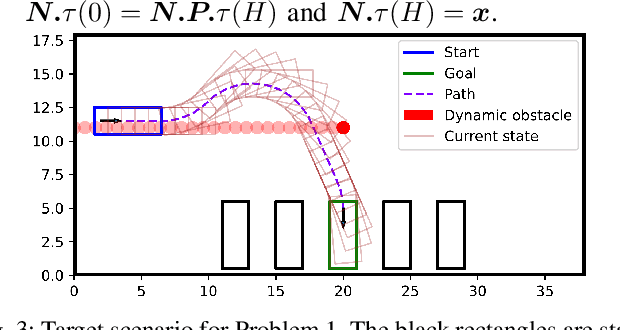
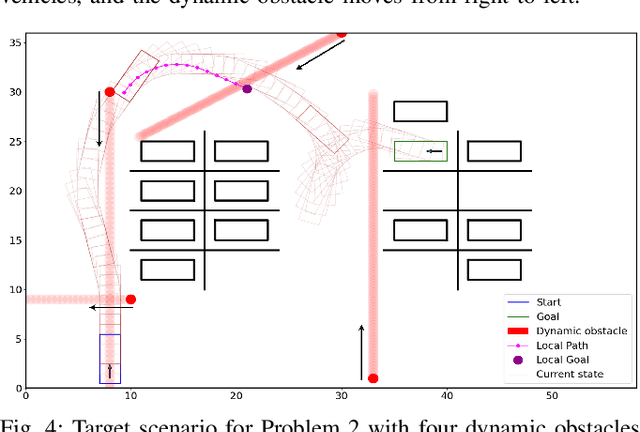
Safe and efficient path planning in parking scenarios presents a significant challenge due to the presence of cluttered environments filled with static and dynamic obstacles. To address this, we propose a novel and computationally efficient planning strategy that seamlessly integrates the predictions of dynamic obstacles into the planning process, ensuring the generation of collision-free paths. Our approach builds upon the conventional Hybrid A star algorithm by introducing a time-indexed variant that explicitly accounts for the predictions of dynamic obstacles during node exploration in the graph, thus enabling dynamic obstacle avoidance. We integrate the time-indexed Hybrid A star algorithm within an online planning framework to compute local paths at each planning step, guided by an adaptively chosen intermediate goal. The proposed method is validated in diverse parking scenarios, including perpendicular, angled, and parallel parking. Through simulations, we showcase our approach's potential in greatly improving the efficiency and safety when compared to the state of the art spline-based planning method for parking situations.
Delayed-Decision Motion Planning in the Presence of Multiple Predictions
Feb 28, 2025Reliable automated driving technology is challenged by various sources of uncertainties, in particular, behavioral uncertainties of traffic agents. It is common for traffic agents to have intentions that are unknown to others, leaving an automated driving car to reason over multiple possible behaviors. This paper formalizes a behavior planning scheme in the presence of multiple possible futures with corresponding probabilities. We present a maximum entropy formulation and show how, under certain assumptions, this allows delayed decision-making to improve safety. The general formulation is then turned into a model predictive control formulation, which is solved as a quadratic program or a set of quadratic programs. We discuss implementation details for improving computation and verify operation in simulation and on a mobile robot.
End-to-End Predictive Planner for Autonomous Driving with Consistency Models
Feb 12, 2025Trajectory prediction and planning are fundamental components for autonomous vehicles to navigate safely and efficiently in dynamic environments. Traditionally, these components have often been treated as separate modules, limiting the ability to perform interactive planning and leading to computational inefficiency in multi-agent scenarios. In this paper, we present a novel unified and data-driven framework that integrates prediction and planning with a single consistency model. Trained on real-world human driving datasets, our consistency model generates samples from high-dimensional, multimodal joint trajectory distributions of the ego and multiple surrounding agents, enabling end-to-end predictive planning. It effectively produces interactive behaviors, such as proactive nudging and yielding to ensure both safe and efficient interactions with other road users. To incorporate additional planning constraints on the ego vehicle, we propose an alternating direction method for multi-objective guidance in online guided sampling. Compared to diffusion models, our consistency model achieves better performance with fewer sampling steps, making it more suitable for real-time deployment. Experimental results on Waymo Open Motion Dataset (WOMD) demonstrate our method's superiority in trajectory quality, constraint satisfaction, and interactive behavior compared to various existing approaches.
Don't Get Stuck: A Deadlock Recovery Approach
Aug 19, 2024When multiple agents share space, interactions can lead to deadlocks, where no agent can advance towards its goal. This paper addresses this challenge with a deadlock recovery strategy. In particular, the proposed algorithm integrates hybrid-A$^\star$, STL, and MPPI frameworks. Specifically, hybrid-A$^\star$ generates a reference path, STL defines a goal (deadlock avoidance) and associated constraints (w.r.t. traffic rules), and MPPI refines the path and speed accordingly. This STL-MPPI framework ensures system compliance to specifications and dynamics while ensuring the safety of the resulting maneuvers, indicating a strong potential for application to complex traffic scenarios (and rules) in practice. Validation studies are conducted in simulations and on scaled cars, respectively, to demonstrate the effectiveness of the proposed algorithm.
Cooperative Bidirectional Mixed-Traffic Overtaking
Nov 14, 2023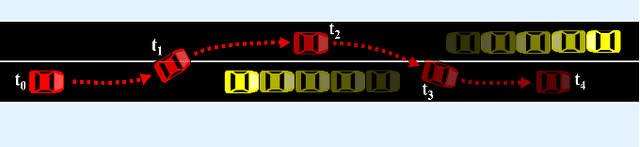
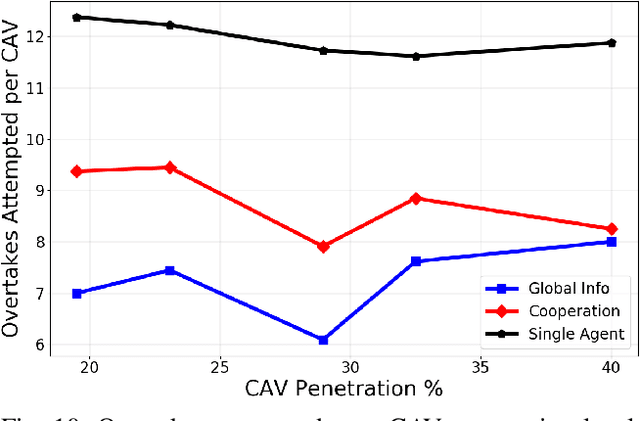
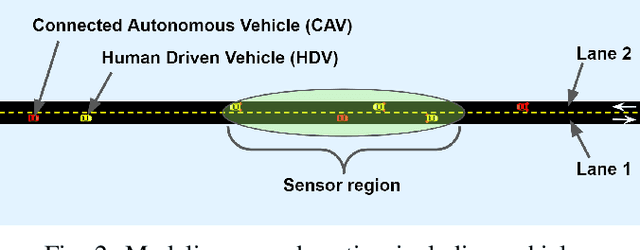
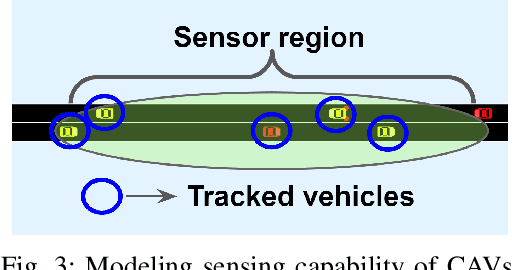
Safe overtaking, especially in a bidirectional mixed-traffic setting, remains a key challenge for Connected Autonomous Vehicles (CAVs). The presence of human-driven vehicles (HDVs), behavior unpredictability, and blind spots resulting from sensor occlusion make this a challenging control problem. To overcome these difficulties, we propose a cooperative communication-based approach that utilizes the information shared between CAVs to reduce the effects of sensor occlusion while benefiting from the local velocity prediction based on past tracking data. Our control framework aims to perform overtaking maneuvers with the objective of maximizing velocity while prioritizing safety and passenger comfort. Our method is also capable of reactively adjusting its plan to dynamic changes in the environment. The performance of the proposed approach is verified using realistic traffic simulations.
* Published in: 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC)
RCMS: Risk-Aware Crash Mitigation System for Autonomous Vehicles
Sep 21, 2023We propose a risk-aware crash mitigation system (RCMS), to augment any existing motion planner (MP), that enables an autonomous vehicle to perform evasive maneuvers in high-risk situations and minimize the severity of collision if a crash is inevitable. In order to facilitate a smooth transition between RCMS and MP, we develop a novel activation mechanism that combines instantaneous as well as predictive collision risk evaluation strategies in a unified hysteresis-band approach. For trajectory planning, we deploy a modular receding horizon optimization-based approach that minimizes a smooth situational risk profile, while adhering to the physical road limits as well as vehicular actuator limits. We demonstrate the performance of our approach in a simulation environment.