 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOccupancy-aware Trajectory Planning for Autonomous Valet Parking in Uncertain Dynamic Environments
Sep 11, 2025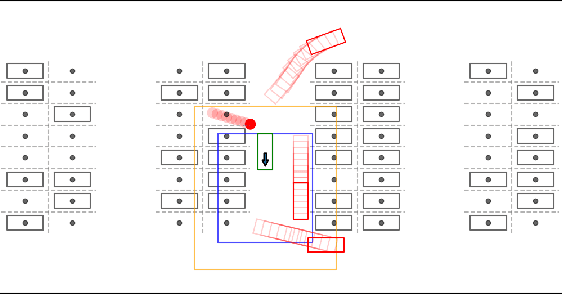
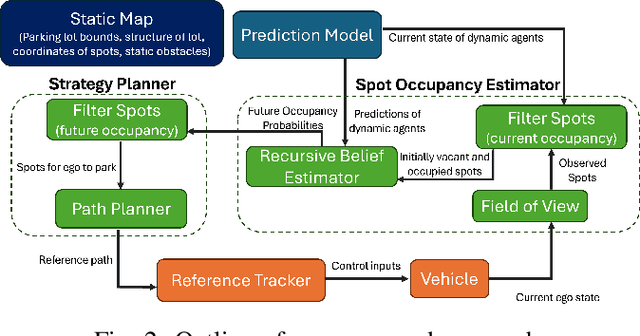
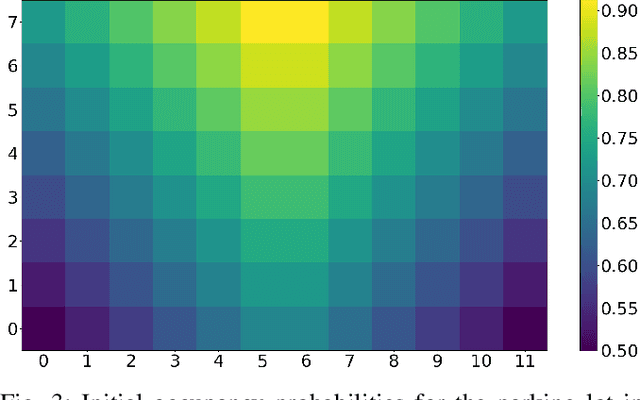
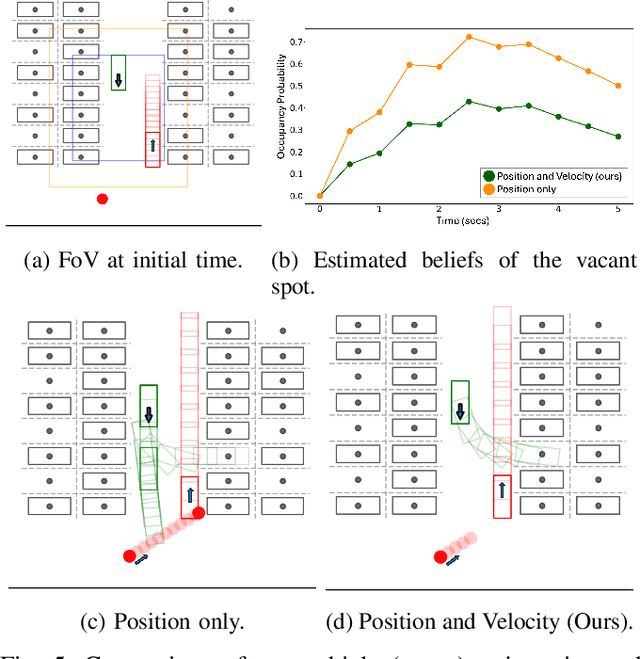
Accurately reasoning about future parking spot availability and integrated planning is critical for enabling safe and efficient autonomous valet parking in dynamic, uncertain environments. Unlike existing methods that rely solely on instantaneous observations or static assumptions, we present an approach that predicts future parking spot occupancy by explicitly distinguishing between initially vacant and occupied spots, and by leveraging the predicted motion of dynamic agents. We introduce a probabilistic spot occupancy estimator that incorporates partial and noisy observations within a limited Field-of-View (FoV) model and accounts for the evolving uncertainty of unobserved regions. Coupled with this, we design a strategy planner that adaptively balances goal-directed parking maneuvers with exploratory navigation based on information gain, and intelligently incorporates wait-and-go behaviors at promising spots. Through randomized simulations emulating large parking lots, we demonstrate that our framework significantly improves parking efficiency, safety margins, and trajectory smoothness compared to existing approaches.
Graph-based Path Planning with Dynamic Obstacle Avoidance for Autonomous Parking
Apr 17, 2025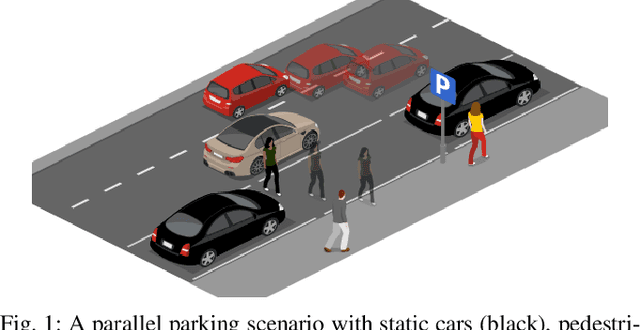
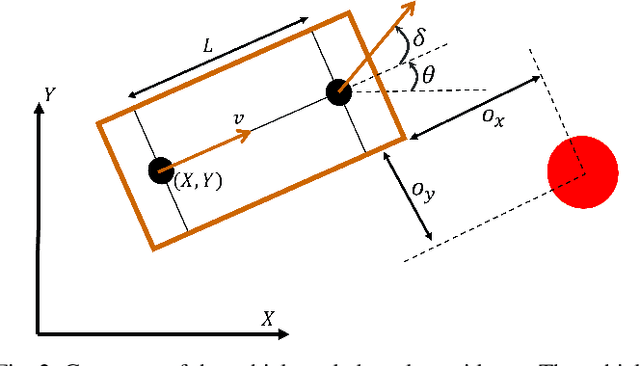
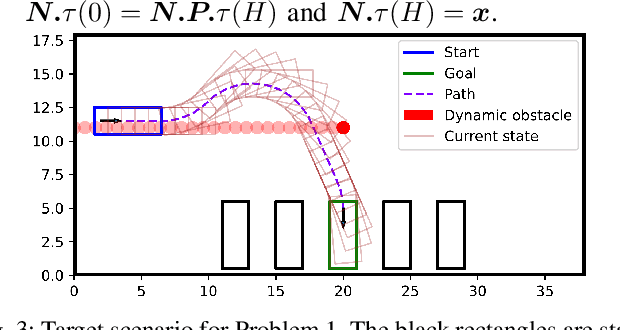
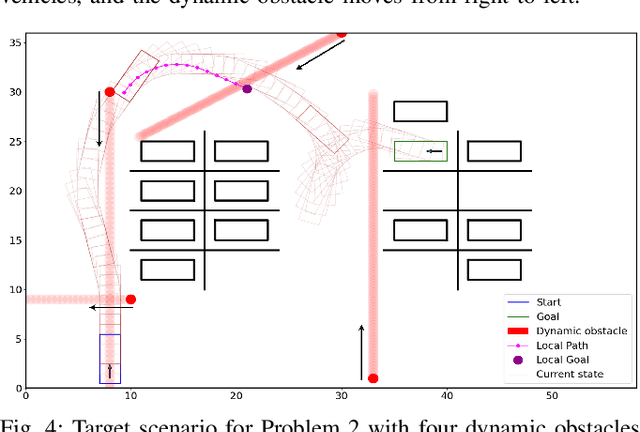
Safe and efficient path planning in parking scenarios presents a significant challenge due to the presence of cluttered environments filled with static and dynamic obstacles. To address this, we propose a novel and computationally efficient planning strategy that seamlessly integrates the predictions of dynamic obstacles into the planning process, ensuring the generation of collision-free paths. Our approach builds upon the conventional Hybrid A star algorithm by introducing a time-indexed variant that explicitly accounts for the predictions of dynamic obstacles during node exploration in the graph, thus enabling dynamic obstacle avoidance. We integrate the time-indexed Hybrid A star algorithm within an online planning framework to compute local paths at each planning step, guided by an adaptively chosen intermediate goal. The proposed method is validated in diverse parking scenarios, including perpendicular, angled, and parallel parking. Through simulations, we showcase our approach's potential in greatly improving the efficiency and safety when compared to the state of the art spline-based planning method for parking situations.
Reactive Temporal Logic-based Planning and Control for Interactive Robotic Tasks
Apr 30, 2024Robots interacting with humans must be safe, reactive and adapt online to unforeseen environmental and task changes. Achieving these requirements concurrently is a challenge as interactive planners lack formal safety guarantees, while safe motion planners lack flexibility to adapt. To tackle this, we propose a modular control architecture that generates both safe and reactive motion plans for human-robot interaction by integrating temporal logic-based discrete task level plans with continuous Dynamical System (DS)-based motion plans. We formulate a reactive temporal logic formula that enables users to define task specifications through structured language, and propose a planning algorithm at the task level that generates a sequence of desired robot behaviors while being adaptive to environmental changes. At the motion level, we incorporate control Lyapunov functions and control barrier functions to compute stable and safe continuous motion plans for two types of robot behaviors: (i) complex, possibly periodic motions given by autonomous DS and (ii) time-critical tasks specified by Signal Temporal Logic~(STL). Our methodology is demonstrated on the Franka robot arm performing wiping tasks on a whiteboard and a mannequin that is compliant to human interactions and adaptive to environmental changes.
Learning Safe and Stable Motion Plans with Neural Ordinary Differential Equations
Jul 31, 2023

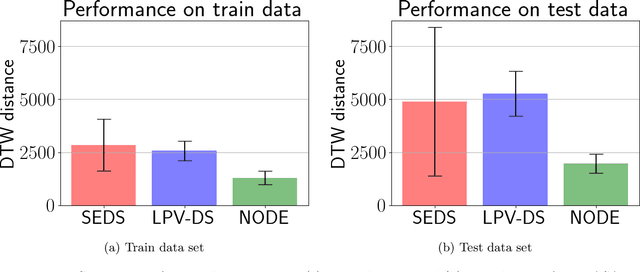

A learning-based modular motion planning pipeline is presented that is compliant, safe, and reactive to perturbations at task execution. A nominal motion plan, defined as a nonlinear autonomous dynamical system (DS), is learned offline from kinesthetic demonstrations using a Neural Ordinary Differential Equation (NODE) model. To ensure both stability and safety during inference, a novel approach is proposed which selects a target point at each time step for the robot to follow, using a time-varying target trajectory generated by the learned NODE. A correction term to the NODE model is computed online by solving a Quadratic Program that guarantees stability and safety using Control Lyapunov Functions and Control Barrier Functions, respectively. Our approach outperforms baseline DS learning techniques on the LASA handwriting dataset and is validated on real-robot experiments where it is shown to produce stable motions, such as wiping and stirring, while being robust to physical perturbations and safe around humans and obstacles.