 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Safe and Stable Motion Plans with Neural Ordinary Differential Equations
Paper and Code


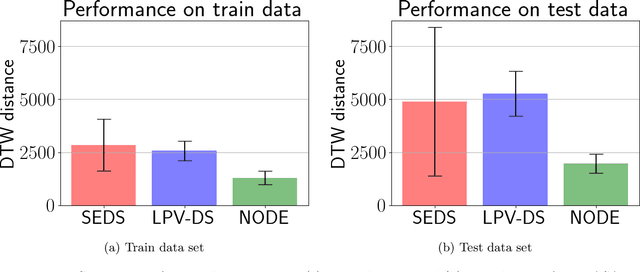

A learning-based modular motion planning pipeline is presented that is compliant, safe, and reactive to perturbations at task execution. A nominal motion plan, defined as a nonlinear autonomous dynamical system (DS), is learned offline from kinesthetic demonstrations using a Neural Ordinary Differential Equation (NODE) model. To ensure both stability and safety during inference, a novel approach is proposed which selects a target point at each time step for the robot to follow, using a time-varying target trajectory generated by the learned NODE. A correction term to the NODE model is computed online by solving a Quadratic Program that guarantees stability and safety using Control Lyapunov Functions and Control Barrier Functions, respectively. Our approach outperforms baseline DS learning techniques on the LASA handwriting dataset and is validated on real-robot experiments where it is shown to produce stable motions, such as wiping and stirring, while being robust to physical perturbations and safe around humans and obstacles.