 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantum Generative Adversarial Autoencoders: Learning latent representations for quantum data generation
Sep 19, 2025In this work, we introduce the Quantum Generative Adversarial Autoencoder (QGAA), a quantum model for generation of quantum data. The QGAA consists of two components: (a) Quantum Autoencoder (QAE) to compress quantum states, and (b) Quantum Generative Adversarial Network (QGAN) to learn the latent space of the trained QAE. This approach imparts the QAE with generative capabilities. The utility of QGAA is demonstrated in two representative scenarios: (a) generation of pure entangled states, and (b) generation of parameterized molecular ground states for H$_2$ and LiH. The average errors in the energies estimated by the trained QGAA are 0.02 Ha for H$_2$ and 0.06 Ha for LiH in simulations upto 6 qubits. These results illustrate the potential of QGAA for quantum state generation, quantum chemistry, and near-term quantum machine learning applications.
Occupancy-aware Trajectory Planning for Autonomous Valet Parking in Uncertain Dynamic Environments
Sep 11, 2025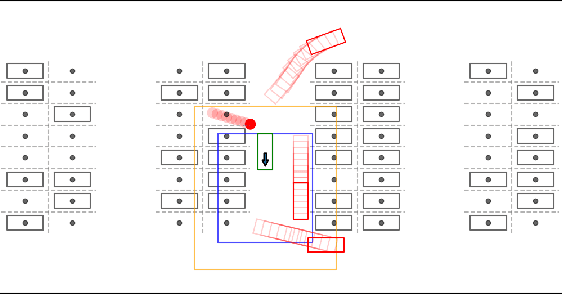
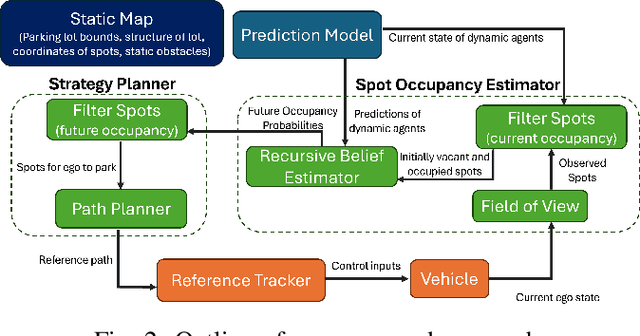
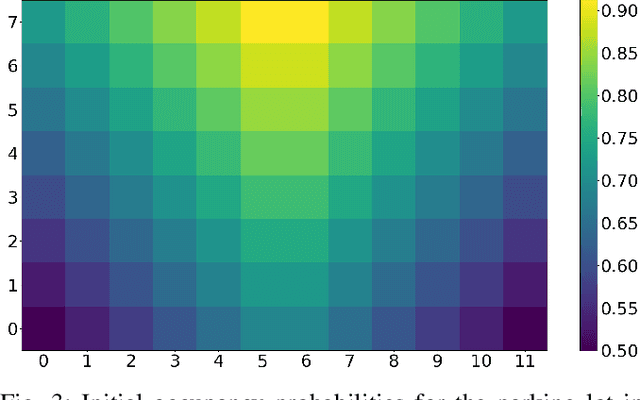
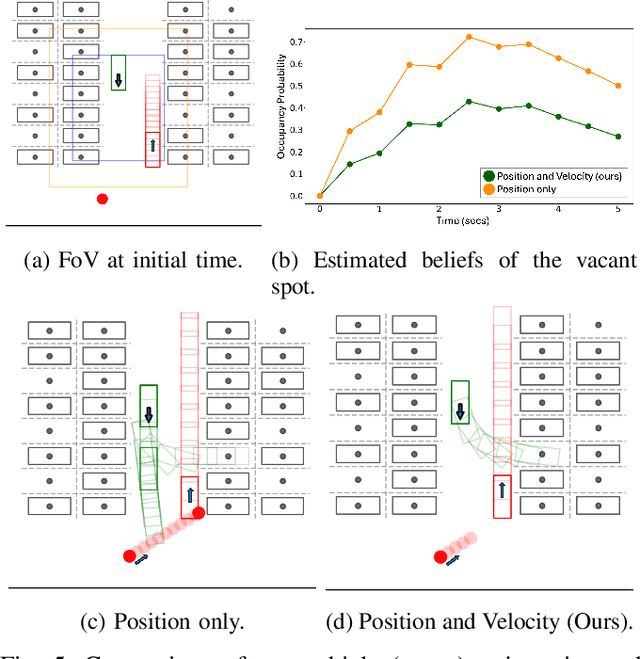
Accurately reasoning about future parking spot availability and integrated planning is critical for enabling safe and efficient autonomous valet parking in dynamic, uncertain environments. Unlike existing methods that rely solely on instantaneous observations or static assumptions, we present an approach that predicts future parking spot occupancy by explicitly distinguishing between initially vacant and occupied spots, and by leveraging the predicted motion of dynamic agents. We introduce a probabilistic spot occupancy estimator that incorporates partial and noisy observations within a limited Field-of-View (FoV) model and accounts for the evolving uncertainty of unobserved regions. Coupled with this, we design a strategy planner that adaptively balances goal-directed parking maneuvers with exploratory navigation based on information gain, and intelligently incorporates wait-and-go behaviors at promising spots. Through randomized simulations emulating large parking lots, we demonstrate that our framework significantly improves parking efficiency, safety margins, and trajectory smoothness compared to existing approaches.
Frenet Corridor Planner: An Optimal Local Path Planning Framework for Autonomous Driving
May 06, 2025Motivated by the requirements for effectiveness and efficiency, path-speed decomposition-based trajectory planning methods have widely been adopted for autonomous driving applications. While a global route can be pre-computed offline, real-time generation of adaptive local paths remains crucial. Therefore, we present the Frenet Corridor Planner (FCP), an optimization-based local path planning strategy for autonomous driving that ensures smooth and safe navigation around obstacles. Modeling the vehicles as safety-augmented bounding boxes and pedestrians as convex hulls in the Frenet space, our approach defines a drivable corridor by determining the appropriate deviation side for static obstacles. Thereafter, a modified space-domain bicycle kinematics model enables path optimization for smoothness, boundary clearance, and dynamic obstacle risk minimization. The optimized path is then passed to a speed planner to generate the final trajectory. We validate FCP through extensive simulations and real-world hardware experiments, demonstrating its efficiency and effectiveness.
Enhancing variational quantum algorithms by balancing training on classical and quantum hardware
Mar 20, 2025Quantum computers offer a promising route to tackling problems that are classically intractable such as in prime-factorization, solving large-scale linear algebra and simulating complex quantum systems, but require fault-tolerant quantum hardware. On the other hand, variational quantum algorithms (VQAs) have the potential to provide a near-term route to quantum utility or advantage, and is usually constructed by using parametrized quantum circuits (PQCs) in combination with a classical optimizer for training. Although VQAs have been proposed for a multitude of tasks such as ground-state estimation, combinatorial optimization and unitary compilation, there remain major challenges in its trainability and resource costs on quantum hardware. Here we address these challenges by adopting Hardware Efficient and dynamical LIe algebra Supported Ansatz (HELIA), and propose two training schemes that combine an existing g-sim method (that uses the underlying group structure of the operators) and the Parameter-Shift Rule (PSR). Our improvement comes from distributing the resources required for gradient estimation and training to both classical and quantum hardware. We numerically test our proposal for ground-state estimation using Variational Quantum Eigensolver (VQE) and classification of quantum phases using quantum neural networks. Our methods show better accuracy and success of trials, and also need fewer calls to the quantum hardware on an average than using only PSR (upto 60% reduction), that runs exclusively on quantum hardware. We also numerically demonstrate the capability of HELIA in mitigating barren plateaus, paving the way for training large-scale quantum models.
Delayed-Decision Motion Planning in the Presence of Multiple Predictions
Feb 28, 2025Reliable automated driving technology is challenged by various sources of uncertainties, in particular, behavioral uncertainties of traffic agents. It is common for traffic agents to have intentions that are unknown to others, leaving an automated driving car to reason over multiple possible behaviors. This paper formalizes a behavior planning scheme in the presence of multiple possible futures with corresponding probabilities. We present a maximum entropy formulation and show how, under certain assumptions, this allows delayed decision-making to improve safety. The general formulation is then turned into a model predictive control formulation, which is solved as a quadratic program or a set of quadratic programs. We discuss implementation details for improving computation and verify operation in simulation and on a mobile robot.
Combining Transfer Learning with In-context Learning using Blackbox LLMs for Zero-shot Knowledge Base Question Answering
Nov 15, 2023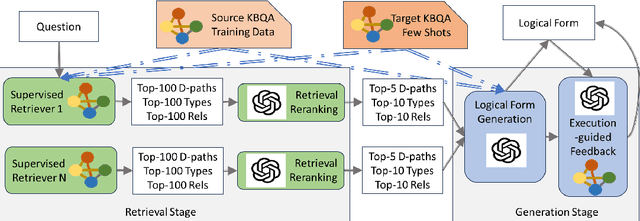

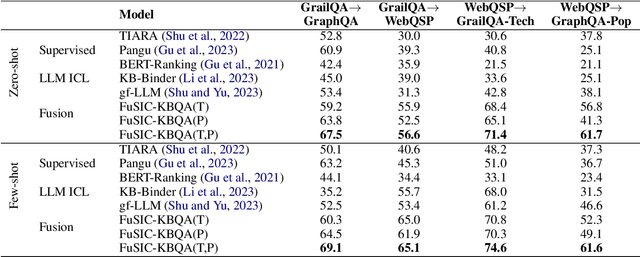
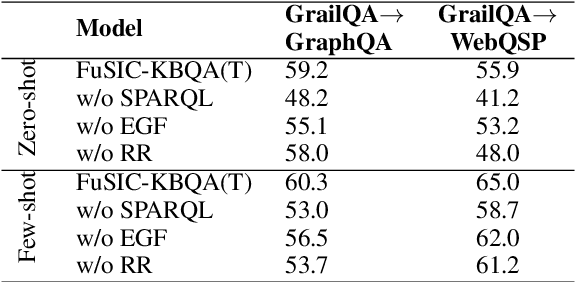
We address the zero-shot transfer learning setting for the knowledge base question answering (KBQA) problem, where a large volume of labeled training data is available for the source domain, but no such labeled examples are available for the target domain. Transfer learning for KBQA makes use of large volumes of unlabeled data in the target in addition to the labeled data in the source. More recently, few-shot in-context learning using Black-box Large Language Models (BLLMs) has been adapted for KBQA without considering any source domain data. In this work, we show how to meaningfully combine these two paradigms for KBQA so that their benefits add up. Specifically, we preserve the two stage retrieve-then-generate pipeline of supervised KBQA and introduce interaction between in-context learning using BLLMs and transfer learning from the source for both stages. In addition, we propose execution-guided self-refinement using BLLMs, decoupled from the transfer setting. With the help of experiments using benchmark datasets GrailQA as the source and WebQSP as the target, we show that the proposed combination brings significant improvements to both stages and also outperforms by a large margin state-of-the-art supervised KBQA models trained on the source. We also show that in the in-domain setting, the proposed BLLM augmentation significantly outperforms state-of-the-art supervised models, when the volume of labeled data is limited, and also outperforms these marginally even when using the entire large training dataset.
Neuroadaptation in Physical Human-Robot Collaboration
Sep 30, 2023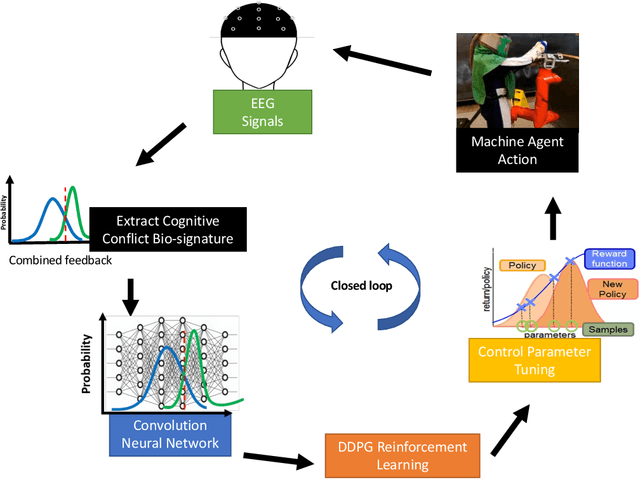
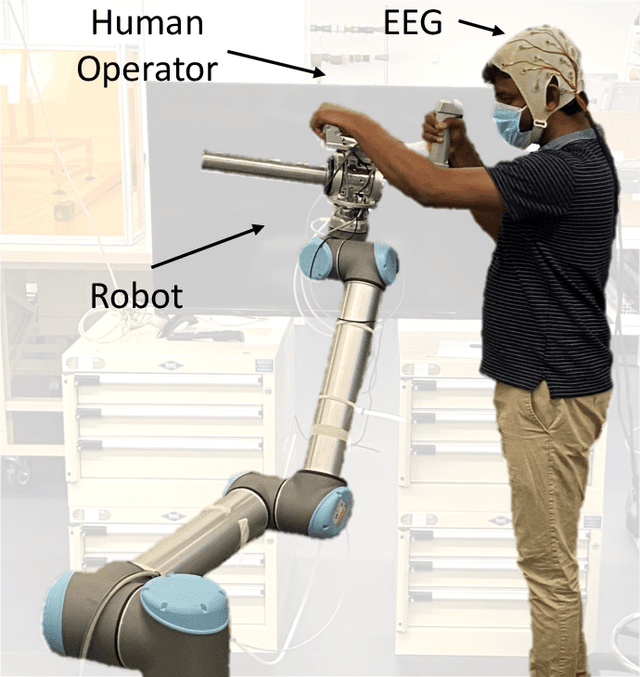
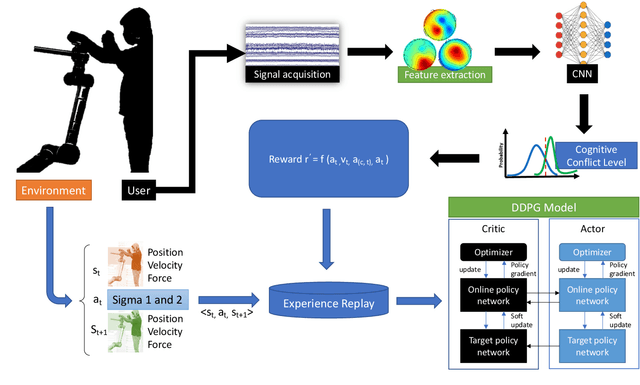
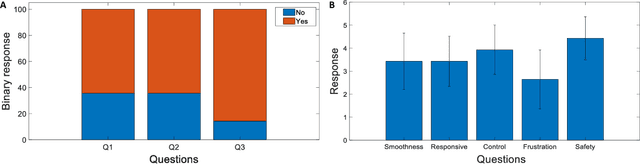
Robots for physical Human-Robot Collaboration (pHRC) systems need to change their behavior and how they operate in consideration of several factors, such as the performance and intention of a human co-worker and the capabilities of different human-co-workers in collision avoidance and singularity of the robot operation. As the system's admittance becomes variable throughout the workspace, a potential solution is to tune the interaction forces and control the parameters based on the operator's requirements. To overcome this issue, we have demonstrated a novel closed-loop-neuroadaptive framework for pHRC. We have applied cognitive conflict information in a closed-loop manner, with the help of reinforcement learning, to adapt to robot strategy and compare this with open-loop settings. The experiment results show that the closed-loop-based neuroadaptive framework successfully reduces the level of cognitive conflict during pHRC, consequently increasing the smoothness and intuitiveness of human-robot collaboration. These results suggest the feasibility of a neuroadaptive approach for future pHRC control systems through electroencephalogram (EEG) signals.
Do I have the Knowledge to Answer? Investigating Answerability of Knowledge Base Questions
Dec 20, 2022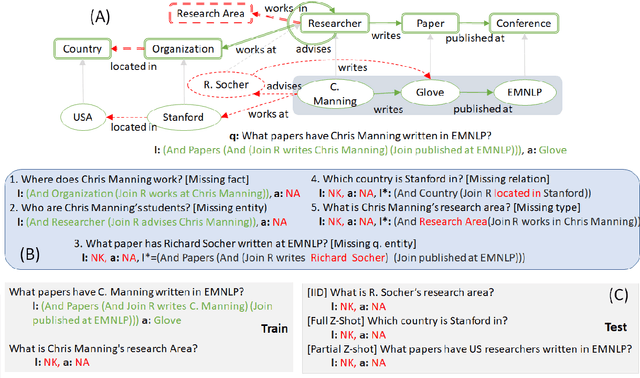

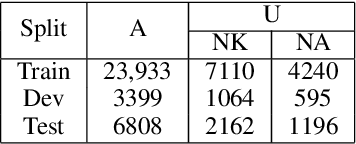
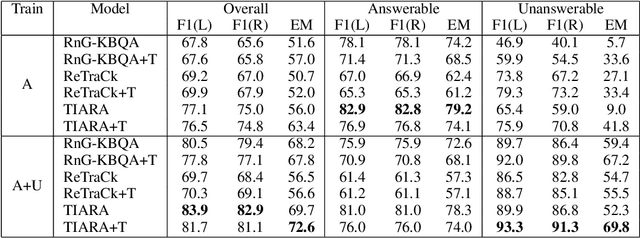
When answering natural language questions over knowledge bases (KBs), incompleteness in the KB can naturally lead to many questions being unanswerable. While answerability has been explored in other QA settings, it has not been studied for QA over knowledge bases (KBQA). We first identify various forms of KB incompleteness that can result in a question being unanswerable. We then propose GrailQAbility, a new benchmark dataset, which systematically modifies GrailQA (a popular KBQA dataset) to represent all these incompleteness issues. Testing two state-of-the-art KBQA models (trained on original GrailQA as well as our GrailQAbility), we find that both models struggle to detect unanswerable questions, or sometimes detect them for the wrong reasons. Consequently, both models suffer significant loss in performance, underscoring the need for further research in making KBQA systems robust to unanswerability.
Ransomware Detection using Process Memory
Mar 31, 2022



Ransomware attacks have increased significantly in recent years, causing great destruction and damage to critical systems and business operations. Attackers are unfailingly finding innovative ways to bypass detection mechanisms, whichencouraged the adoption of artificial intelligence. However, most research summarizes the general features of AI and induces many false positives, as the behavior of ransomware constantly differs to bypass detection. Focusing on the key indicating features of ransomware becomes vital as this guides the investigator to the inner workings and main function of ransomware itself. By utilizing access privileges in process memory, the main function of the ransomware can be detected more easily and accurately. Furthermore, new signatures and fingerprints of ransomware families can be identified to classify novel ransomware attacks correctly. The current research used the process memory access privileges of the different memory regions of the behavior of an executable to quickly determine its intent before serious harm can occur. To achieve this aim, several well-known machine learning algorithms were explored with an accuracy range of 81.38 to 96.28 percents. The study thus confirms the feasibility of utilizing process memory as a detection mechanism for ransomware.
* 11 Pages, 3 Figures, and 11 Tables
RoboFly: An insect-sized robot with simplified fabrication that is capable of flight, ground, and water surface locomotion
Jan 08, 2020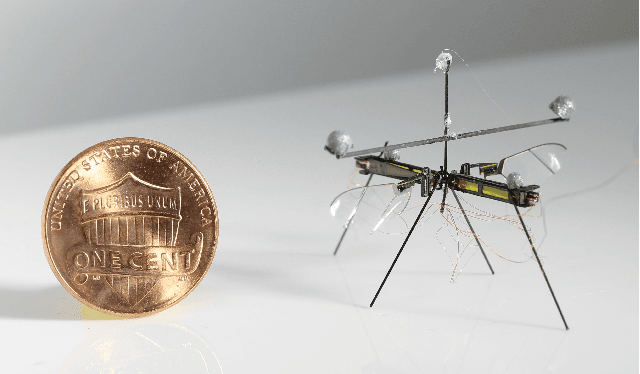
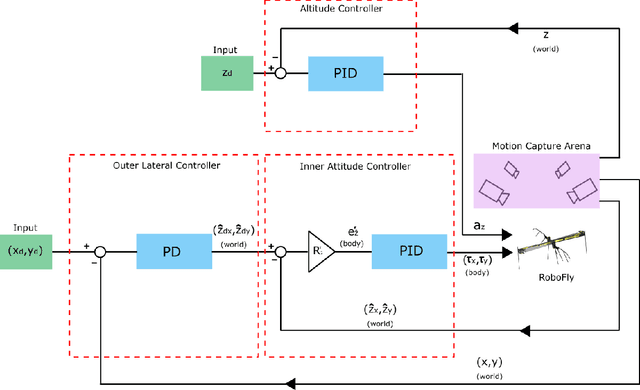
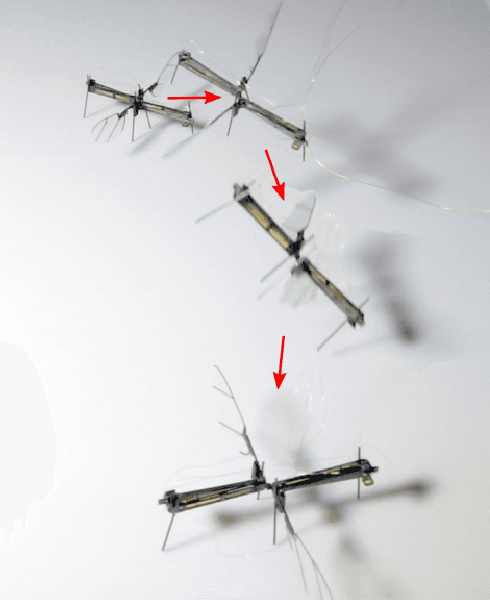
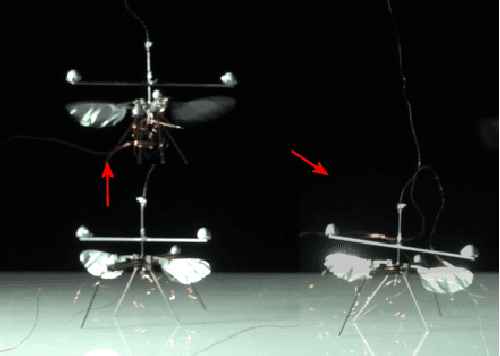
Aerial robots the size of a honeybee (~100 mg) have advantages over larger robots because of their small size, low mass and low materials cost. Previous iterations have demonstrated controlled flight but were difficult to fabricate because they consisted of many separate parts assembled together. They also were unable to perform locomotion modes besides flight. This paper presents a new design of a 74 mg flapping-wing robot that dramatically reduces the number of parts and simplifies fabrication. It also has a lower center of mass, which allows the robot to additionally land without the need for long legs, even in case of unstable flight. Furthermore, we show that the new design allows for wing-driven ground and air-water interfacial locomotion, improving the versatility of the robot. Forward thrust is generated by increasing the speed of downstroke relative to the upstroke of the flapping wings. This also allows for steering. The ability to land and subsequently move along the ground allows the robot to negotiate extremely confined spaces, underneath obstacles, and to precise locations. We describe the new design in detail and present results demonstrating these capabilities, as well as hovering flight and controlled landing.