 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDelayed-Decision Motion Planning in the Presence of Multiple Predictions
Feb 28, 2025Reliable automated driving technology is challenged by various sources of uncertainties, in particular, behavioral uncertainties of traffic agents. It is common for traffic agents to have intentions that are unknown to others, leaving an automated driving car to reason over multiple possible behaviors. This paper formalizes a behavior planning scheme in the presence of multiple possible futures with corresponding probabilities. We present a maximum entropy formulation and show how, under certain assumptions, this allows delayed decision-making to improve safety. The general formulation is then turned into a model predictive control formulation, which is solved as a quadratic program or a set of quadratic programs. We discuss implementation details for improving computation and verify operation in simulation and on a mobile robot.
Multi-Profile Quadratic Programming (MPQP) for Optimal Gap Selection and Speed Planning of Autonomous Driving
Jan 12, 2024



Smooth and safe speed planning is imperative for the successful deployment of autonomous vehicles. This paper presents a mathematical formulation for the optimal speed planning of autonomous driving, which has been validated in high-fidelity simulations and real-road demonstrations with practical constraints. The algorithm explores the inter-traffic gaps in the time and space domain using a breadth-first search. For each gap, quadratic programming finds an optimal speed profile, synchronizing the time and space pair along with dynamic obstacles. Qualitative and quantitative analysis in Carla is reported to discuss the smoothness and robustness of the proposed algorithm. Finally, we present a road demonstration result for urban city driving.
Towards Full Automated Drive in Urban Environments: A Demonstration in GoMentum Station, California
May 02, 2017
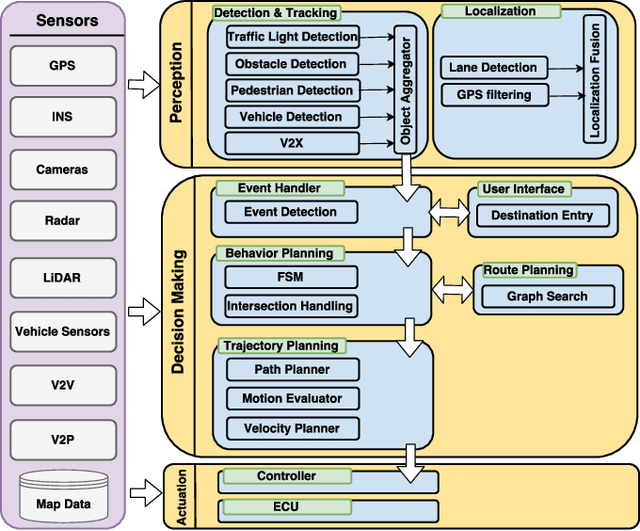
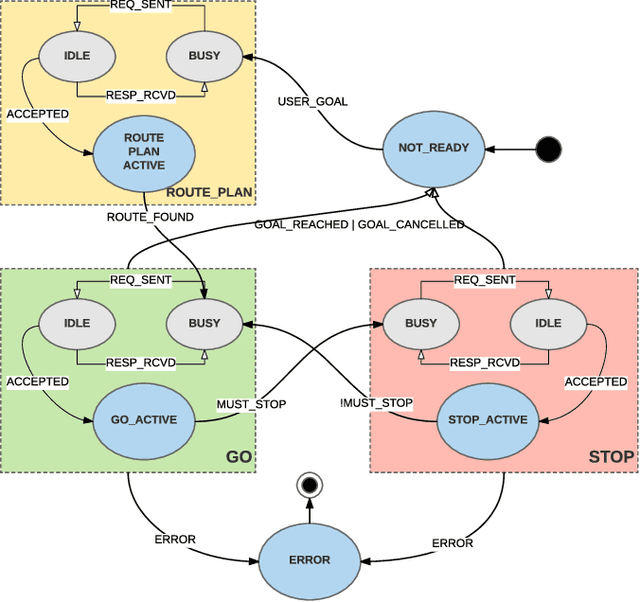
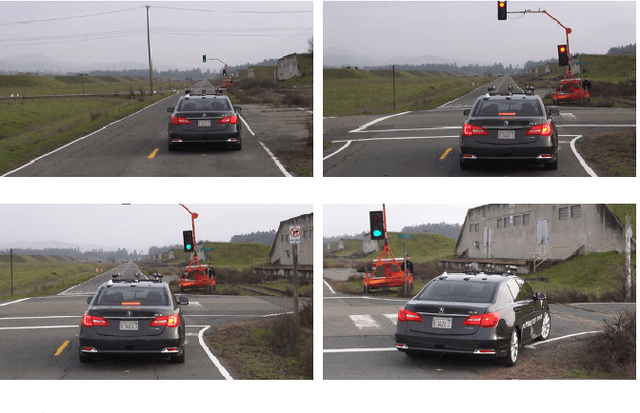
Each year, millions of motor vehicle traffic accidents all over the world cause a large number of fatalities, injuries and significant material loss. Automated Driving (AD) has potential to drastically reduce such accidents. In this work, we focus on the technical challenges that arise from AD in urban environments. We present the overall architecture of an AD system and describe in detail the perception and planning modules. The AD system, built on a modified Acura RLX, was demonstrated in a course in GoMentum Station in California. We demonstrated autonomous handling of 4 scenarios: traffic lights, cross-traffic at intersections, construction zones and pedestrians. The AD vehicle displayed safe behavior and performed consistently in repeated demonstrations with slight variations in conditions. Overall, we completed 44 runs, encompassing 110km of automated driving with only 3 cases where the driver intervened the control of the vehicle, mostly due to error in GPS positioning. Our demonstration showed that robust and consistent behavior in urban scenarios is possible, yet more investigation is necessary for full scale roll-out on public roads.