 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeasuring What Matters: Scenario-Driven Evaluation for Trajectory Predictors in Autonomous Driving
Dec 13, 2025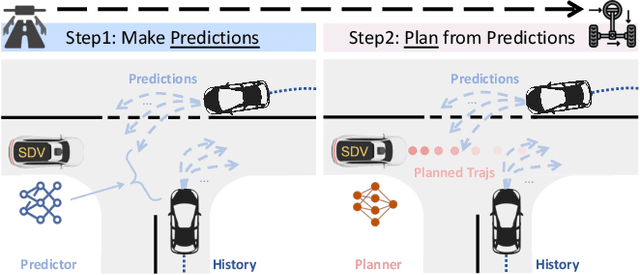
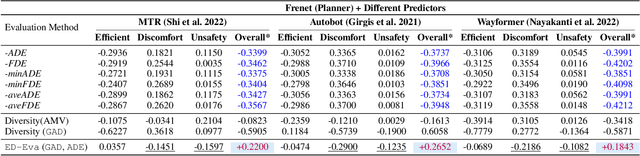
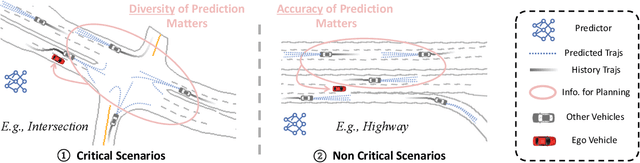
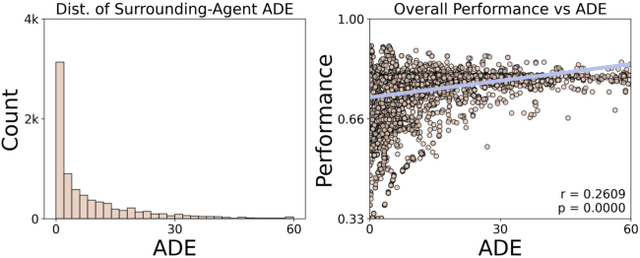
Being able to anticipate the motion of surrounding agents is essential for the safe operation of autonomous driving systems in dynamic situations. While various methods have been proposed for trajectory prediction, the current evaluation practices still rely on error-based metrics (e.g., ADE, FDE), which reveal the accuracy from a post-hoc view but ignore the actual effect the predictor brings to the self-driving vehicles (SDVs), especially in complex interactive scenarios: a high-quality predictor not only chases accuracy, but should also captures all possible directions a neighbor agent might move, to support the SDVs' cautious decision-making. Given that the existing metrics hardly account for this standard, in our work, we propose a comprehensive pipeline that adaptively evaluates the predictor's performance by two dimensions: accuracy and diversity. Based on the criticality of the driving scenario, these two dimensions are dynamically combined and result in a final score for the predictor's performance. Extensive experiments on a closed-loop benchmark using real-world datasets show that our pipeline yields a more reasonable evaluation than traditional metrics by better reflecting the correlation of the predictors' evaluation with the autonomous vehicles' driving performance. This evaluation pipeline shows a robust way to select a predictor that potentially contributes most to the SDV's driving performance.
Multi-Profile Quadratic Programming (MPQP) for Optimal Gap Selection and Speed Planning of Autonomous Driving
Jan 12, 2024



Smooth and safe speed planning is imperative for the successful deployment of autonomous vehicles. This paper presents a mathematical formulation for the optimal speed planning of autonomous driving, which has been validated in high-fidelity simulations and real-road demonstrations with practical constraints. The algorithm explores the inter-traffic gaps in the time and space domain using a breadth-first search. For each gap, quadratic programming finds an optimal speed profile, synchronizing the time and space pair along with dynamic obstacles. Qualitative and quantitative analysis in Carla is reported to discuss the smoothness and robustness of the proposed algorithm. Finally, we present a road demonstration result for urban city driving.